XPF-L 服务工程师训练手册中文版.pdf - 第119页
10. 手动降低 Z 轴,使 nozzle jig 的顶端刚刚接触到 jig 的中间 的平面( 在 mark 的附近), 如下图所示 . Nozzle jig contacts the middle level of the height jig 11. 记录 Z 轴在此高度的伺服数 . 12. 计算与 Z_BoardSurface 值之间的偏差,如下计算公式所示 . Z-axis servo count – Z_BoardSurfac…
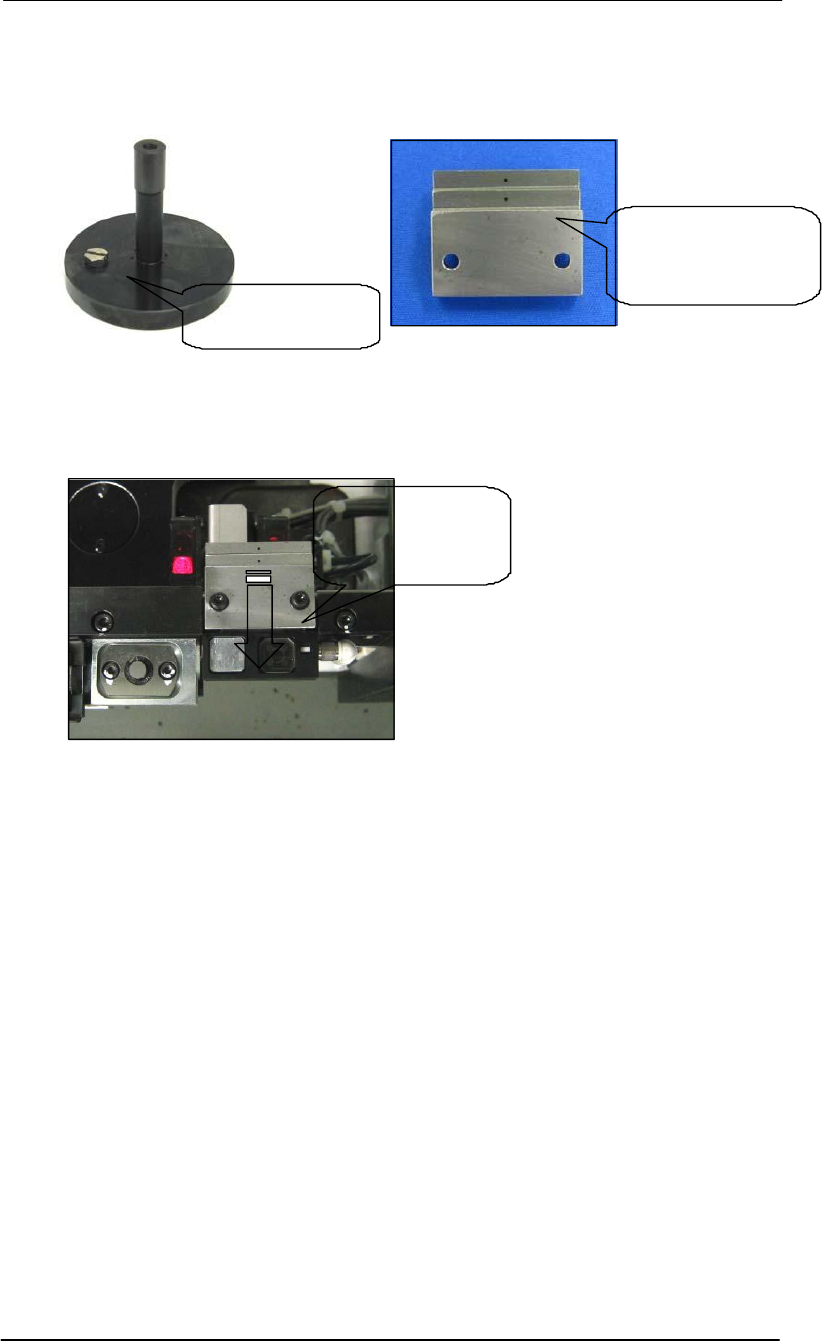
12.3 测量board height 解析度
所需工具如下:
Nozzle jig:
Z3002GGPJ0111
Board height
调整工具:
Z3002GGPJ22301
1. 选择 [Maintenance] – [Head Calibration] – [START] 执行工作头的较正.
2. 用2 x 10 mm螺丝(同时装弹簧垫和平垫),将board calibration height jig 装在hybrid jig 工作站上,如下
图:
将 此工具紧靠固
定边,并锁住螺丝
3. 开启 maintenance mode key至 ON, 并选择 [Maintenance] – [Jog] 进入保养寸动画面.
4. 选择 [Custom Maintenance] – [I/O Check] – [RY01B: VacuumPumpOn] – [ON] 启动真空泵.
