XP242E 系统手册 SYS-XP242-1.0S.pdf - 第151页
第 3 部 第 3 章 编辑器 E d i t i o n 1 . 0 3 - 3 - 2 7 X P - 2 4 2 E 系统手册 Part Height 请输入元件 高度 ( 厚 度 : 吸嘴的吸取面到元件 底 部为 止 ) 。此 高度 包 括引脚 的 长 度 。 (0.01mm~25.40mm) 请 参考 下 图 。有关“ Pickup Point Offset Z ”以及“ Placing Offset Z ”在以后 叙 述 。…

第 3 章 编辑器 第 3 部
XP-242E 系统手册 3-3-26 Edition 1.0
项目检查是搜索并显示指定的数据名称。选 择 黑色下拉键显示分类目录,也可以直接从
键盘输入数据
名称来搜索。选择[下一步搜索]键以从上至下的方向进行搜索。
项目说明
Part Type Name
以最大 30 字符的文字串指定元件种类名。
注意) 以下字符不能用于文件名:(:¥ / ; * ? ” < > /),另外,在文件名的开头也不能用字符(~.)。
Part Type Name 数据由以下 6 种类型构成。
·Body
·Lead
·Element
·Process
·Vision
·Coplanarity
Body
Body Length (X)
设定元件的基本形状的 X 轴方向总长度。(0.01mm~150.00mm)
