4H4CEOM1.pdf - 第51页
Page 1-7 GENERAL DESCRIPTION 1 Names and Mechanism of Each Unit Board Holder Fixes a board by sandwiching it between Y and Z directions, and hold it at the mount height, during mounting. X-Y Unit Moves the head unit to t…
Page 1-6
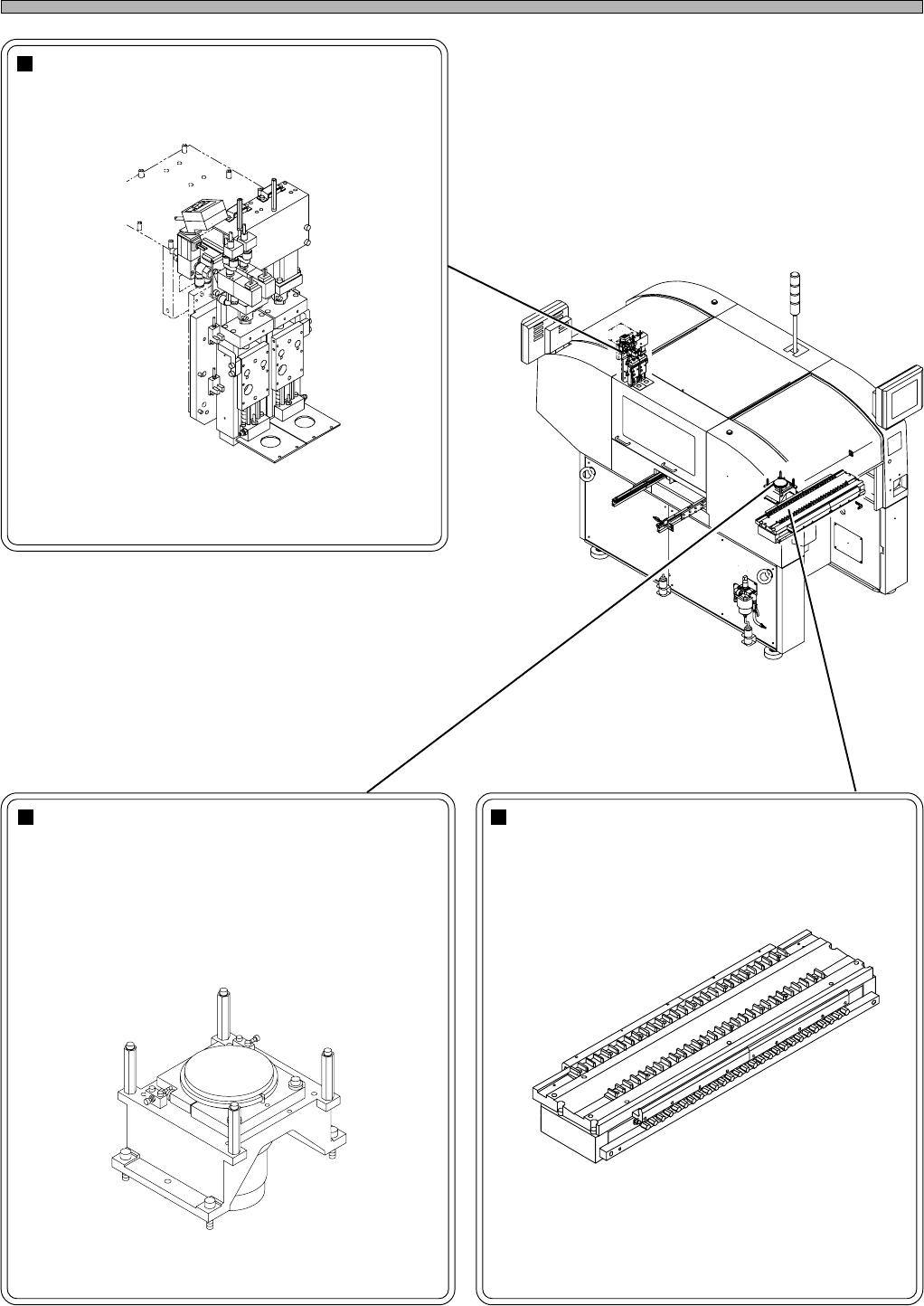
Z Unit
Moves the head unit upward and downward.
Names and Mechanism of Each Unit
Line Camera (Two in All)
Used to recognize chips.
This can recognize all the chips from minute ones
to large-sized and unusual-shaped ones.
010VC0AA01
4H4C-AJ00
160KC0AA00
4H4C-016E
4H4C-E-OMA01-A01-01
Tape Feeder Table
This is composed of the table, where the tape
feeders are set, and the tape feeding part, which
drives feeders.
