IPC-7093 CN 2011 底部端子元器件(BTC)设计和组装工艺的实施.pdf - 第79页
面 积 比 = LW / 2T ( L + W ) 宽 厚比 = W / T L 和 W 是 开 孔 长 度 , T 是模 板 厚度 宽 厚比 = 开 孔 宽 度 ( W ) 模 板 厚度 ( T ) > 1.5 面 积 比 = 开 孔 面 积 ( LxW ) 开 孔孔 壁 面 积 ( 2x ( L + W ) xT ) > 0.66 注: 如 果 开 孔 与 以 上所述不同, 重新 计 算 面 积 比 。 但 为了 简 化…
另一个常用的比例和优先技术就是面积比。激
光切割模板面积比一般要求大于0.66。面积比
的计算方法是模板开孔面积除以模板开孔壁的
面积。开孔面积除以开孔壁面积等于L*W/2*
(L+W)*T >0.66。
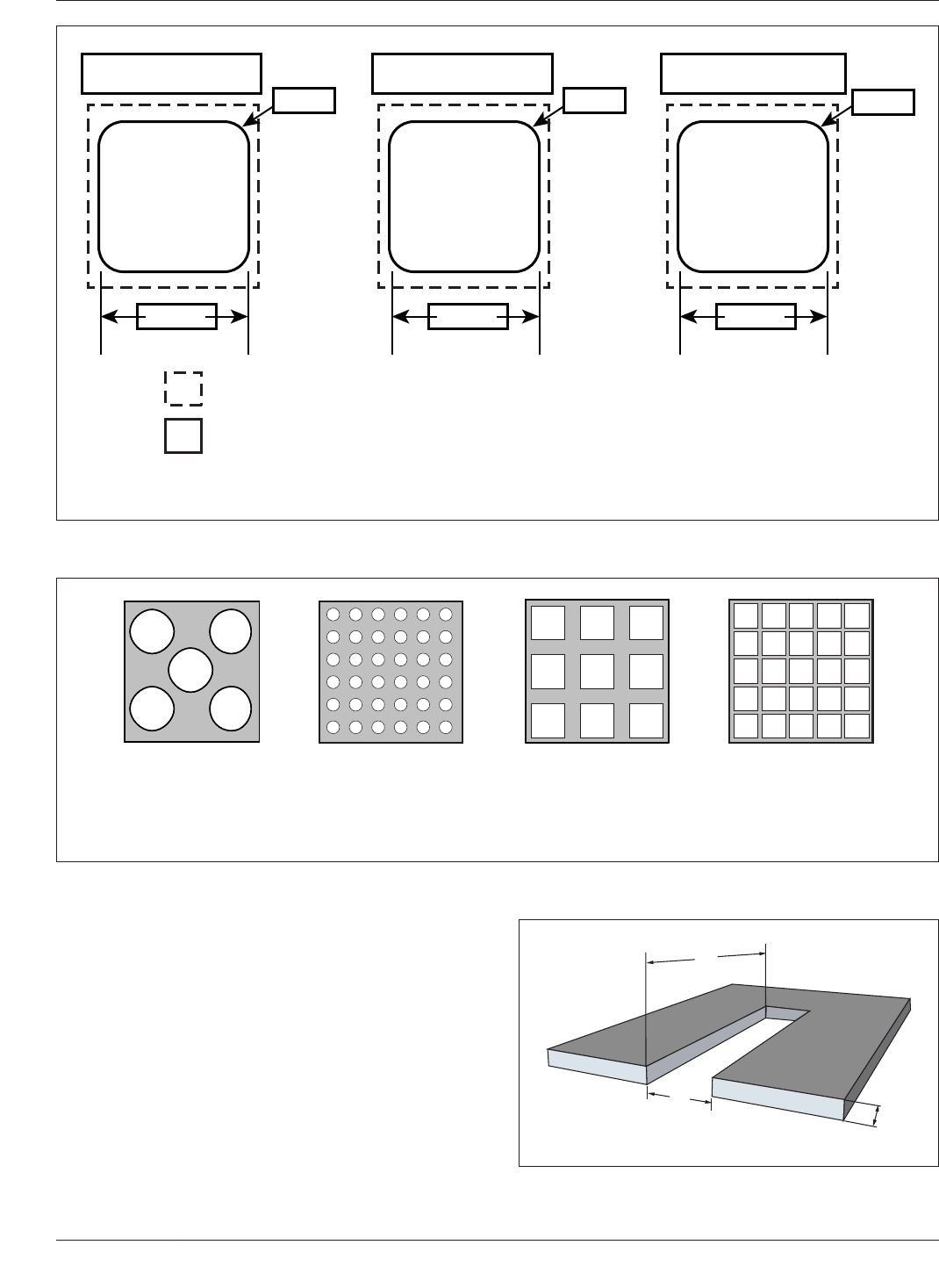
模板开孔的设计应该按照获得最大的焊膏释放
来设计。一般可通过下面两种比例来实现,见
图7-7。
IPC-7093-7-5-cn
图7-5 通⽤模板厚度推荐开孔尺⼨
100μm厚度 125μm厚度 150μm厚度
0.690
器件和电路板焊盘大小是0.635mm
2
模板开孔大小
不按比例
R0.16
R0.08
R0.06
0.565
0.620
IPC-7093-7-6-cn
图7-6 7x7mm和10x10mm BTC元器件散热焊盘模板设计
PPⴤᖴᔰᆄ
#PP䰤䐍
㾶ⴆ
PPⴤᖴᔰᆄ
#PP䰤䐍
㾶ⴆ
PPᔰᆄ
#PP䰤䐍
㾶ⴆ
PPᔰᆄ
#PP䰤䐍
㾶ⴆ
IPC-7093-7-7-cn
图7-7 模板开孔壁⾯积
W
L
T
