KE-2050_2060_使用说明书.pdf - 第618页
第2部 基本编 第8章 机器设定 8-4-10-11 共面检测 若安装有共面性单元(可选),指定“共面性的重试次数”和“基准平面制作方法”。 若选择共面性,则显示下图的共面性设置画面。 图 8-4-10-12 共面性设置画面 1) 设置项目 No. 项目 设置内容 1 重试次数 设置共面性错误时的重试次数。 2 基准平面 为了判断引脚(或球)悬浮,必须决定作为判断基准的平面(基准平面)。 基准平面是通过识别所有引脚并由此制作假想平面的方…
第2部 基本编 第8章 机器设定
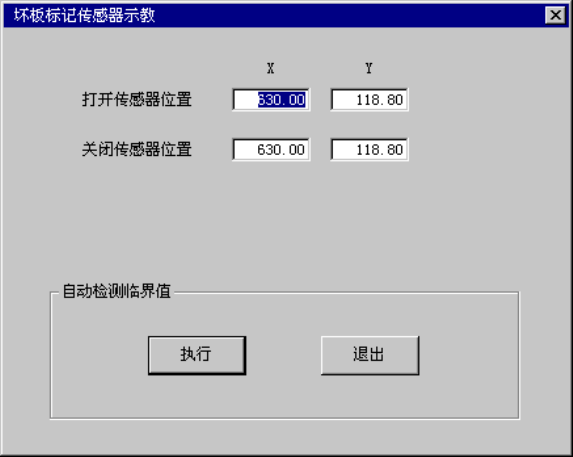
8-4-10-10 坏板标记传感器示教
当坏板标记的颜色和基板的颜色难以区别时,设置传感器的灵敏度。
选择坏板标记传感器示教,则显示如下图所示的坏板标记传感器示教设置画面。
图 8-4-10-11 坏板标记传感器示教设置画面
<设置方法>
1. 安装已作有坏板标记的基板。
2. 在传感器 ON 与、OFF 位置上示教坏板标记的中心位置与基板的位置(无模式处)。此时,将
明亮的基板设为“传感器 ON 位置”,暗的基板设为“传感器 OFF 位置”。(当为陶瓷基板时,
将基板设为“传感器 ON 位置”。)
3. 单击“执行”,则“自动获得”。
8-32
第2部 基本编 第8章 机器设定
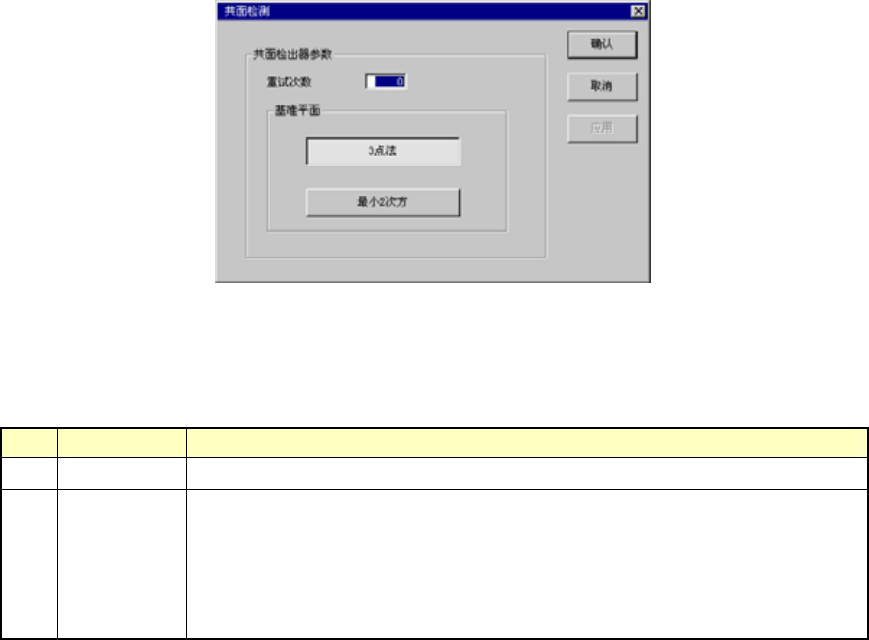
8-4-10-11 共面检测
若安装有共面性单元(可选),指定“共面性的重试次数”和“基准平面制作方法”。
若选择共面性,则显示下图的共面性设置画面。
图 8-4-10-12 共面性设置画面
1) 设置项目
No. 项目 设置内容
1 重试次数 设置共面性错误时的重试次数。
2 基准平面
为了判断引脚(或球)悬浮,必须决定作为判断基准的平面(基准平面)。
基准平面是通过识别所有引脚并由此制作假想平面的方式决定。基准平面
的制作方法,从“3 点法”和“最小平方法”中选择。
KE2000 系列根据 JIS 标准的规定,引脚元件采用“3 点法”,球元件采
用“最小平方法”。
2) 设置方法
① 重试次数
请直接从键盘输入次数。输入范围为0~10。
② 基准平面
通过按钮选择3点法还是最小平方法。
选择后,按钮变为凹状态。
8-33

第2部 基本编 第8章 机器设定
8-4-10-12 激光面接触检查
选择了激光面接触检查之后,下图所示的激光面接触检查设定对话框显示出来。
图 8-4-10-13 激光面接触检查对话框
●设定激光面接触检查
这是为了防止接触元件的激光 (MNLA) 玻璃表面,在通过吸附后的激光定位转动测定元件前的阶段,
检查是否接触到激光面的功能。
可以设定激光面接触检查时的容限值。
项目 详细内容 输入范围
检查容限值 在进行激光面接触检查时,设定元件和玻璃表面的距离的容
限值 (默认值 = 1.00 mm)。
0.10 ~ 5.00 mm
8-34