KE-2070_2080 動作説明書.pdf - 第105页
R e v 1 . 00c 动作说明书 5- 13 3、 DIPSW2(8bit) 1 2 3 4 5 6 7 8 ON B i t4∼1;基板組機能R EV .設定 B i t8∼5;基板パ ターン R EV . 設定 *O N 側;1、O F F 側;0 *基板R E V . 管理表に 従い 設定す る 。 ON 侧: 1 ; OFF 侧: 0 根据电路板 REV. 管理表设定。 设定电路板组功能 REV. 设定电路板图案 REV…
Rev1.00c
动作说明书
5-
12
④DIP SW的说明
各DIP SW的意义如下。
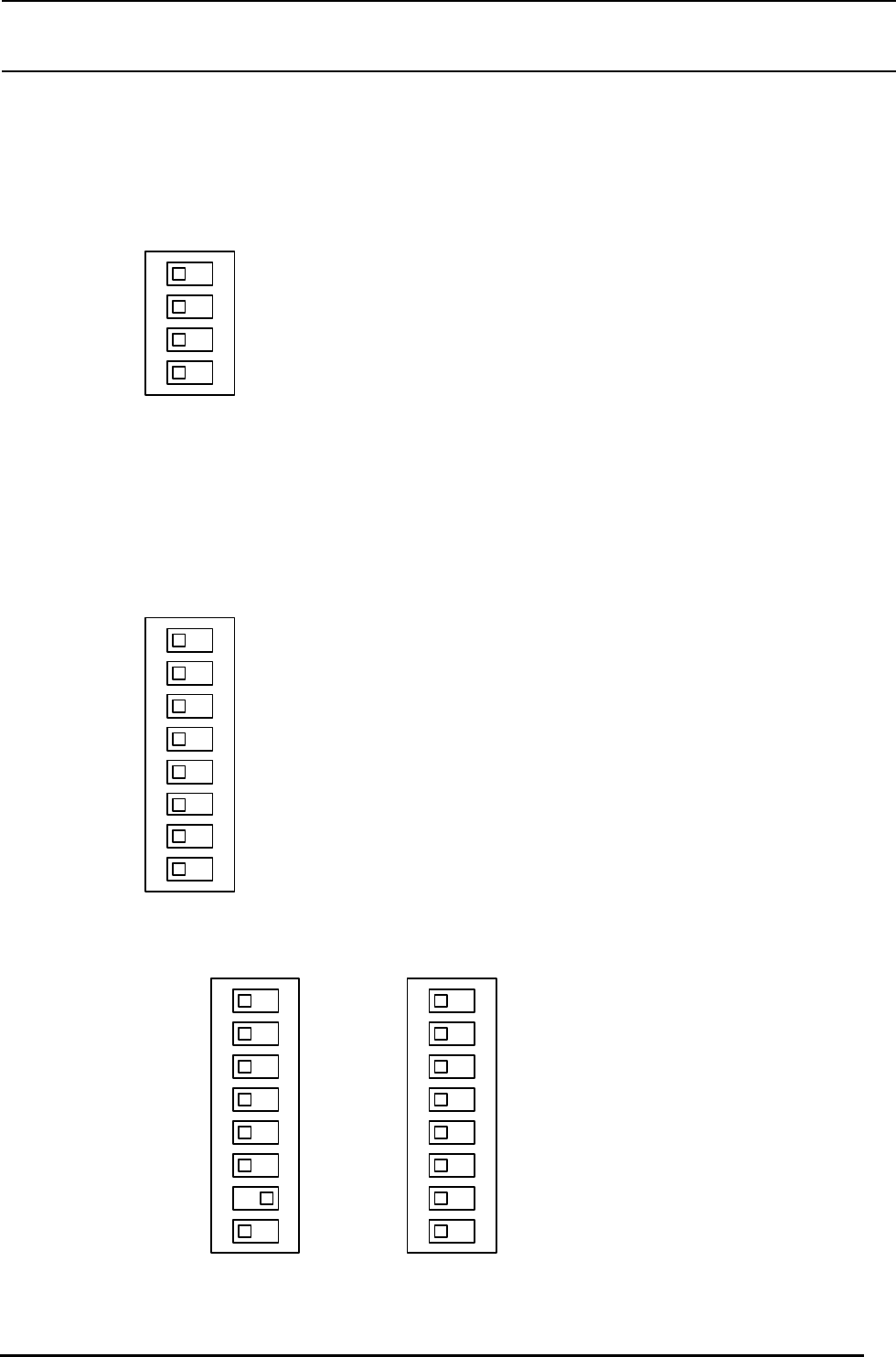
1、 DIPSW4(4bit)
1
2
3
4
ON
Bit 3 2 1
L L L ;A/D変換データ手動設定時Z1バキュームレベル選択
L L H ;A/D変換データ手動設定時Z2バキュームレベル選択
L H L ;A/D変換データ手動設定時Z3バキュームレベル選択
L H H ;A/D変換データ手動設定時Z4バキュームレベル選択
H L L ;A/D変換データ手動設定時Z5バキュームレベル選択