IPC-7093-C 2011年3月
66
Copyright Association Connecting Electronics Industries
Provided by IHS under license with IPC
Not for Resale, 11/27/2015 17:57:03 MST
No reproduction or networking permitted without license from IHS
--`,`,,,,,,`,,,```,``````,`,,`,`-`-`,,`,,`,`,,`---
面积比 = LW/2T (L+W)
宽厚比 = W/T
L和W是开孔长度,T是模板厚度
宽厚比 =
开孔宽度(W)
模板厚度(T)
>1.5
面积比 =
开孔面积(LxW)
开孔孔壁面积(2x(L + W) xT)
>0.66
注:如果开孔与以上所述不同,重新计算面积
比。但为了简化,上面的公式还可使用,并得
出稍微保守的数值。
采用电铸加工的模板,面积比小于0.6也可以得
到很好的良率。IPC-7525模板设计指导有关于
其它模板设计规则的更多信息。
除了模板厚度和开孔设计变量约束以平衡焊膏
量和恰
当的焊膏释放,对带有镀金的BTC元器
件来说,金脆化也是一个问题(与EIG处理的
PCB连接时,更是这样)。为了得到足够的焊膏
量来减轻金脆化,某些情况下可考虑用较厚的
模板或套印。但是,这些施加焊料的方法会导
致焊膏释放和桥接问题。
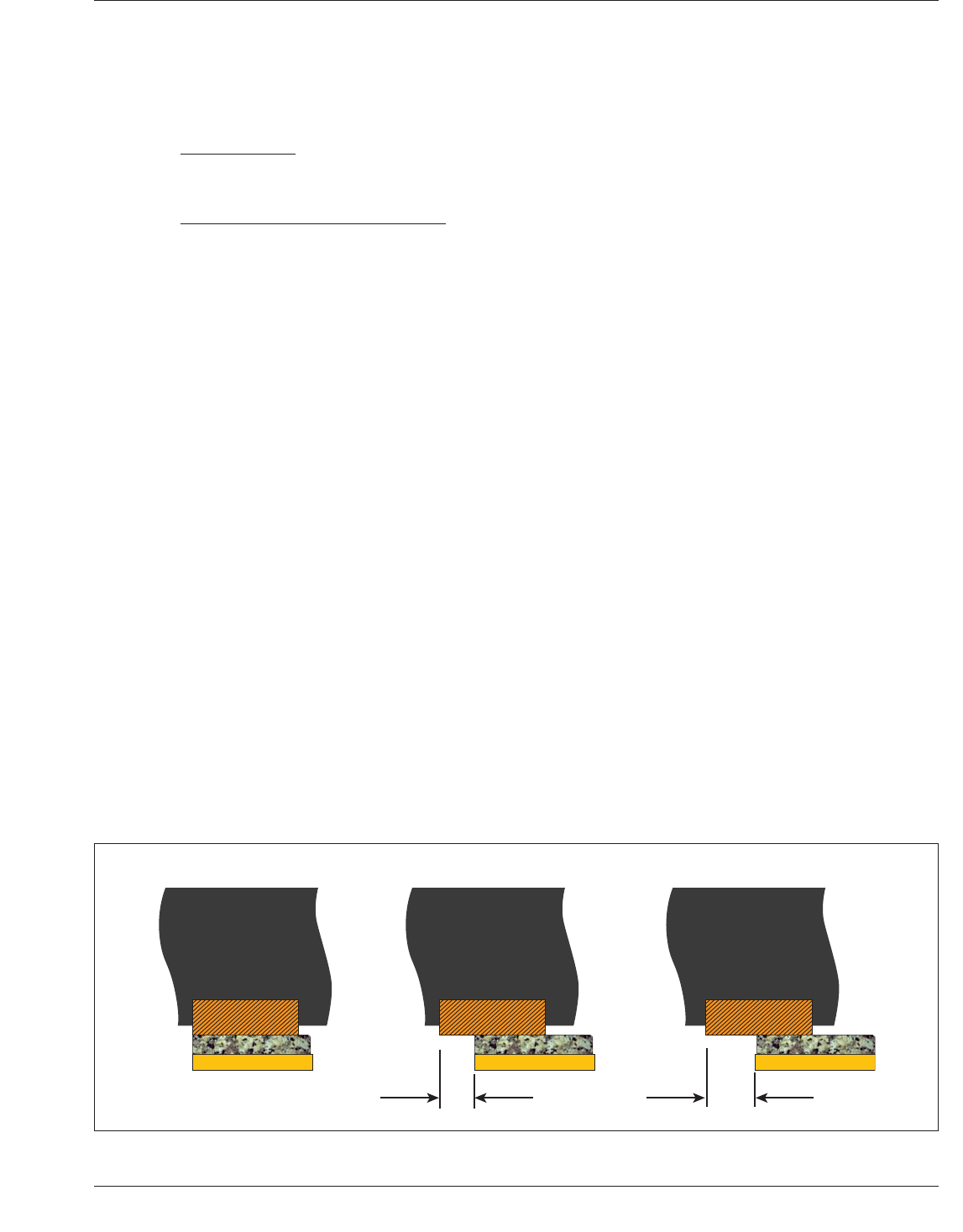
7.2.5 元器件贴装影响 吸取和贴装精度控制
封装元器件的定位和旋转对准,这与设备和工
