XP242E 系统手册 SYS-XP242-1.0S.pdf - 第156页
第 3 章 编辑器 第 3 部 XP-242E 系统手册 3-3-32 Edition 1.0 Pick-up Point Offs et X 不 想 从指定料 站 的 X 方向的中 心 处 吸取供料器供 应 的元件时用此设定。设定修正量时 的元件方向以 Dire ction 0 为基准。要设定向右 偏 移 5mm 时请输入“ 5 ” 。 (-12.7mm~12.7mm) MCSX335S Pick-up Point Offset Y …

第 3 部 第 3 章 编辑器
Edition 1.0 3-3-31 XP-242E 系统手册
Lead Center Tolerance
请输入引脚弯曲度的公差值。(0.000mm~99.999mm)
输入[0]后自动设定为引脚长度的 30%。
但是,只可在 Vision Type 为 100,230,231 时使用。
P Pattern
是定义引脚的反射方式的数据。(0~255)
Vision Type 是 100 (OF&CONNECTOR:前光处理) 时,请输入 14,引脚较暗背景
较亮时请输入 13。
Vision Type 为 230,231 (BAG 元件处理:前光处理,Body 黑色) 时、请输入 2。
上述以外的 Vision Type 中,不 参考 P Pattern。
Result
输入 BGA 元件 (仅在 Vision Type 为 230,231 时有效) 的焊球网格行列时设定为 128。
在 XP 上仅用于判断是否为行列输入。
(0~255)
Process
Maximum Nozzle Diameter
吸取对象元件时使用,输入元件的最大直径。
(0.0mm~99.9mm)
Minimum Nozzle Diameter
吸取对象元件时使用,输入元件的最小直径。
(0.0mm~99.9mm)
Nozzle Name
要使用特定的吸嘴时,从名称目录中选择。(最大 15 字符)
Pick-up Auto Offset
设置是否使用吸取点自动修正功能。
YES: 使用吸取点自动修正功能 :0
NO: 不使用吸取点自动修正功能 :1
Part Pick-up Check
设定吸取错误被识别出时机器的动作。
NO:与下面的Recover 相同。 :0
STOP: 若不吸取的话机器停止。:1
Recover:指出错次数达到 Recover Time 设定 值时,机器停止。 :2
Recover Time 为 0 时,为[维修保养 A]→[模式选 择]画面的补件次数。
第 3 章 编辑器 第 3 部
XP-242E 系统手册 3-3-32 Edition 1.0
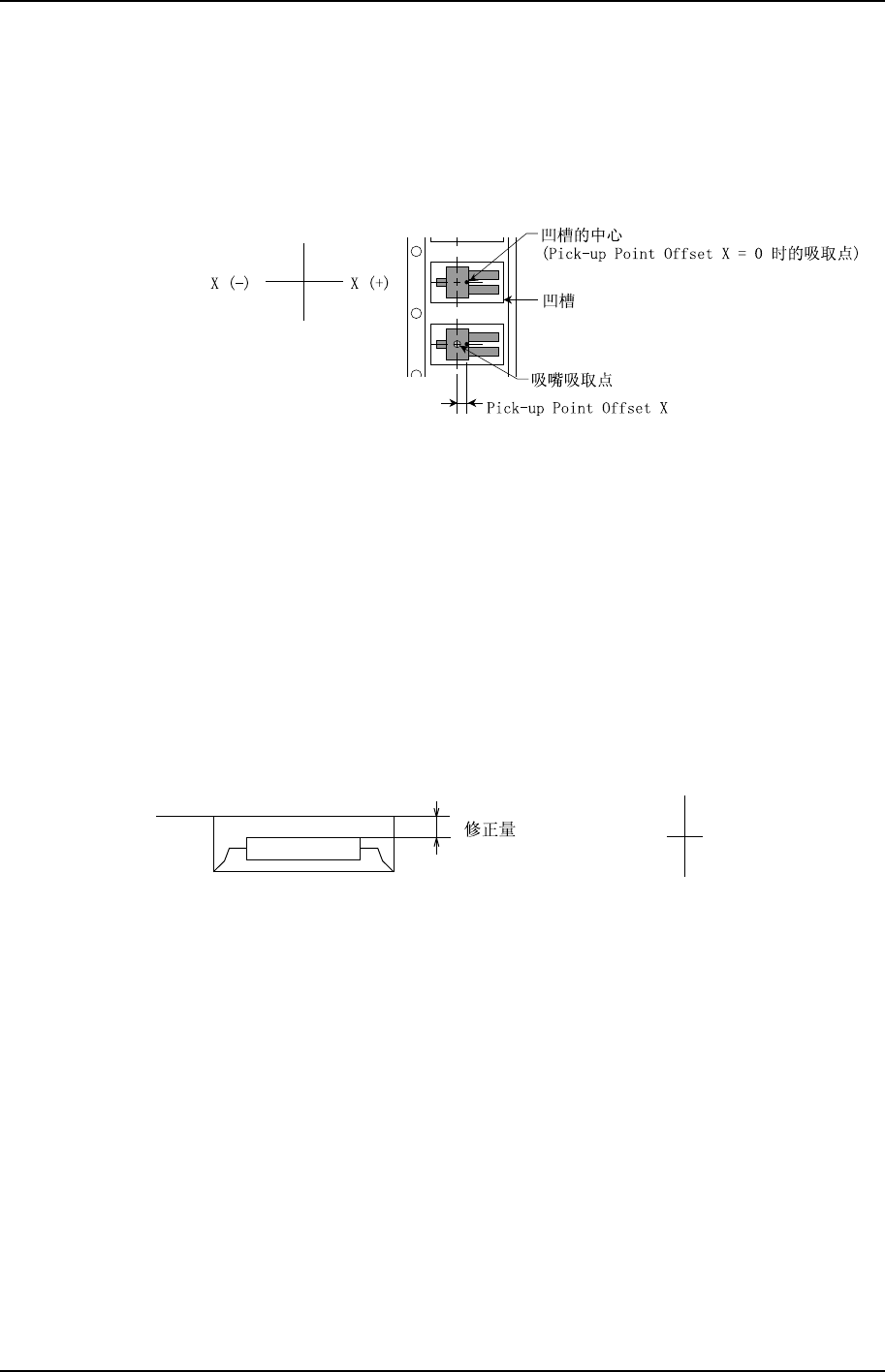
Pick-up Point Offset X
不想从指定料站的 X 方向的中心处吸取供料器供应的元件时用此设定。设定修正量时