H L H ;A/D変換データ手動設定時Z6バキュームレベル選択
H H L ;A/D変換データ手動設定時Z7バキュームレベル選択
H H H ;A/D変換データ手動設定時Z7ポイントセンサレベル選択
Bit 4
L ;A/D変換データ手動設定
H ;A/D変換データ自動設定
*ON側;L、OFF側;H
*通常設定は、全てOFF側
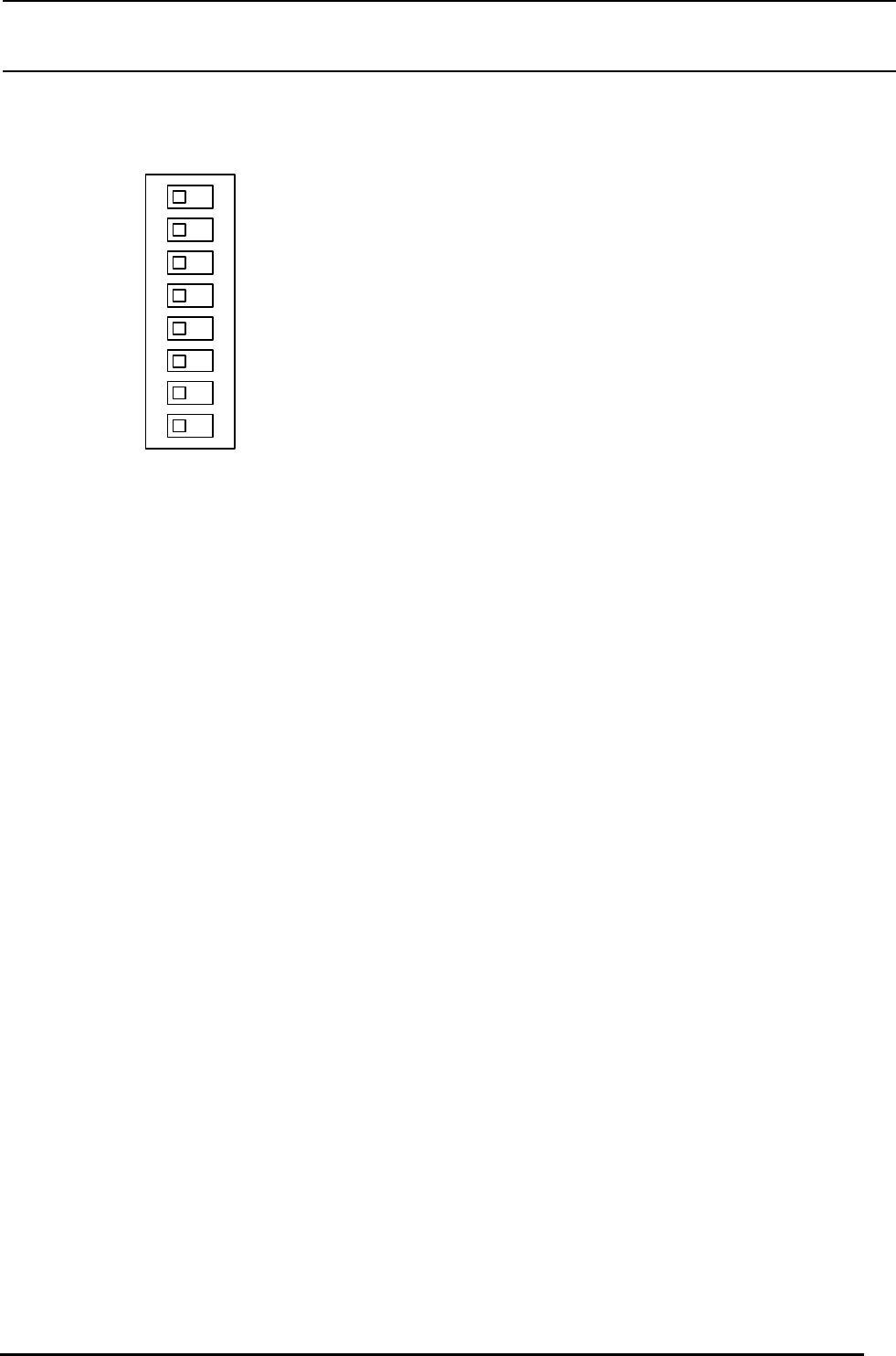
2、 DIPSW1(8bit)
1
2
3
4
5
6
7
8
ON
Bit7∼1;各Z軸の減速センサ有効/無効設定
Bit 1 ;L1、L;無効、H;有効
2 ;L2、L;無効、H;有効
3 ;L3、L;無効、H;有効
4 ;L4、L;無効、H;有効
5 ;L5、L;無効、H;有効
6 ;L6、L;無効、H;有効
7 ;R1、L;無効、H;有効
Bit 8
L ;全軸バキューム/ブロー繰り返し動作
H ;通常動作
*ON側;L、OFF側;H
*通常設定は、以下の通り
KE−2070 KE−2080
1
2
3
4
5
6
7
8
ON
1
2
3
4
5
6
7
8
ON
A
/D 变换数据手动设定时选择 Z1 真空电平
A
/D 变换数据手动设定时选择 Z2 真空电平
A
