XP143系统手册.pdf - 第248页
4. 机器生产程序 SYS-XP143-1.0S 236 XP-142E/143E 系统手册 Pick-up Poi nt Offse t Y 在供料器供应的元件时不 想从指定料站的 Y 方向的中心处吸 取元件时用此设定。(-12.7mm ~ 12 .7mm) 设定修正量时的元件方向以 Direction 0 为基准。要设定向进深处偏移 5mm 时请输入 “5” 。 Pick-up Poi nt Offse t Z 在供料器供应的元件时…
SYS-XP143-1.0S 4. 机器生产程序
XP-142E/143E 系统手册 235
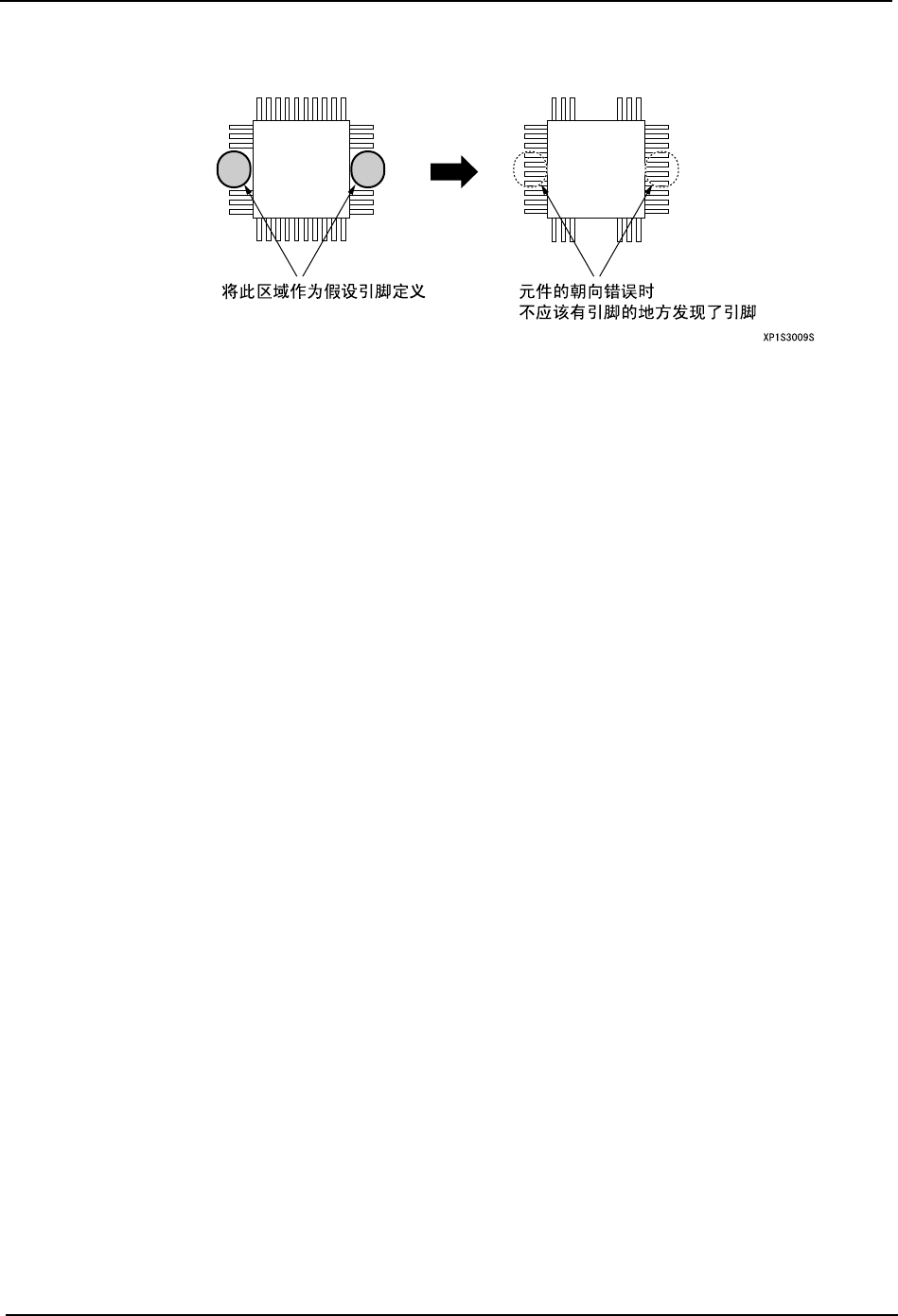
方向检查时也可以使用。在进行此项检查时,在 Virtual lead 中进行选择。显示出 「2」。
行列输入的第 2 行 (Matrix)
仅仅对应 Vision Type230。
进行 BGA·CSP 元件的焊球矩阵的行列输入时,使用 2 个 Element Data 的组合进行使用。
因此,在第 1 行输入 [1], 在第 2 行为了表示 Element Data 的第 2 行,请输入 [128]。
备注 ) 检查项目的选项使用时的功能输入时,请在 Element Data 的第 1 行输入 (加上 1 的数值)。
Vision Type19 时,有必要定义锡球要素。
Part Positioning Mode
设定将影像处理的结果用模板定位还是用要素定位。
Vision Type19 的时候
0:Template Positioning 仅仅用模板定位。
1:Element Positioning 仅仅用要素定位。
·Process
Maximum Nozzle Diameter
吸取对象元件时使用,输入元件的最大直径。(0.0mm ~ 99.9mm)
Minimum Nozzle Diameter
吸取对象元件时使用,输入元件的最小直径。(0.0mm ~ 99.9mm)
Nozzle Name
要使用特定的吸嘴时,从名称目录中选择。( 最大 15 字符 )
Pick-up Auto Offset
设置是否使用吸取点自动修正功能。
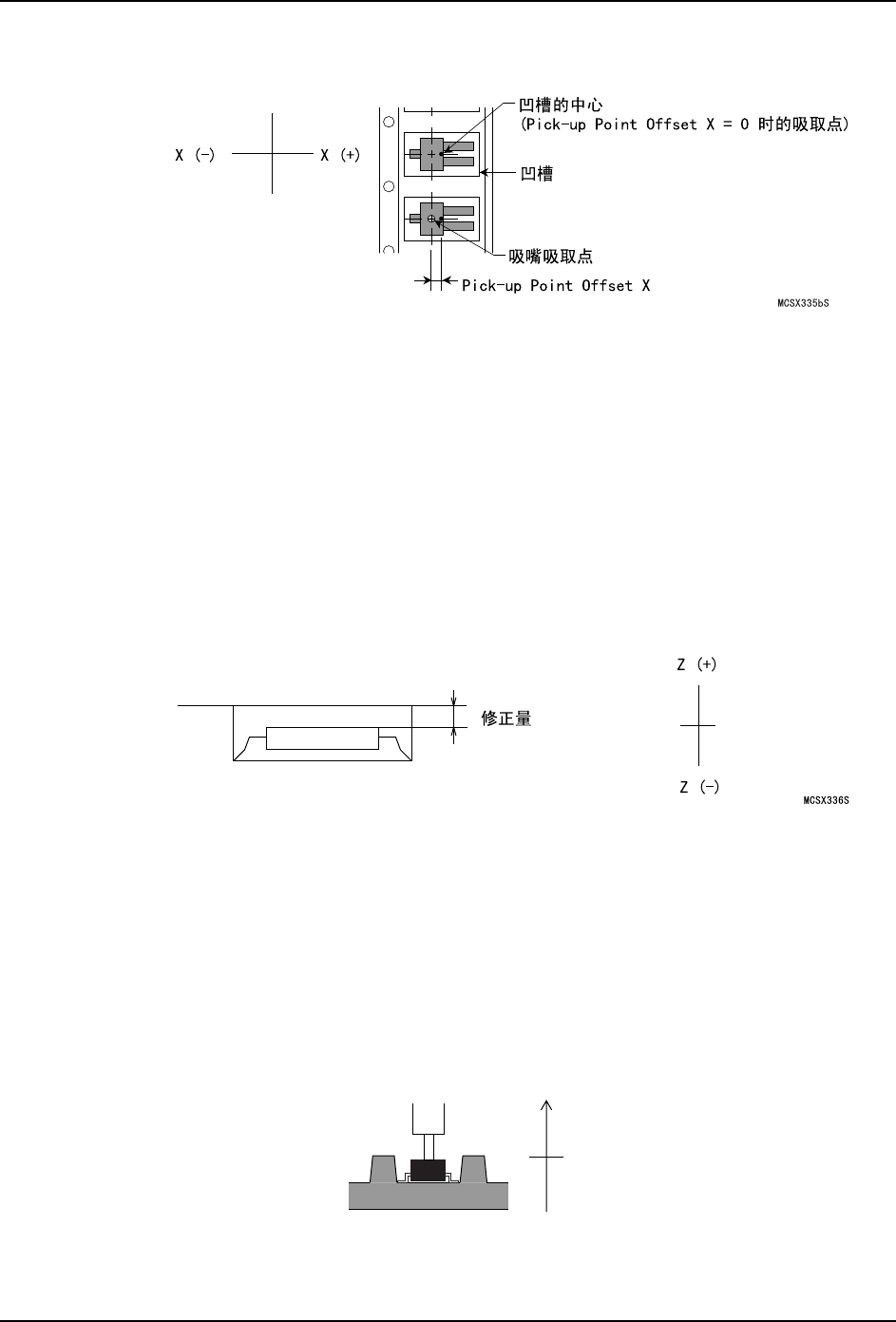
