3OM-1602-004_w.pdf - 第221页
3OM-1602 2-58 第二章 2. 补正 ( 补正值 ) 数据 2.9.1 元件认识 ( 识别 ) 照相机 F3B51 [1] X( 横 )、Y( 纵 )[mm] 调整对装置基准坐标系原点到元件识别照相机中心的设计尺寸的位置 偏离。 Xm(+) Ym (+) Xm-Ym : 装置基准坐标系 Xc-Yc : 元件识别照相机坐标系 Xc(+) Yc(+) Xc(+) Yc(+) 元件识别照相机中心 元件…
3OM-1602
第二章 2. 补正 ( 补正值 ) 数据
2-57
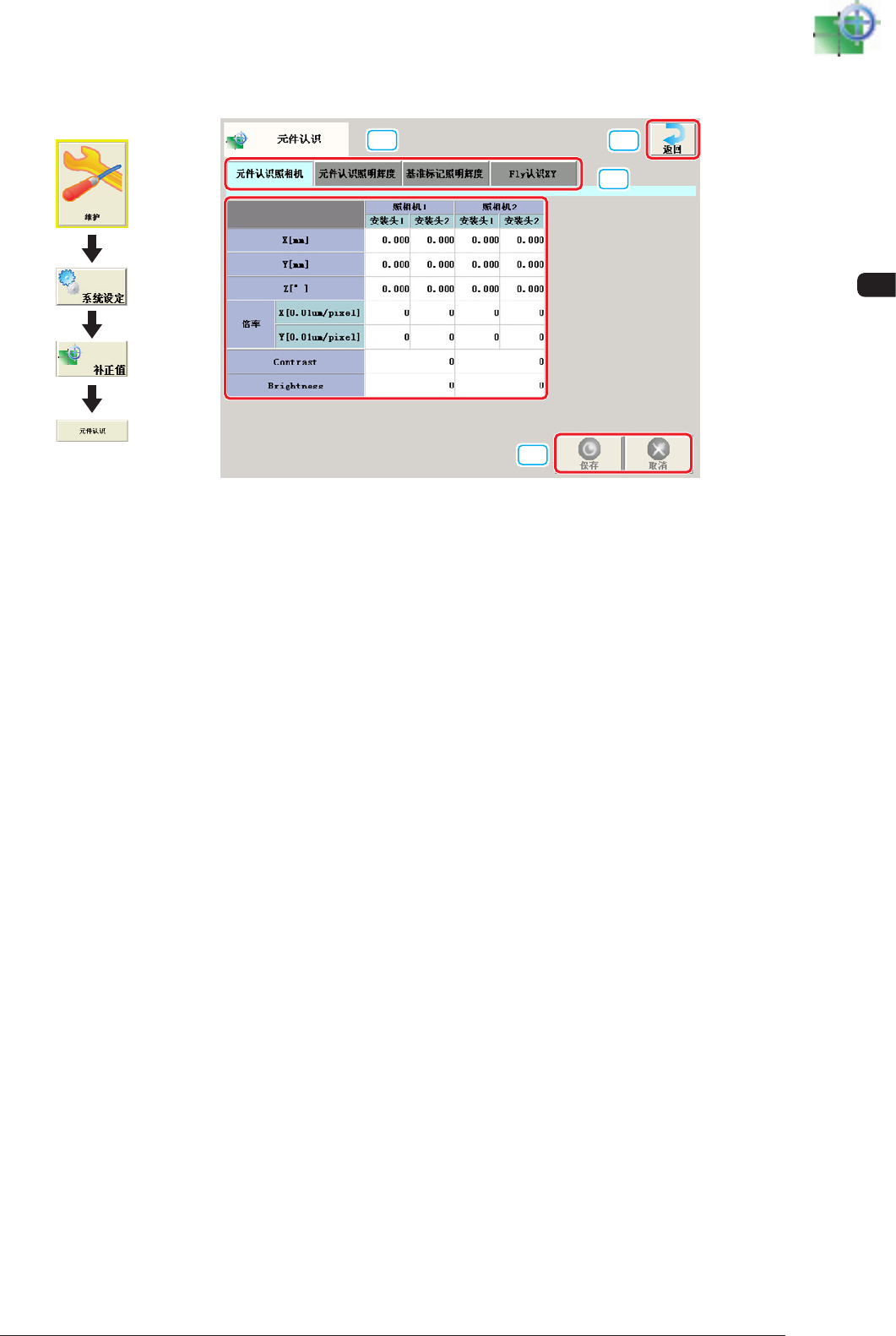
2.9 元件认识 ( 识别 )
[1]
[2]
[3]
[4]
F3B50
[1] 补正值选择 Tab
显示选中 Tab 的补正值数据。
[2] 补正值数据显示部
显示 [1] 中选择的补正值数据。