/D 变换数据手动设定时选择 Z3 真空电平
A
/D 变换数据手动设定时选择 Z4 真空电平
A
/D 变换数据手动设定时选择 Z5 真空电平
A
/D 变换数据手动设定时选择 Z6 真空电平
A
/D 变换数据手动设定时选择 Z7 真空电平
A
/D 变换数据手动设定时选择 Z7 点传感器电平
A
/D 变换数据手动设定
A
/D 变换数据自动设定
ON 侧:L;OFF 侧:H
通常的设定均为 OFF 侧
设定各 Z 轴的减速传感器有效/无效
L1、L:无效;H:有效
L2、L:无效;H:有效
L3、L:无效;H:有效
L4、L:无效;H:有效
L5、L:无效;H:有效
L6、L:无效;H:有效
R1、L:无效;H:有效
全部轴真空/鼓风反复动作
通常动作
ON 侧:L;OFF 侧:H
通常设定如下
Rev1.00c
动作说明书
5-
13
3、 DIPSW2(8bit)
1
2
3
4
5
6
7
8
ON
Bit4∼1;基板組機能REV.設定
Bit8∼5;基板パターンREV.設定
*ON側;1、OFF側;0
*基板REV.管理表に従い設定す る。
ON 侧:1;OFF 侧:0
根据电路板 REV.管理表设定。
设定电路板组功能 REV.
设定电路板图案 REV.
