KE-2050_2060_使用说明书.pdf - 第482页
第1部 基本篇 第4章 生产程序制作 4-204 3) 正在执行吸取位置摄象机跟踪/吸取高度跟踪 进行后,在各吸取位置(高度)的跟踪中显示如下的画面。 图 4.5.4.4.4-4 正在执行吸取位置摄象机跟踪(吸取高度跟踪) ① 状态 (1) 跟踪模式 显示用传送方法设定的 “手动”或“自动”。 (2) 跟踪顺序 显示用跟踪顺序设定的 “送料器顺序”或“元件顺序”。 (3) 跟踪范围 显示对从几号到几号的元件进行跟踪 ,或对哪个送料器台架…
第1部 基本篇 第4章 生产程序制作
4-203
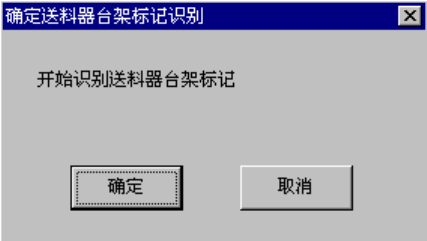
2) 执行台架标记的校准
在向各送料器台架跟踪移动前,如果用设置设定了台架标记识别,为了提高吸取位置的精度,
将执行台架标记识别。此时将显示如下信息,请按下“确定”。按下“取消”时,不进行精
度修正。
图 4.5.4.4.4-3 送料器台架识别确认
第1部 基本篇 第4章 生产程序制作
4-204
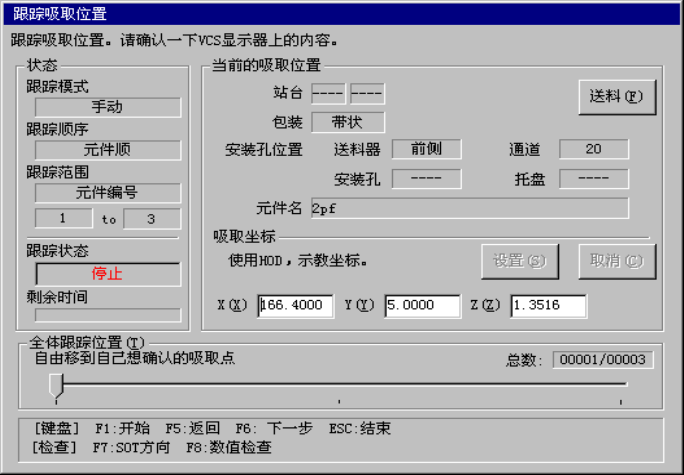
3) 正在执行吸取位置摄象机跟踪/吸取高度跟踪
进行后,在各吸取位置(高度)的跟踪中显示如下的画面。
图 4.5.4.4.4-4 正在执行吸取位置摄象机跟踪(吸取高度跟踪)
① 状态
(1) 跟踪模式
显示用传送方法设定的“手动”或“自动”。
(2) 跟踪顺序
显示用跟踪顺序设定的“送料器顺序”或“元件顺序”。
(3) 跟踪范围
显示对从几号到几号的元件进行跟踪,或对哪个送料器台架进行跟踪。
(4) 跟踪状态
“动作中”表示轴正在移动中。“暂停”表示处于自动传送的临时停止中。
“停止”表示手动传送或有意识的停止。“轴待避中”表示正在将轴移动到安全位置。
(5) 停止剩余时间
显示自动传送的临时停止剩余时间。
② 当前的吸取位置
显示当前的吸取信息。
按下“送料器”按钮,对送料器的进行顶推。(传送元件)
③ 吸取坐标
是跟踪中的吸取坐标。坐标值可用手动输入或通过示教来变更。
④ 设定/取消
通过手动输入或示教而变更坐标值后生效。当按下“设定”时,储存贴片坐标。当不想保
存变更值时,请按下“取消”。
⑤ 整体的跟踪位置
根据跟踪位置的进展情况逐一进行。在停止时,可通过自由移动该滑块返回上一点或进入
下一点。
第1部 基本篇 第4章 生产程序制作
4-205
4) 跟踪中的操作
进行中可以通过使用以下的键/开关控制动作。
操 作 键 盘 操作面板 HOD
跟踪开始 F1 开始按钮 ENTER
跟踪停止 F2 停止按钮 PAUSE
移动到前一点 F5 PREVIOUS
移动到下一点 F6 NEXT
结束 在停止时按 ESC 在停止时按停止按钮 在停止时按 PAUSE