[3]
[ 返回 ] 按钮
返回到
“
补正值数据
”
界面。
[4] [ 保存 ] 按钮
保存输入的数据。
[ 取消 ] 按钮
取消输入的数据,恢复保存的数据。
1201-003
界面展开
3OM-1602
2-58
第二章 2. 补正 ( 补正值 ) 数据
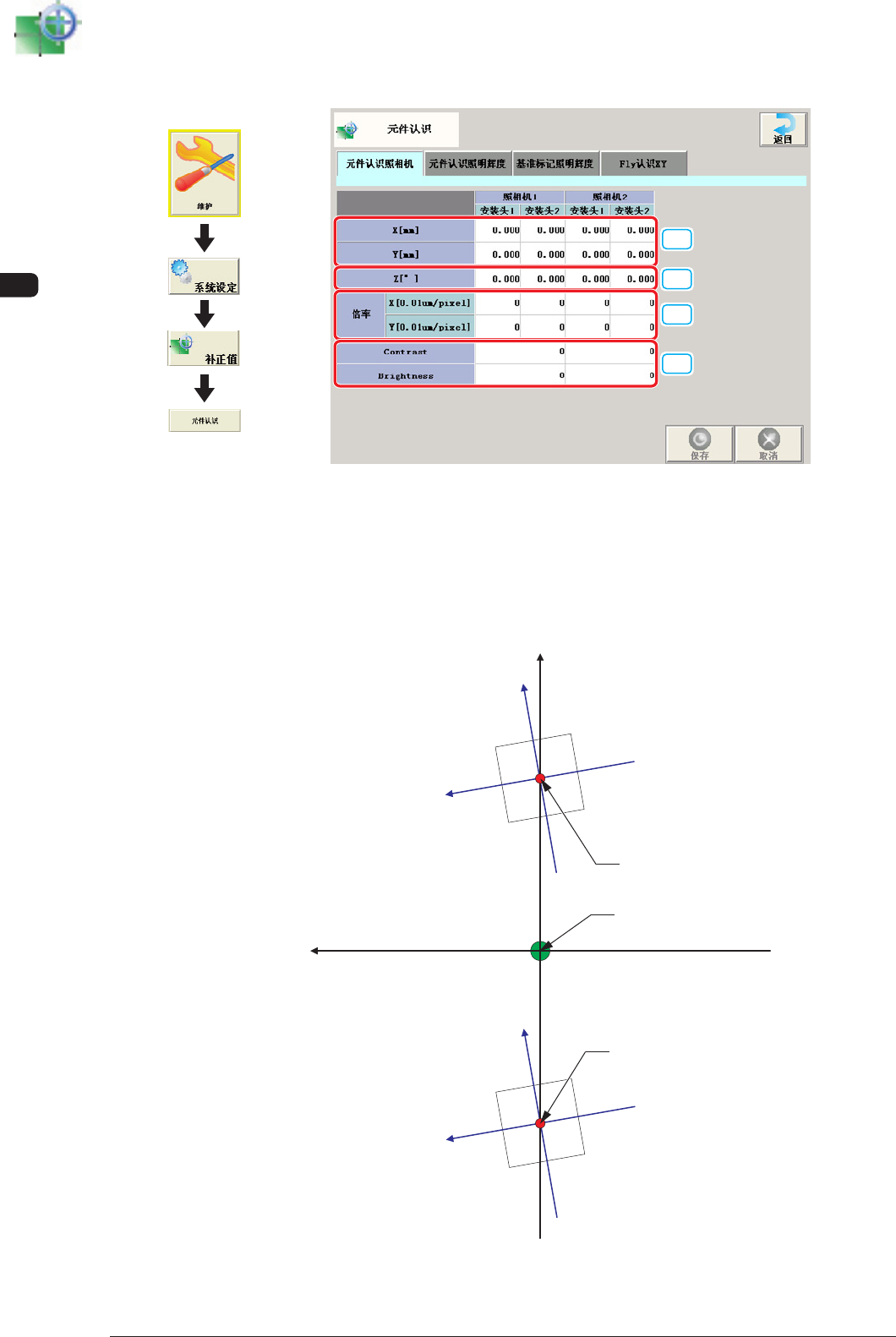
2.9.1 元件认识 ( 识别 ) 照相机
F3B51
[1] X( 横 )、Y( 纵 )[mm]
调整对装置基准坐标系原点到元件识别照相机中心的设计尺寸的位置
偏离。
Xm(+)
Ym (+)
Xm-Ym : 装置基准坐标系
Xc-Yc : 元件识别照相机坐标系
Xc(+)
Yc(+)
Xc(+)
Yc(+)
元件识别照相机中心
元件识别照相机中心
Pm.装置基准坐标原点
F3B52
1008-002
界面展开
3OM-1602
第二章 2. 补正 ( 补正值 ) 数据
