XP242E 系统手册 SYS-XP242-1.0S.pdf - 第136页
第 3 章 编辑器 第 3 部 XP-242E 系统手册 3-3-12 Edition 1.0 生产块数 只 生产在此指定的生产块数。输入 0 后生产 预 定数 ( 动作 模 式选择画面 ) 变 为有 效 。 (0~65000) 通 过 模 式 设定 通 过 模 式运 转 。电路板 仅仅通 过机器、 只 作为单 纯 的 搬 运 轨道而 动作。 0 : No. Pass 不 传送 1 : Pass 传送 Program Polari ty…

第 3 部 第 3 章 编辑器
Edition 1.0 3-3-11 XP-242E 系统手册
3.3 电路板编辑
电路板编辑器用于编辑贴装元件的电路板信息。
XP2S2162S
项目说明
修正量 X
以顺序输入的坐标的基准点与 FUJI 的程序坐标原点(从电路板右下角开始在 X 方向为
-5mm、Y 方向 为+5mm 的坐标 )不同时,有必要设定修正值。请输入从电路板上 FUJI
的原点到输入坐标数据的基准点的 X 方向的 修正值。(-600.00mm~600.00mm)
修正量 Y
以顺序输入的坐标的基准点与 FUJI 的程序坐标原点(从电路板右下角开始在 X 方向为
-5mm、Y 方向 为+5mm 的坐标 )不同时,有必要输入修正值。请输入从电路板上 FUJI
的原点到输入坐标数据的基准点的 Y 方向的 修正值。(-600.00mm~600.00mm)
电路板 X
设定电路板的 X 方向尺寸。(80.00mm~457.00mm)
电路板 Y
设定电路板的 Y 方向尺寸。(50.00mm~356.00mm)
销距
输入基准孔(销)和从属孔(销)之间的距离。(0.0~457.0)

第 3 章 编辑器 第 3 部
XP-242E 系统手册 3-3-12 Edition 1.0
生产块数
只生产在此指定的生产块数。输入 0 后生产预定数(动作模式选择画面)变为有效。
(0~65000)
通过模式
设定通过模式运转。电路板仅仅通过机器、只作为单纯的搬运轨道而动作。
0:No. Pass 不传送
1:Pass 传送
Program Polarity
设定是否使用基准化程序手法(Polarity 功能)。
0:No 不使用 (当前不支持。如果设定的话,会出错而不能开始生产。)
1:Ye s 使用
详细情况请参考[Polarity 功能]。
定位点的错误识别检查范围
设定各个定位点的错误识别检查范围的公差。(0.0~10.0)
定位点间距偏差的公差范围
设定定位点间距偏差的公差范围。(0.0~10.0)
备用电路板名称 (当前不支持。)
输入备用电路板名称。
软着陆速度
用%来指定 Z 轴的动作速度。(0.0%~10.0%)
例) 速度=75[mm/sec]×设定值/10
第 3 部 第 3 章 编辑器
Edition 1.0 3-3-13 XP-242E 系统手册
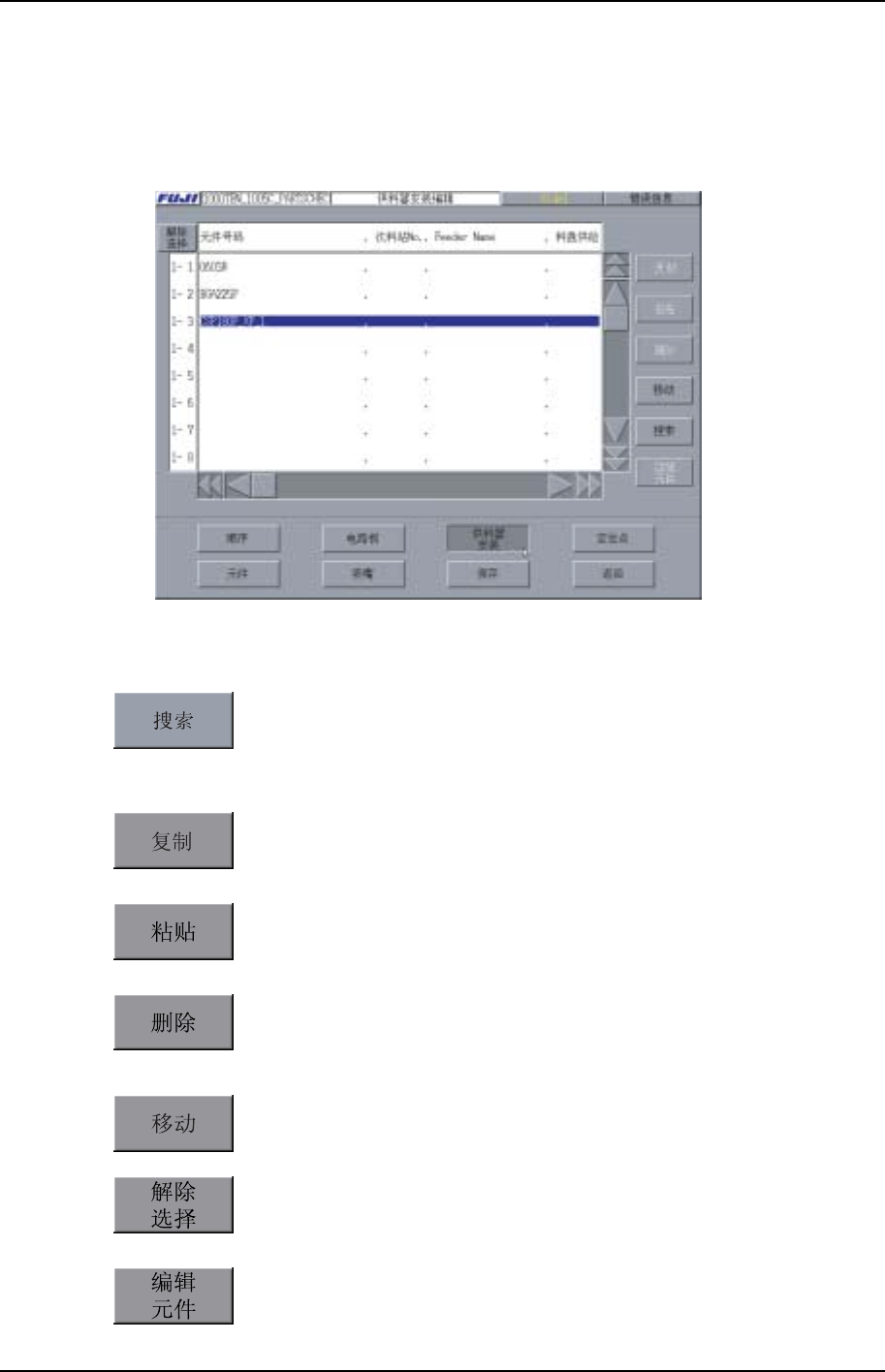
3.4 供料器安装的编辑
供料器安装的编辑用于设定在哪个料站安装哪个元件的信息的编辑器。
XP2S2163S
操作键说明
以下所示按下键是对于位于画面左侧领域所选择的行进行处理:
在供料器内搜寻指定的字符串或数据。
复制所选择行的数据到剪贴板上。
在所选择行之前插入剪贴板上的数据。
删除所选择行并将后面的行自动上移。
可以移动或更换供料器位置。
解除所有的选择。
在元件编辑画面中所选择的行上编辑贴装的元件。