3OM-1602-004_w.pdf - 第187页
3OM-1602 2-24 第二章 2. 补正 ( 补正值 ) 数据 [3] 直交角度 X[ ° ] 表示对装置基准坐标系的 X 方向的装置上标记的 X 方向的角度偏离量。 在装置上确认不易受温度影响的 3 点标记,调整横梁 XY 轴垂直,以求 保证实际贴装精度。 Xm(+) Ym(+) Yb(+) Xb(+) Yb(+) Xb(+) Xm' 装置基准坐标系 标记坐标系 横梁坐标系 装置上的标记 直交角度X 安装头原点 Pm.…
3OM-1602
第二章 2. 补正 ( 补正值 ) 数据
2-23
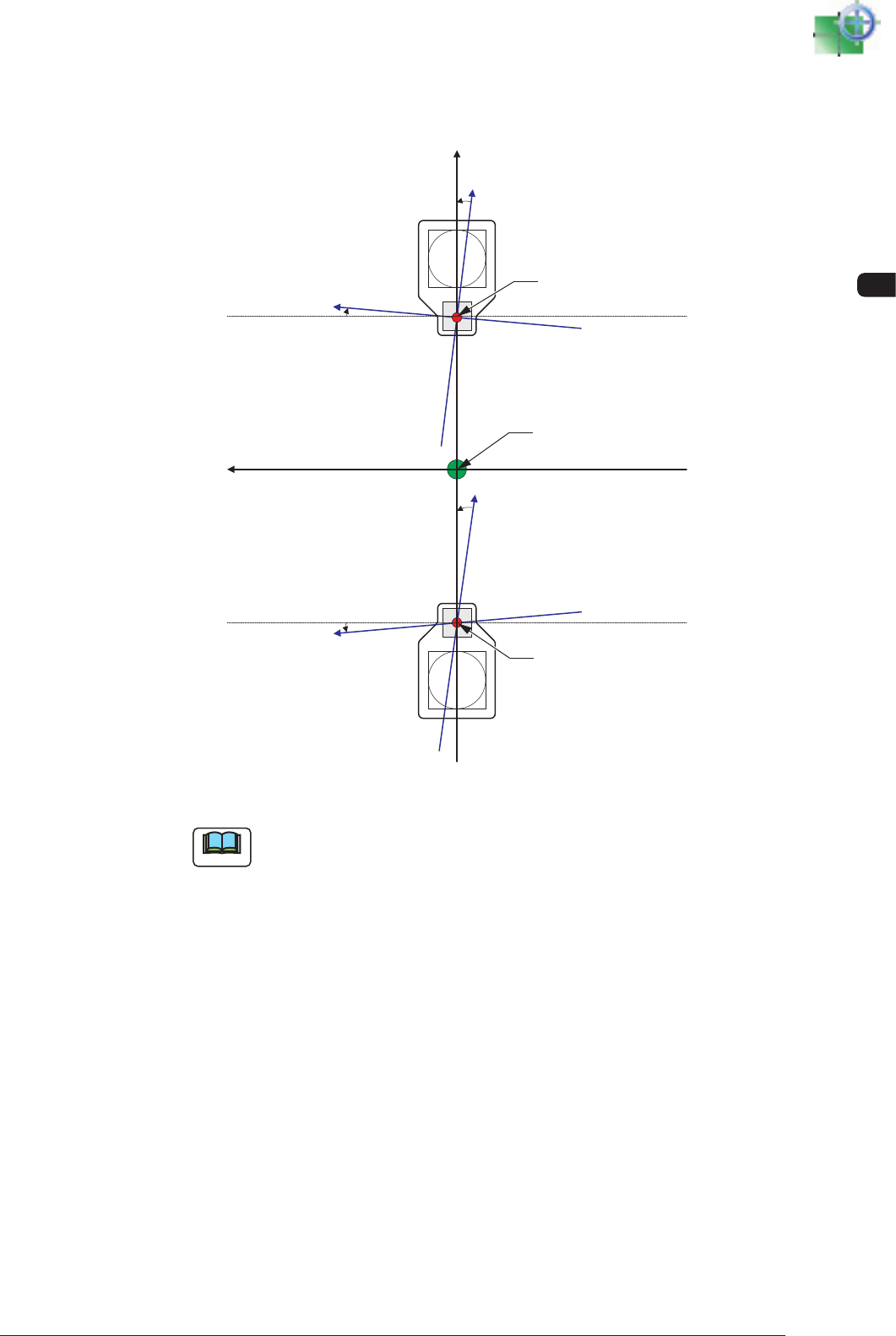
[2] 角度 X、角度 Y[
°
]
将横梁 X 及 Y 轴对准装置基准坐标系的数据。
Xm(+)
Ym(+)
Yb(+)
Xb(+)
Yb(+)
Xb(+)
Xm-Ym : 装置基准坐标系
Xb-Yb : 实际横梁坐标系
安装头原点
Pm.装置基准坐标原点