艺相关。轻微的元器件偏移(偏移焊盘中心小于
25%)在过再流焊过程中会自动对准(见图7-8)。
较大的元器件偏移(偏移焊盘中心大于50%),
应该在再流焊前清除,因为这会演变成电气短
路,在再流焊时会导致焊料桥接。
7.2.5.1 贴装精度的视觉系统 贴装精度是组装
BTC工艺一个非常关键的部分。BTC贴装后出
现的问题,强烈建议不要试图通过移动它来纠
正,这样可能会造成相邻焊点间的桥接,因为
这 种 连接是无 法 目视 到的。贴片机的精度很
大程度 上 依
赖 视 觉 系统和 吸 嘴吸 住元器件的
能力。对于 这 种应 用视觉 系统 匹配也 是 很重
要的。视觉系统在贴装之前确定了每个元器件
的X、Y和角度补偿。除了确定元器件的偏移,
视觉系统还可以检测元器件尺寸的完整性。电
荷耦合元器件(CCD)摄像系统采用两种光学方
法,它们被称为二元度量和灰度度量。这两种
方法对对比度和亮度变化都是敏感的。
使用机器视觉系
统对准封装元器件有两种流行
的方法:封装轮廓,视觉系统定位封装的外形;
另外一种是端子识别,视觉系统定位封装的端
子或引线。
一些视觉系统可以直接定位焊盘上的金属化图
形。两种方法都适用于BTC贴装。端子识别类
的对准精度会较高,但是因为贴片机要处理较
复杂的视觉信号而速度较慢。识别封装外形吸
取和贴装过程更快,但是精度较差。两种方法
都可以接受,并已得到许多贴片机供应商和合
约
PCB组装厂成功证实。
根据吸取和贴装系统的类型,封装载体形式的
变化是需要的。局部基准点也有利于帮助视觉
系统识别BTC焊盘图形精确位置,这与细间距
四周引线的零部件的情况类似。
IPC-7093-7-8-cn
图7-8 评估再流前最⼤可接受偏移
ⴞḷ ਟ᧕ਇ
!