5. 选择 [Y010 VacuumOff] – [OFF] ,开启吸嘴真空.
6. 将吸嘴工具接到工作头上.
7. 提升Z 轴到安全高度,以便移动X&Y轴.
8. 移动nozzle jig 到 board calibration height jig的上方.
9. 按下紧急按钮,切断200伏servo电源.
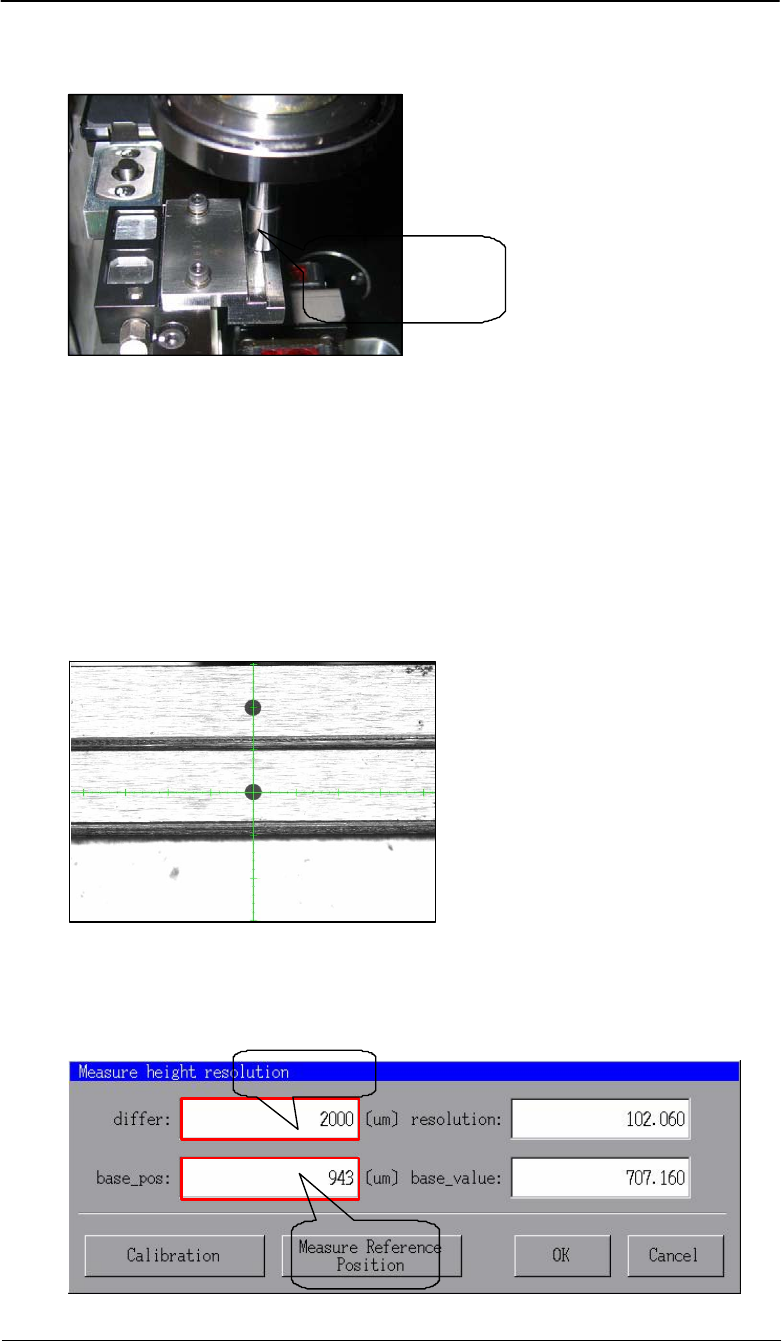
10. 手动降低Z 轴,使nozzle jig的顶端刚刚接触到jig的中间的平面(在mark的附近),
如下图所示.
Nozzle jig contacts
the middle level of
the height jig
11.记录Z 轴在此高度的伺服数.
12.计算与Z_BoardSurface值之间的偏差,如下计算公式所示.
Z-axis servo count – Z_BoardSurface = height difference
例如
: 12.1213 – 11.1783 = 0.943 (943 um)
13. 从头上拆下nozzle jig.
14. 选择 Fiducial camera ,并移至此jig中间表面mark点的中心位置,如下所示.
15. 退出寸动画面,并选择 [Maintenance] – [Measure Height Resolution],
显示 the “Measure height resolution” 对话框.
16. 输入数值,如下图:
Enter 2000
Enter step
12 value

17. 选择 [Calibration] – START校正 高度解析度.
18. 选择 [OK] – [OK] ,保存校正结果.
19. 从机器内拿出此board calibration height jig.