进行影像处理的相机位置是 Find,使用侧灯时请输入 20.00 以下的数字。
Body Width (Y)
设定元件的基本形状的 Y 轴方向总长度。(0.01mm~150.00mm)
进行影像处理的相机位置是 Find,使用侧灯时请输入 20.00 以下的数字。
Body Length Tolerance
设置元件主体 X 方向的尺寸公差。Vision Type 为 10 (Rect) (2125、3216 等无引脚的
元件) 以此值输入,其它的 Vision Type (SOP 或 QFP 等的带有引脚的元件) 无须输入
此值。另外,检测出的元件尺寸超出公差值时,即出现公差值错误。还有,输入值通常
为元件主体尺寸的 10%。(0.00mm~9.99mm)
Body Width Tolerance
设置元件主体 Y 方向的尺寸公差。Vision Tyoe 为 10 (Rect) (2125、3216 等无引脚的
元件)时请输入此项目。另外,检测出的元件尺寸超出公差值时,即出现公差值错误。
还有,输入值通常以元件尺寸尺寸的 10%为基准。 (0.00mm~9.99mm)
第 3 部 第 3 章 编辑器
Edition 1.0 3-3-27 XP-242E 系统手册
Part Height
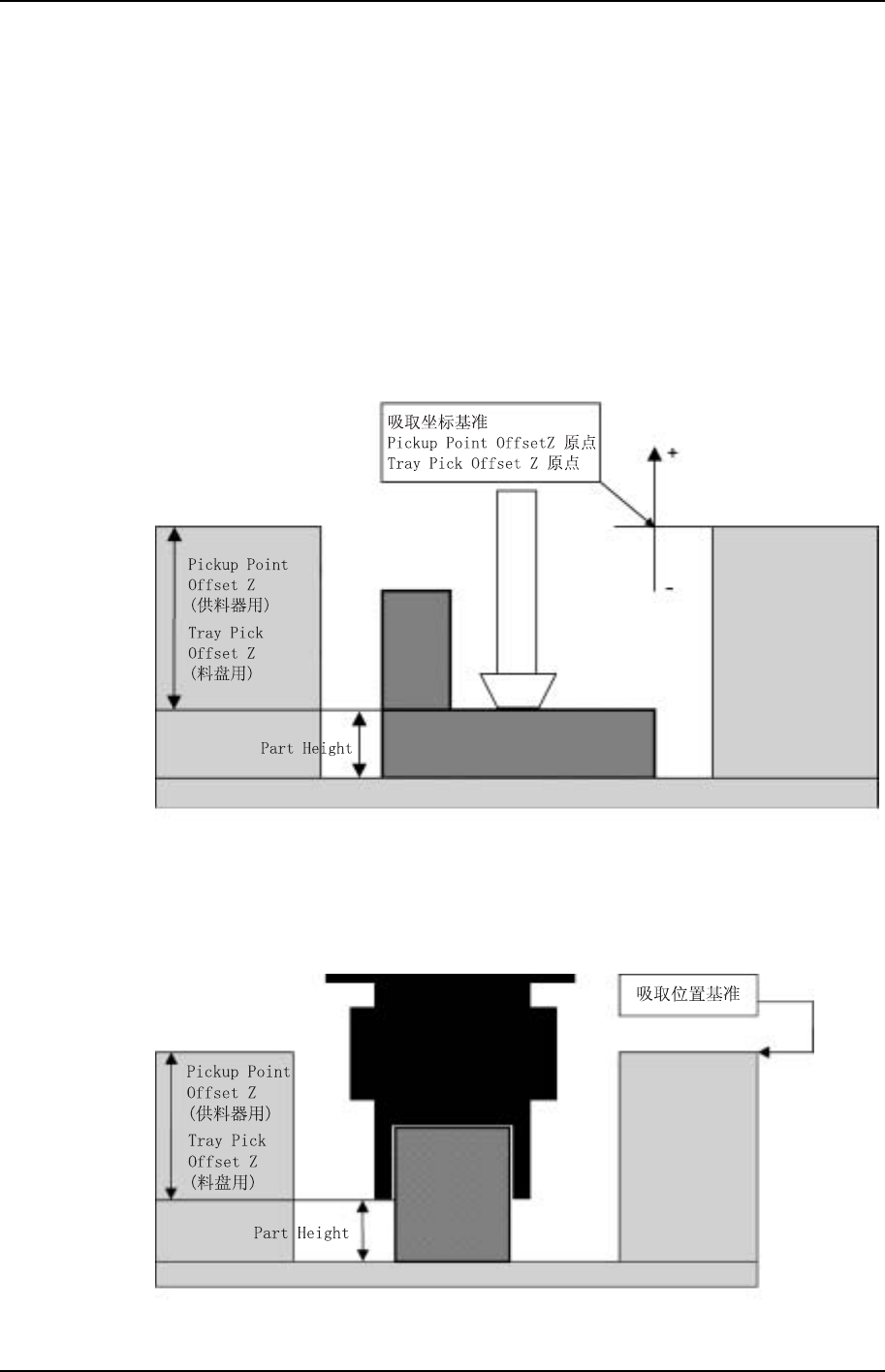
请输入元件高度(厚 度 : 吸嘴的吸取面到元件底 部为止 ) 。此高度包括引脚的 长 度 。
