KE-2050_2060_使用说明书.pdf - 第612页
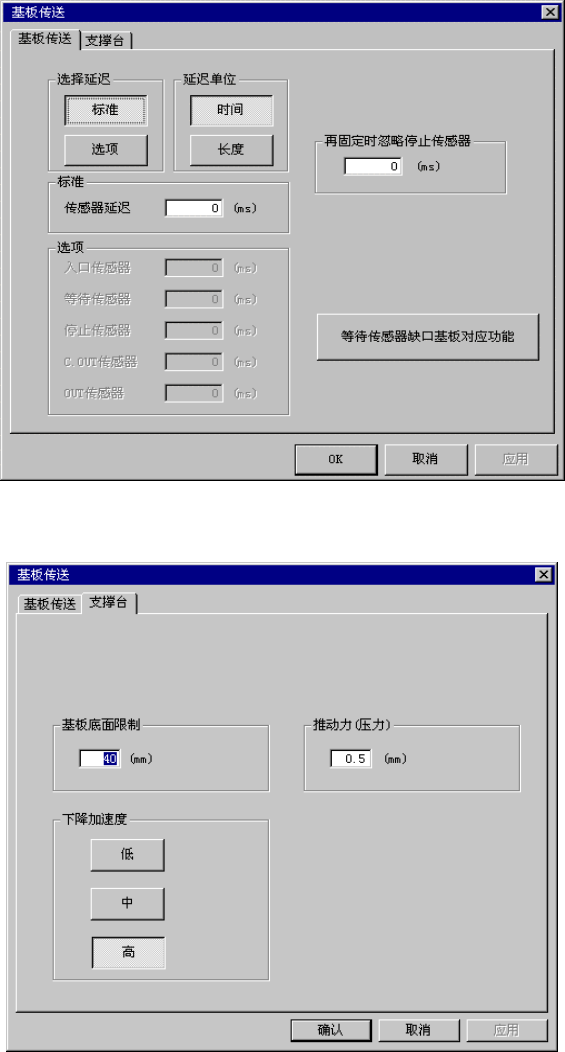
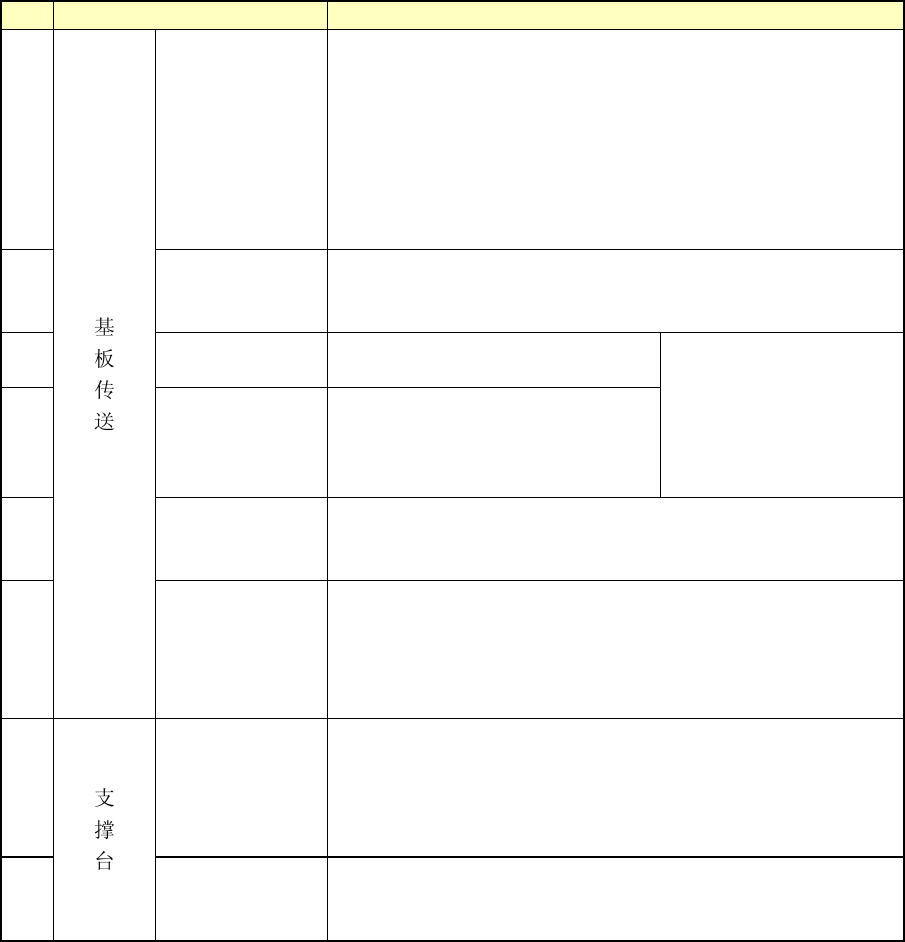
第2部 基本编 第8章 机器设定 8-4-10-7 基板传送 设置基板传送时的条件。 选择 基 板 传 送, 则 显 示图 8-4-10-7 的基板传送设置画面。 选择支撑台标签,则显示图 8-4-10-8。 图 8-4-10-7 基板传送设置画面 图 8-4-10-8 支撑台面设置画面 8-27
第2部 基本编 第8章 机器设定
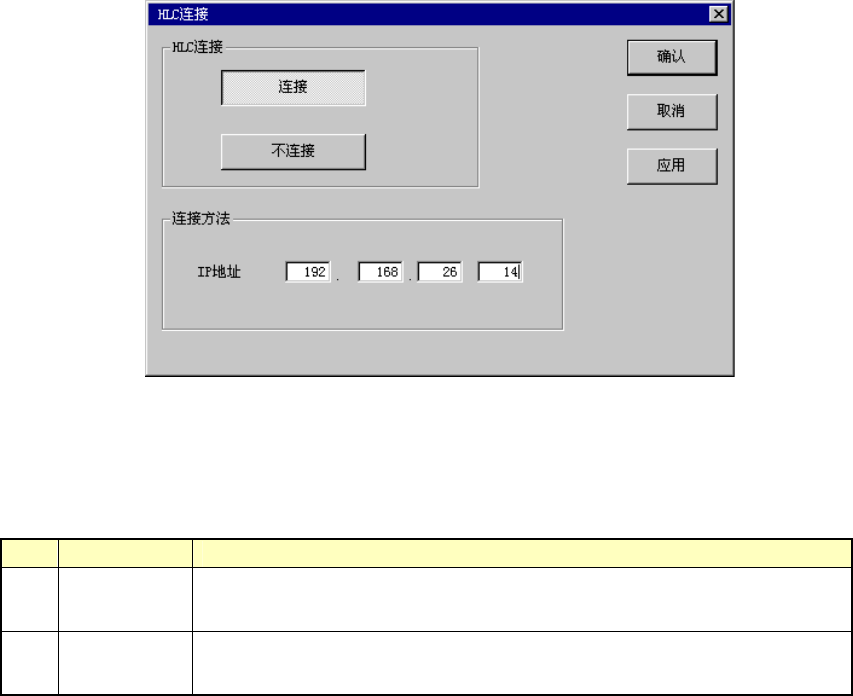
8-4-10-6 HLC 连接
使用HLC时,设置和HLC通讯的IP地址。
若选择HLC连接,则显示如下图所示的HLC连接设置画面。
图 8-4-10-6 HLC 连接的设置画面
1) 设置方法与内容
表 8-4-10-5 设置方法与内容
No. 项目 设置内容
1 HLC 连接
若要将本装置与 HLC(可选项)连接,设置为“连接”。
选择后,则按钮成为凹状态。(默认值为不连接)
2 IP 地址
若已设置与 HLC“连接”,则将设置与 HLC 通信的 IP 地址。
IP 地址的号码请根据网络管理员的指示进行设置。
· IP地址的各组数值可在“0~255的值范围内进行设置”。站台之间不可设置同一个值。此
外,也不可以将所有区域都设置为0。
8-26
第2部 基本编 第8章 机器设定
8-4-10-7 基板传送
设置基板传送时的条件。
选择基板传送,则显示图8-4-10-7的基板传送设置画面。选择支撑台标签,则显示图
8-4-10-8。
图 8-4-10-7 基板传送设置画面
图 8-4-10-8 支撑台面设置画面
8-27
第2部 基本编 第8章 机器设定