∗ The tape feeding part operates even if the
vibratory stick feeder is used; however this is not
out of order.
Page 1-7
GENERAL DESCRIPTION
1
Names and Mechanism of Each Unit
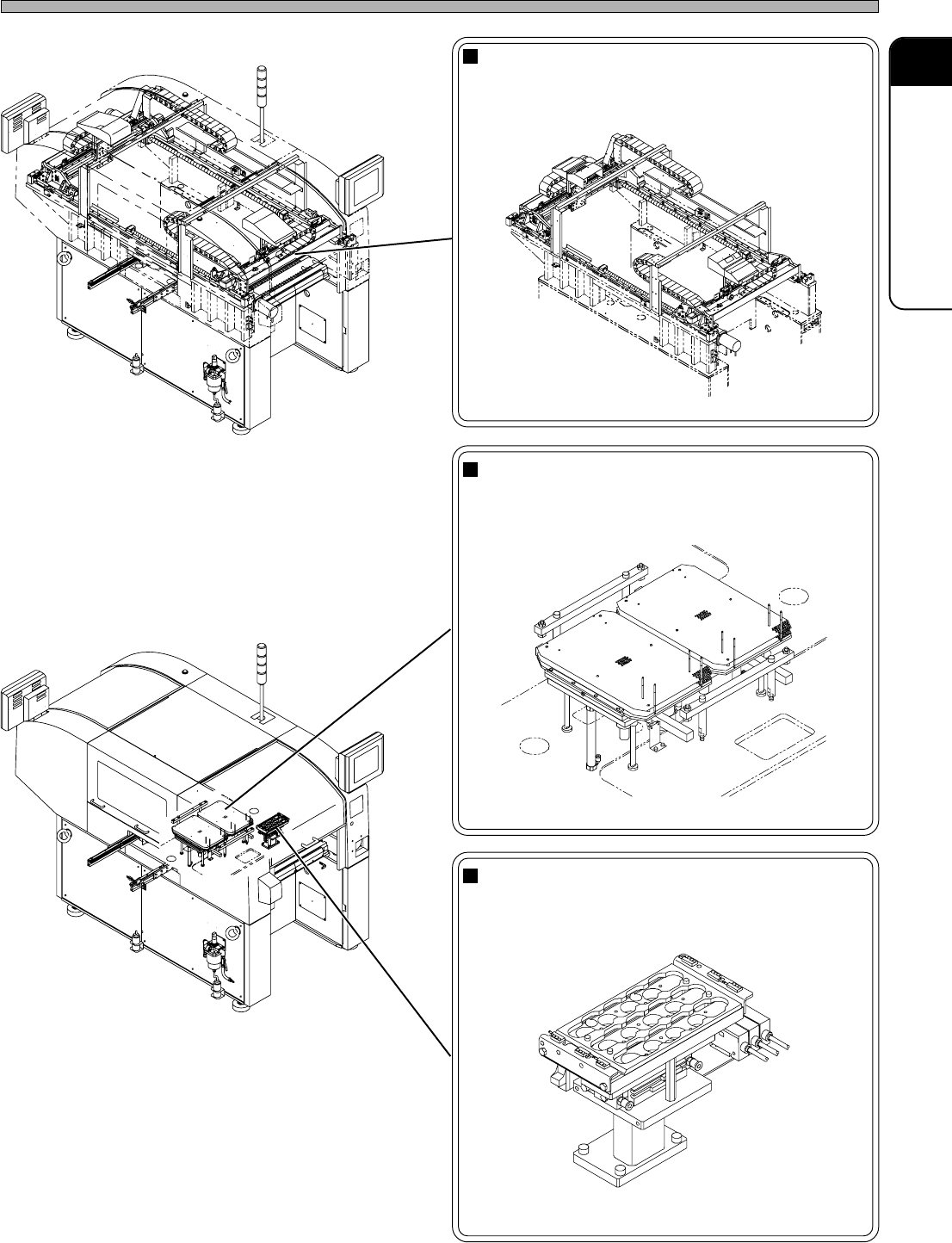
Board Holder
Fixes a board by sandwiching it between Y and Z
directions, and hold it at the mount height, during
mounting.
X-Y Unit
Moves the head unit to the appointed position
quickly and precisely.
4H4C-AK00
010UC0AA01
4H4C-E-OMA01-A01-00
Nozzle Changer (Two in All)
Changes nozzles automatically during production.