安装头原点
F3B19
Note
以装置基准坐标系为基准实际横梁坐标系往逆时针方向倾斜时,横梁
角度补正值设为
“
+
”
。
1008-002
3OM-1602
2-24
第二章 2. 补正 ( 补正值 ) 数据
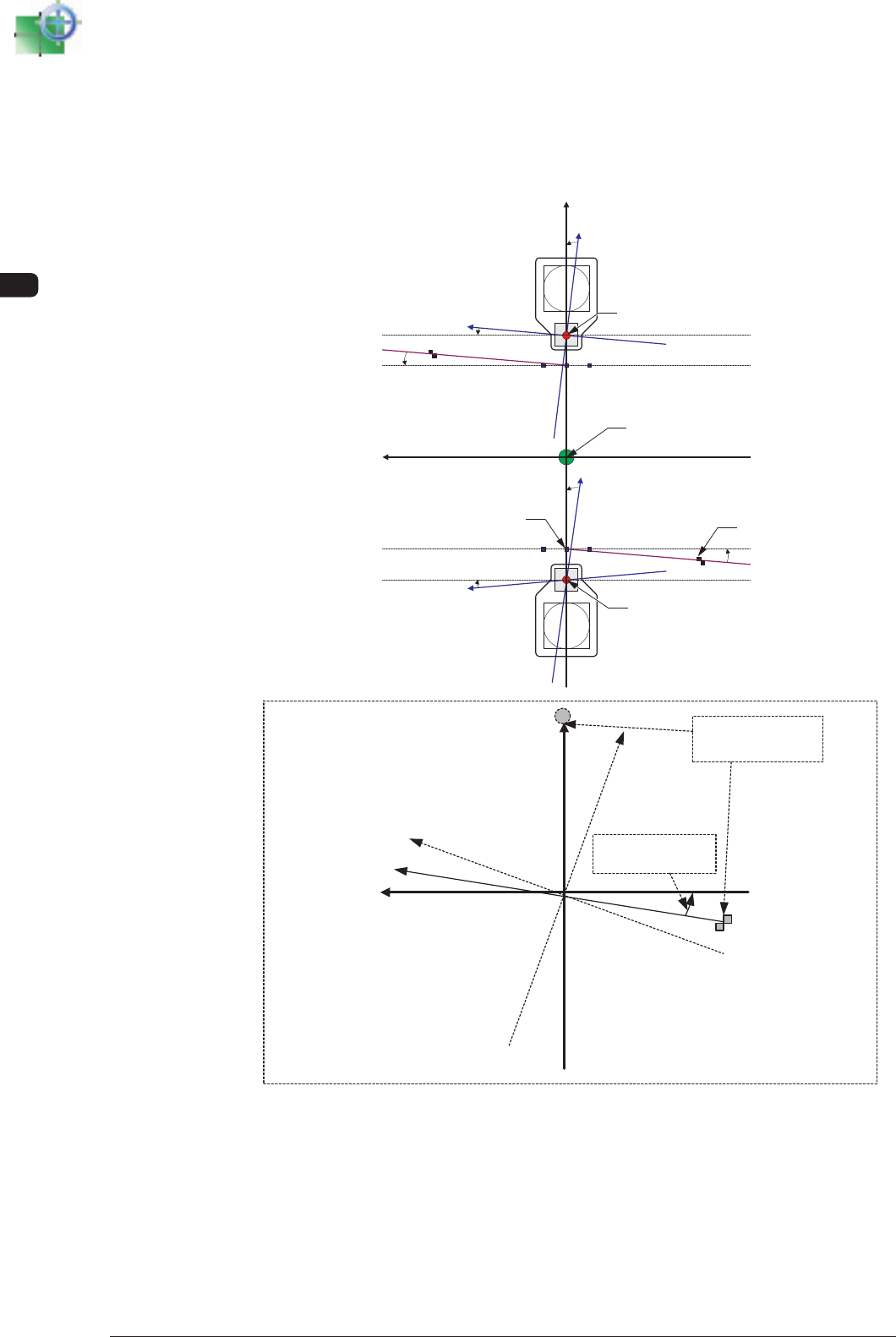
[3] 直交角度 X[
°
]
表示对装置基准坐标系的 X 方向的装置上标记的 X 方向的角度偏离量。
在装置上确认不易受温度影响的 3 点标记,调整横梁 XY 轴垂直,以求
保证实际贴装精度。
Xm(+)
Ym(+)
Yb(+)
Xb(+)
Yb(+)
Xb(+)
Xm'
装置基准坐标系
标记坐标系
横梁坐标系
装置上的标记
直交角度X
安装头原点
Pm.装置基准坐标原点
基准标记2
安装头原点
Xm-Ym : 装置基准坐标系
Xb-Yb : 实际横梁坐标系
基准标记1
F3B20
1103-003
3OM-1602
第二章 2. 补正 ( 补正值 ) 数据
2-25