Pick-up Point Offset X
在供料器供应的元件时不想从指定料站的 X 方向的中心处吸取元件时用此设定。(-12.7mm
~ 12.7mm)
设定修正量时的元件方向以 Direction 0 为基准。要设定向右偏移 5mm 时请输入 “5”。
YES: 使用吸取点自动修正功能 :0
NO: 不使用吸取点自动修正功能 :1
4. 机器生产程序 SYS-XP143-1.0S
236 XP-142E/143E 系统手册
Pick-up Point Offset Y
在供料器供应的元件时不想从指定料站的 Y 方向的中心处吸取元件时用此设定。(-12.7mm
~ 12.7mm)
设定修正量时的元件方向以 Direction 0 为基准。要设定向进深处偏移 5mm 时请输入
“5”。
Pick-up Point Offset Z
在供料器供应的元件时不想从指定料站的通常高度吸取元件时用此设定。(-12.7mm ~
12.7mm)
要向下修正 1mm 时请输入 “-1”。
Soft Pick Speed
为减轻进行吸取动作时对元件造成的冲击,而设定 Z 轴下降和上升的速度。(0.0 ~ 10.0)
值越小速度越慢。输入 0 时,机器判断为 10.0。吸取时取这个输入值和 Slow Place Speed
两者中较慢的数据为有效值。吸取元件期间,Part Transport Speed 也需考虑,取这些数
据中最慢的速度为有效值。
Tray Pick Offset Z
元件的吸取面与料盘上面的高度不同时,设定吸取时的 Z 方向的修正。(-5.0 ~ 1.0mm)
注意 ) 仅仅在单料盘平台 (选项)贴装时显示。
MCSX337
Z (+)
(-)

SYS-XP143-1.0S 4. 机器生产程序
XP-142E/143E 系统手册 237
Part Transport Speed
对于较重元件,根据从吸取到贴装之间的传送速度有可能使吸嘴产生偏移。为防止因传送
速度过快引起偏移。(0% ~ 100%)
在此设定的速度适用于机器在持有元件期间的全部的伺服轴的速度。将输入 “0”时作为
100%,在吸取元件期间,此值和 Soft Pick Speed、Slow Place Speed、Soft Place Speed
中的最慢的速度为有效。
Placing Offset X