1) 设置方法与内容
表 8-4-10-6 设置方法与内容
No. 项目 设置内容
1
延迟时间的选择
选择是统一还是个别设置传送的各传感器的延迟时间。若选
择则按钮成为凹状态。
·标准:各传感器采用相同的延迟时间
·可选:各传感器可设置为不同的延迟时间
若选择“标准”,则以下的“标准”传感器延迟时间为有效,若
选择“可选”,则“可选”的各传感器设置的延迟时间有效。
2
延迟的单位
从时间(ms:1/1000 秒)和长度(mm)中选择基板传送传感器延迟
的设定值的单位。
选择后,按钮成为凹状态。
3
传感器延迟时间
当用“延迟时间选择”选择了“标
准”时,设置延迟时间或长度。
4
可选
用“延迟时间选择”选择了“可选”
时,分别设置 IN 传感器、WAIT 传感
器、STOP 传感器、C.OUT 传感器、OUT
传感器的延迟时间或长度。
可设置的值为
0~2500(ms)、
0~1000(mm)。
5 重新夹紧时的
STOP 传感器 OFF
因送料器悬浮等导致生产异常停止后重新生产时,不除去基
板而重新夹紧(翻转后夹紧)时的延迟时间。
可设置的值为 0~5000(ms)、0~200(mm)。
6
WAIT 传感器的对
应基板缺口功能
当基板缺口部分停止在 WAIT 传感器上时,不论基板是否存在,
WAIT 传感器上的检验状态即被清除,判断为无基板。
若把[WAIT 传感器的基板缺口对应功能]设定为有效,则 WAIT
传感器在[OFF]状态下也可储存[ON]时的状态,确保基板的正
常传送。
7
下降加速度
从“高”、“中”、“低”的3种速度中选择支撑台下降时的加
速度。(默认值为“高”)
若因焊锡的粘度低等原因而导致元件易动,请设置为“中”
或“低”。
8
压入量
输入支撑台上升时的偏移值(0~5mm)。
按已设置的值,支撑销向上顶压基板。
(默认值:0.5mm)
8-28