的元件方向以 Direction 0 为基准。要设定向右偏移 5mm 时请输入“5”。
(-12.7mm~12.7mm)
MCSX335S
Pick-up Point Offset Y
不想从指定料站的 Y 方向的中心处吸取供料器供应的元件时用此设定。设定修正量时
的元件方向以 Direction 0 为基准。要设定内偏移 5mm 时请输入“5”。
(-12.7mm~12.7mm)
Pick-up Point Offset Z
不想从指定料站的通常高度吸取供料器供应的元件时用此设定。要向下修正 1mm 时请
输入“-1”。(-12.7mm~12.7mm)
MCSX336S
Z (+)
Z (-)
Soft Pick Speed
为减轻进行吸取动作时对元件造成的冲击,而设定 Z 轴下降和上升的速度。值越小速度
越慢。输 入 0 时,机器判断为 10.0。吸取时取这个输入值和 Slow Place Speed 两者中
较慢的数据为有效值。吸取元件期间、Part Transport Speed 也需考虑,取这些数据
中最慢的速度为有效值。(0.0~10.0)
Pick-up Orientation Q
若元件用特殊吸嘴和机械夹 头等吸取时必须预先转动吸嘴的元件,则输入这个数据。
(0.0~359.99)
被吸取的元件基准方向是前述的 Direction 0。

第 3 部 第 3 章 编辑器
Edition 1.0 3-3-33 XP-242E 系统手册
Tray Pick Offset Z
元件的吸取面与料盘上表面的的高度不同时,设定吸取时 Z 方向的修正 量。(-25.4~12.7)
MCSX337
Z (+)
(-)
Tray Shuttle speed
料盘在料盘单元以及料盘往复臂中的移动速度从下列选项中选择。
Hi :4 快
Mid :3 ↑
Lo :2 ↓
Ulo :1 慢
Part Transport Speed
对于较重元件,根据从吸取到贴装之间的传送速度有可能使吸嘴产生偏移。为防止因传
送速度过快引起偏移。在此设定的速度适用于机器在持有元件期间的全部的伺服 轴的速
度。将输入“0”时作为 100%,在吸取元件期间,此 值和 Soft Pick Speed、Slow Place
Speed、Soft Place Speed 中的最 慢的速度为有效(0%~100%)。
Placing Offset X
以 Direction 为 0 并 且 贴装角度 为 0 ° 作为基准设定 X 方向的贴装修正量。(-
100.00mm~100.00mm)
Placing Offset Y
以 Direction 为 0 并 且 贴装角度 为 0 ° 作为基准设定 Y 方向的贴装修正量。(-
100.00mm~100.00mm)
Placing Offset Z
设定贴装时将元件压 在电路板上时的冲 程量。以 0 输入时仅 压 下 0.3mm 。 (-
20.00mm~20.00mm)