(0.01mm~25.40mm)
请参考下图。有关“Pickup Point Offset Z”以及“Placing Offset Z”在以后叙述。
<料带/料盘的时候>
※ 料带及料盘的上表面为吸取基准位置。
※ 吸取时的 Z 轴高度。
(料带的时候) 吸取位置基准+Pick-up Point OffsetZ
(料盘的时候) 吸取位置基准+Tray Pick OffsetZ
MCSX330S
<机械夹头>
用机械夹头处理的元件时,如下图请设定 Part Height 为从机械夹头前端到元件下表面
的距离。
XP2S2234S
第 3 章 编辑器 第 3 部
XP-242E 系统手册 3-3-28 Edition 1.0
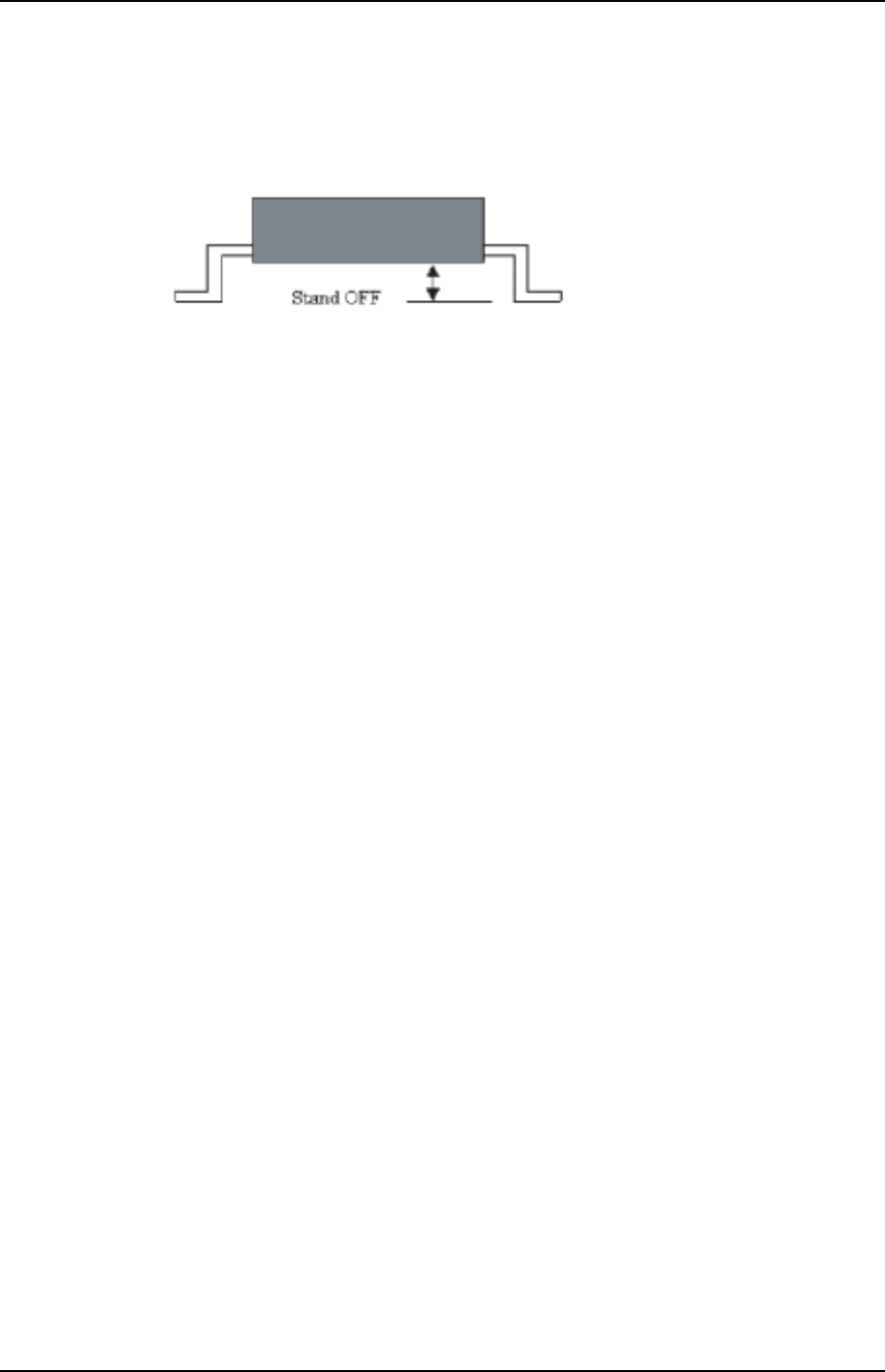
Stand off
是指从引脚元件的电路板上表面到元件主体下表面的距离。(0.00mm~25.40mm)
只在检查引脚垂直弯曲度的元件时需要设定。
XP2S0035
Lead
Pitch Tolerance
设定引脚间距的公差范围。(0%~100%)
Vision Type 100 时支持。
设定值是 0%时,默认为输入 30%。
Measure Point Of Lead
对于引脚长度,设定从引脚端部到多少%的位置进行影像处理。但是,当输入为 0 时,
对距离引脚端部 20%的位置进行处理。只有 Vision Type 为 20,100 时能使用。
(0%~100%)