2-59
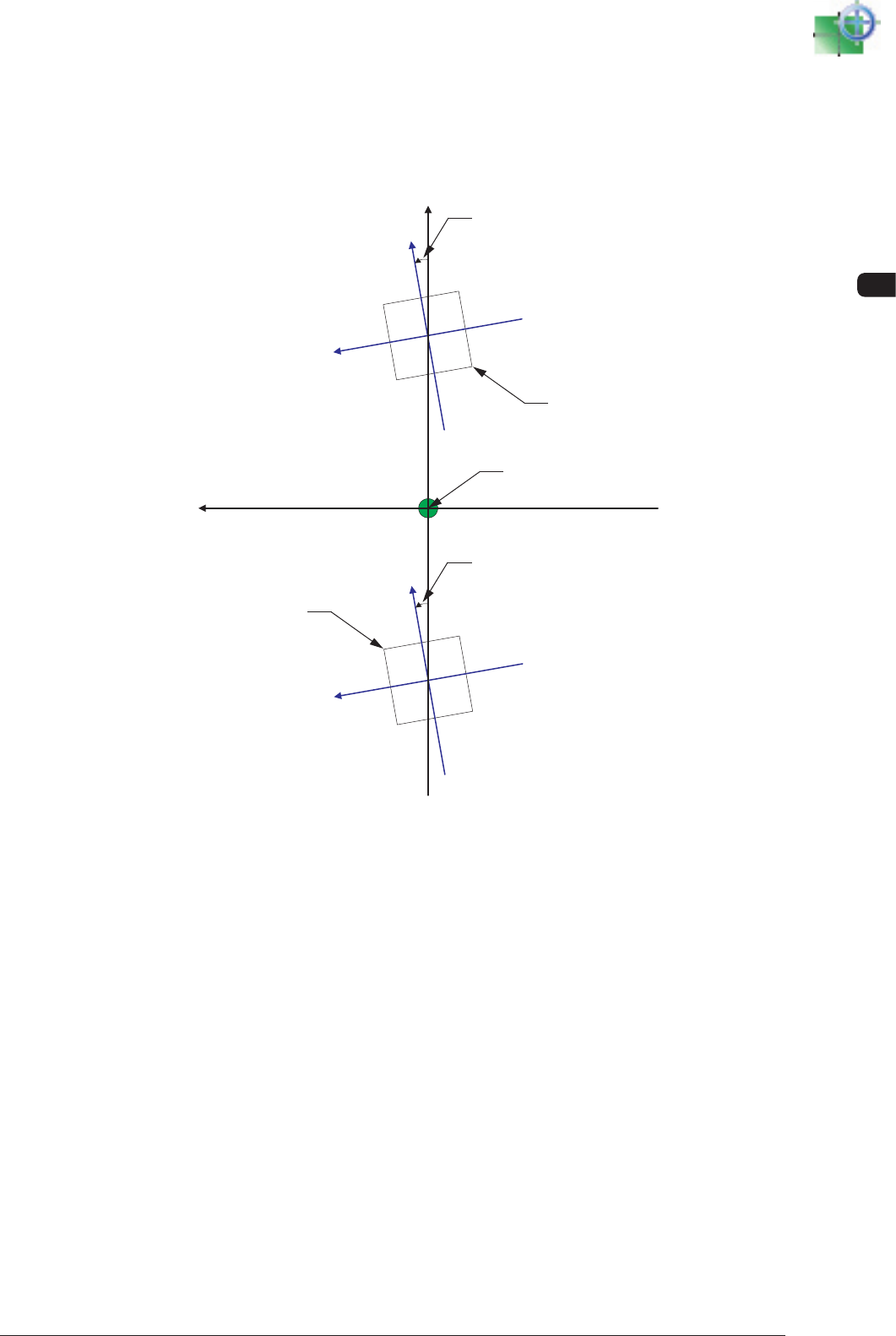
[2] Z( 角度 )[
°
]
设定对装置基准 XY 坐标 (Xm-Ym 坐标 ) 的元件识别照相机扫描坐标的
角度偏离。以装置基准 XY 坐标系为基准,元件识别照相机扫描坐标往
逆时针方向倾斜时,补正值数据的符号为
“
+
”
。
Xm(+)
Ym(+)
Xm-Ym : 装置基准坐标系
Xc-Yc : 元件识别照相机坐标系
Xc(+)
Yc(+)
Xc(+)
Yc(+)
元件识别照相机角度
元件识别照相机角度
元件识别照相机
元件识别照相机
Pm.装置基准坐标原点
F3B53
[3] 倍率 X( 横 )、Y( 纵 )[0.01
µ
m/pixel]
是设定元件识别照相机倍率的数据,用来设定 1 像素相当于多少微米。
该补正值在倍率测定用治具的教示操作下自动被算出。
•
初始值 :6060
1201-003