ᤂ᭦
2011年3月 IPC-7093-C
67
Copyright Association Connecting Electronics Industries
Provided by IHS under license with IPC
Not for Resale, 11/27/2015 17:57:03 MST
No reproduction or networking permitted without license from IHS
--`,`,,,,,,`,,,```,``````,`,,`,`-`-`,,`,,`,`,,`---
灰阶系统使用前照光,从下面照亮元器件。表
面特征被反馈到CCD摄像系统进行处理。二元
系统使用后照光,从上面照亮元器件。元器件
的外形被投影到CCD摄像系统处理。二元成像
是这两种方法中比较老的方法,使用黑白图像
间的对比度找 出特征。灰阶系统通常可以分析
256个层次的对比度。两个系统都是使用一种算
法来
确定元器件的中心。二元成像要求的计算
能力比灰阶成像要求的少。
灰 阶 成 像 是 根据焊盘定位来安装BTC元器件
的,而二元成像是根据BTC元器件的外形定位来
安装的。在某些情况下,BTC外形和PCB焊盘的
位置误差是比较显著的。灰阶成像对于贴装BTC
元器件是更令人满意的,因为消除了由元器件
外形变化带来的贴装误差。
贴片机吸嘴的设计因供应商不同而不同。选择
正确的吸嘴是重要的,这要求有
足够的表面积
来吸附元器件,防止贴装工艺产生任何偏移。
吸嘴必须像密封紧贴元器件,不允许有真空泄
漏。触觉感应是需要的,因为这有助于控制Z轴
(垂直)主轴的行程,防止真空吸嘴和基板间元
器件的冲击受损。
再有,由于没有引线或焊球作为卡位或支撑,
必须特别小心限制元器件Z轴压力进入焊膏,这
会导致焊料短路。
7.2.6 再流焊及其温度曲线 因为装有所有SMT
元器件,要监控新设计的板子的温度曲线。另
外,板上如果有多种封装方式的元器件,应该
测量多个位置的温度曲线。元器件的温度可能
因为环绕的元器件、在板上的位置和封装的密