以 Direction为0并且贴装角度为0°作为基准设定X方向的贴装修正量。(-100.00mm ~
100.00mm)
Placing Offset Y
以 Direction为0并且贴装角度为0°作为基准设定Y方向的贴装修正量。(-100.00mm ~
100.00mm)
Placing Offset Z
设定贴装时将元件压在电路板上时的冲程量。以 0 输入时仅压下 0.3mm。(-20.00mm ~
0.00mm)
Placing Mode
指定移向元件贴装坐标时各伺服轴的到达精度。当选择重视贴装速度时选 2,重视贴装精
度时选 1。
Slow Place Speed
设定从吸取到贴装过程中 Z 轴上升和下降的速度。(0% ~ 100%)
减轻吸取或贴装时对元件的冲击。值越小速度越慢。输入 0 时,机器判断为 100。吸取时
取这个值和 Soft Pick Speed 两者中较慢的数据为有效值。吸取元件期间、Part Transport
Speed 也需考虑,取这些数据中最慢的速度为有效值。贴装时这个值和 Soft Place Speed
中较慢的速度进入有效状态。吸取元件期间、Part Transport Speed 也需考虑,取这些数
据中最慢的速度为有效值。
Soft Place Speed
设定贴装时 Z 轴下降和上升的速度。(0.0 ~ 10.0)
减轻贴装时对元件的冲击。值越小速度越慢。输入 0 时,机器判断为 10.0。贴装时取这个
值和 Slow Place Speed 两者中较慢的数据为有效值。吸取元件期间、Part Transport
Speed 也需考虑,取这些数据中最慢的速度为有效值。
Alt. Feed Trigger
生产程序中的供料器安装中设定了次料粘时,设定在什么条件下移动至次料站。
这个设定可通过固有值文件的项目 “__ DchangeTrigger”来选择。选择 3 时,元件数据在
Alt. Feeder Trigger 中的设定值进入有效状态。这时从以下选项中选择适当的条件。
Standard:0 Vision Type 不到 100 时,以低精度模式进行贴装。Vision Type 在
100 以上时,以高精度模式进行贴装。
Fine-Slow:1 以高精度模式进行贴装。
Fine-Fast:2 以低精度模式进行贴装。