Rev1.00c
动作说明书
5-
14
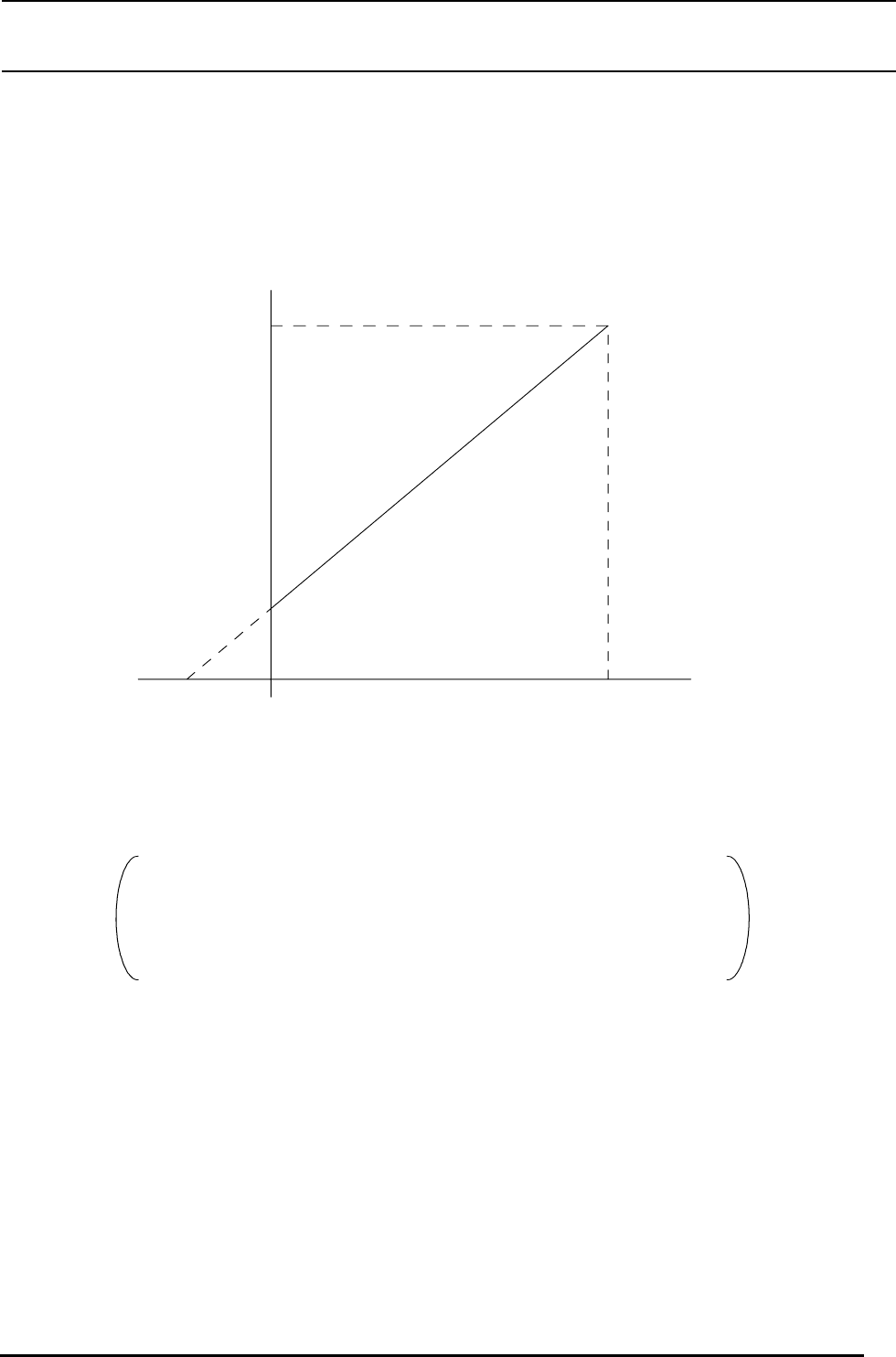
⑤真空值的换算
A/D变换的值换算成真空值的方法如下。
5V
1V
0
190
−760レベル
* A/Dの読込み値Dpに対する、バキューム値Pの算出方法
P=−((Dp−51)×760/204 )[レベル]
0∼5V −−−→ 0∼255(FFh)
1∼5V −−−→ 52∼255=204
0∼−760レベル −−−→ 52∼255
最小分解能=760/204≒3.725[レベル]
等 级
等 级
等 级
最小分辨率
等 级
对
A/ D
读 取 值
Dp
计 算真空值
P
的 计 算方法