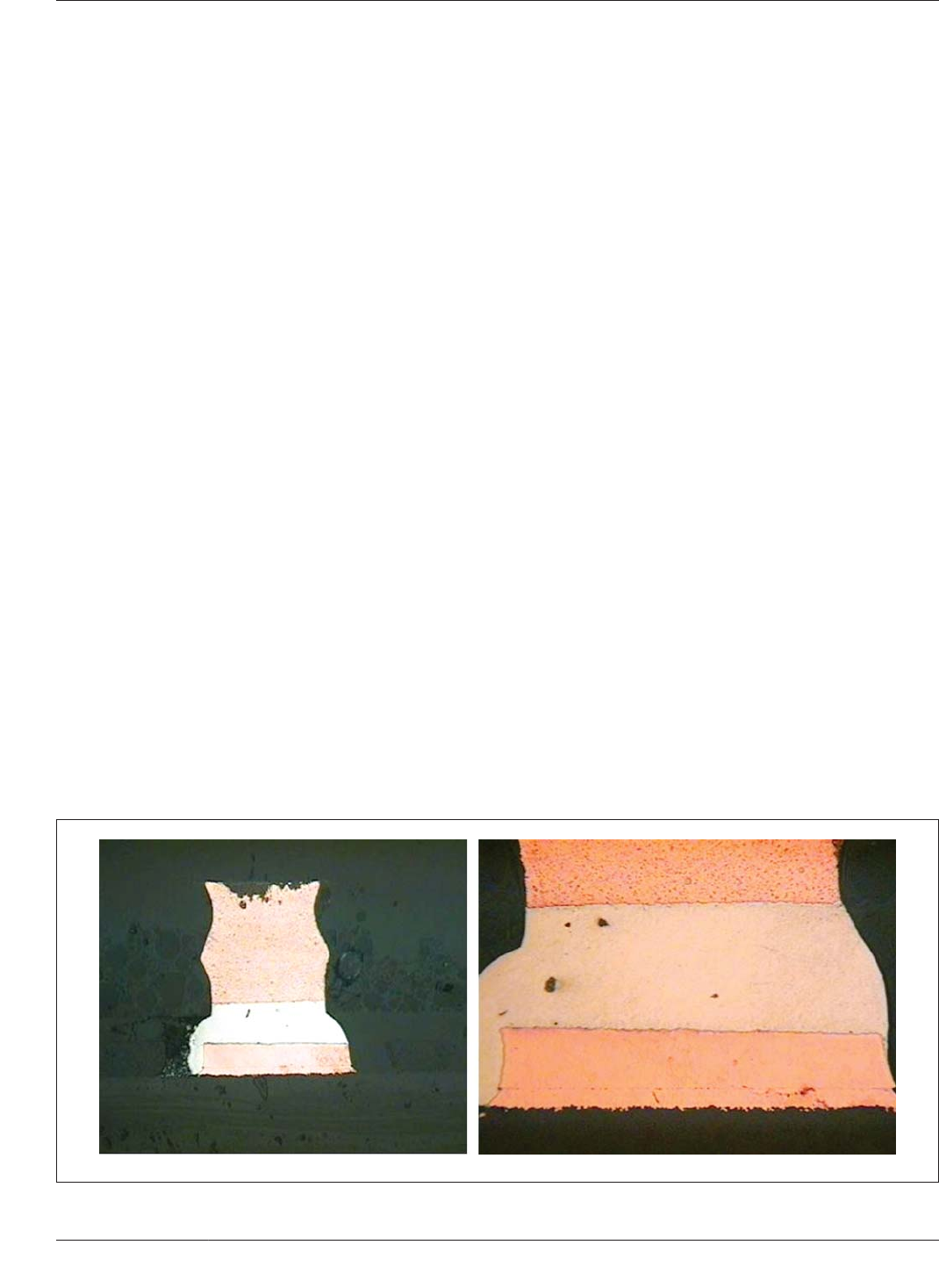
度而变化。为了使BTC元器件达到最大自我调
整的效果(见图7-9),建议不能超出焊膏规定的
最高再流温度。一个好的指导是遵从PCB温度
曲线斜率不能超出4°C/s。再流焊曲线准则是基
于实际元器件焊盘到PCB焊盘的焊点位置的温
度。
由于系
统安装热电耦位置的不同,焊点上的实
际温度常常与再流焊系统设定的温度不同。再
流焊系统要通过在PCB不同位置的热电耦得到
温度曲线。热电耦应该要装在PCB上最大和最小
的元器件上。建议大小一般的PCB上,最小零
件和最大零件的峰值温度差异不超过10°C。见J-
STD-020再流焊接建议。BTC元器件是典型的湿
敏元器件,在JEDEC中定义了其分类等级。BTC
元器件具体的等级标注在元器件湿敏标签
上。
市场上的BTC元器件要符 合锡铅和/或无铅工
艺,供应商有责任定义再流焊温度极限(例如,
最高本体温度215-245°C)。见IPC-1756。
7.2.6.1 温度曲线开发案例 焊膏印刷后,采用
无铅焊膏将BTC样品组装到要用的特定PCB上。
PCB板是一个四层多层板,厚度1.5mm,大小75
mm×95mm,通过无铅再流焊炉组装。热电耦
安 装在BTC元器件焊盘上和该 FR-4板子的底
部,并监测这些位置的温度。第三个热电
耦也
贴附在FR-4板正面用于监测再流焊炉内的环境
IPC-7093-7-9-cn
图7-9 ⾦属轮廓分明的焊盘焊点
IPC-7093-C 2011年3月
68
Copyright Association Connecting Electronics Industries
Provided by IHS under license with IPC
Not for Resale, 11/27/2015 17:57:03 MST
No reproduction or networking permitted without license from IHS
--`,`,,,,,,`,,,```,``````,`,,`,`-`-`,,`,,`,`,,`---