15VHC0AA01
0503C0AA01
4H4C-AL00
Page 1-8
Names and Mechanism of Each Unit
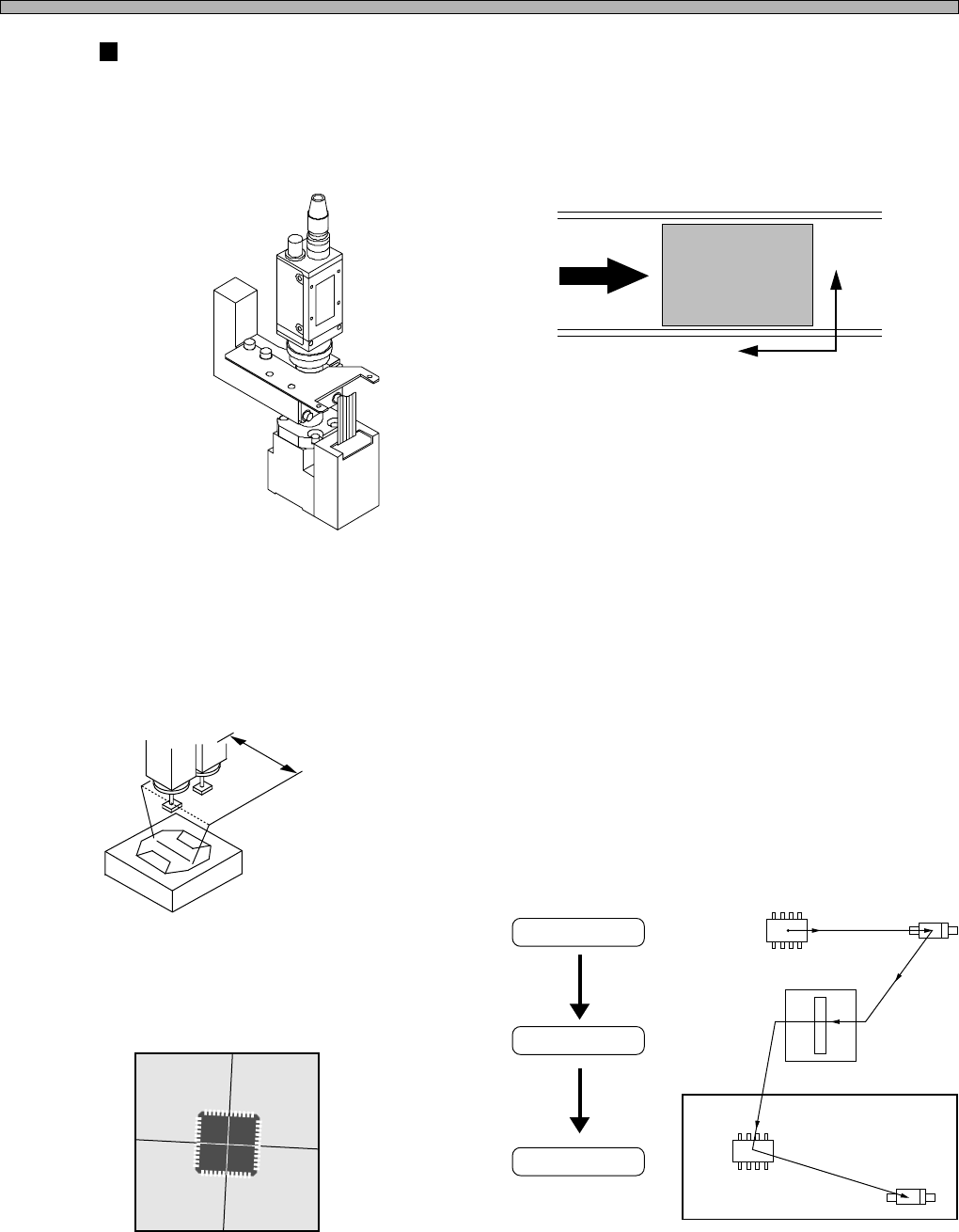
Recognition Camera
This machine has two types of recognition camera: head camera and line camera.
a) Head Camera
The head camera is set on the head unit, and recognizes the precise position of a board.
b) Line Camera
The line camera is set on the frame of main body, and recognizes chips (positioning deviation,
inclination, chipping, etc.).
Line camera
Board
[Process]
Two chips are scanned and recognized in a row by
moving the head so that it will move across the line.
Start
Batch
recognition
4H4C-004E
Line width : 50 mm
4H4C-002E
Recognition image
Reference position
Board
Y
X
4H4C-003E
016JC0AA
4H4C-E-OMA01-A01-00
Recognition
Mounting
Chip pick-up