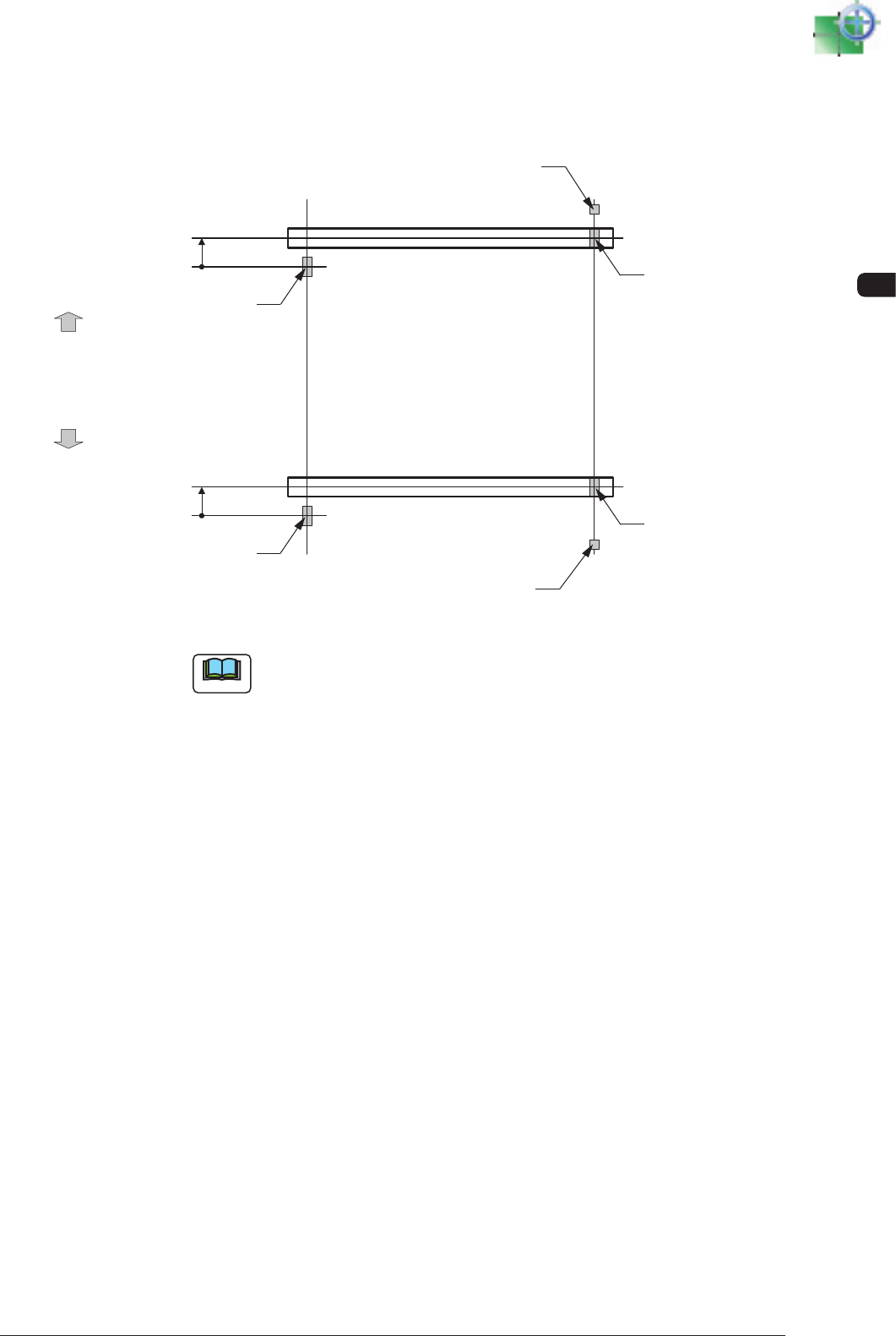
[4] XY 轴原点 1、2
为了保持装置组装后的横梁状态 ( 位置 ) 的补正值。执行动态控制器
的 Y 轴原点复位 ( 调整模式 ),使用从动态控制器自动返回的值。
主动侧
从动侧
原点标记
(原点信号位置)
横梁
横梁
原点复位方向
原点复位方向
Y 轴原点补正值=(+)值
溢位传感器
Y 轴原点补正值=(+)值
原点标记
(原点信号位置)
原点标记
(原点信号位置)
原点标记
(原点信号位置)
溢位传感器
F3B21
Note
(a) 该补正值只显示,不能手动输入。
(b) Y 轴原点补正值说明从从动轴的原点信号位置看向原点复位方向
时,主轴的原点信号位置在哪里。与原点复位方向一致时为
“
+
”
,
与原点复位方向相反时为
“
-
”
。
[5] [ 返回 ] 按钮
返回到
“
补正值数据
”
界面。
[6] [ 适用 ] 按钮
适用输入的数据。
[ 取消 ] 按钮
取消输入的数据,恢复保存的数据。
1201-003