KE-2070_2080 動作説明書.pdf - 第23页
R e v 1 . 00c 动作说明书 3- 10 3 ) 传送速度:高速;支撑台上升速度:低速 INセンサ WAITセ ンサ STOPセンサ INモータ センターモータ バック UPプレートモ ータ 100ms センターストッパー 外形基準(Xプ ッシャ) 外形基準(Yプッシャ) 100ms 100ms 動作時間 1080ms 1650ms 480ms 予備送り ( 距離 4 3.7mm ) XY軸 生産開始位置へ移動 動作…
Rev1.00c
动作说明书
3-
9
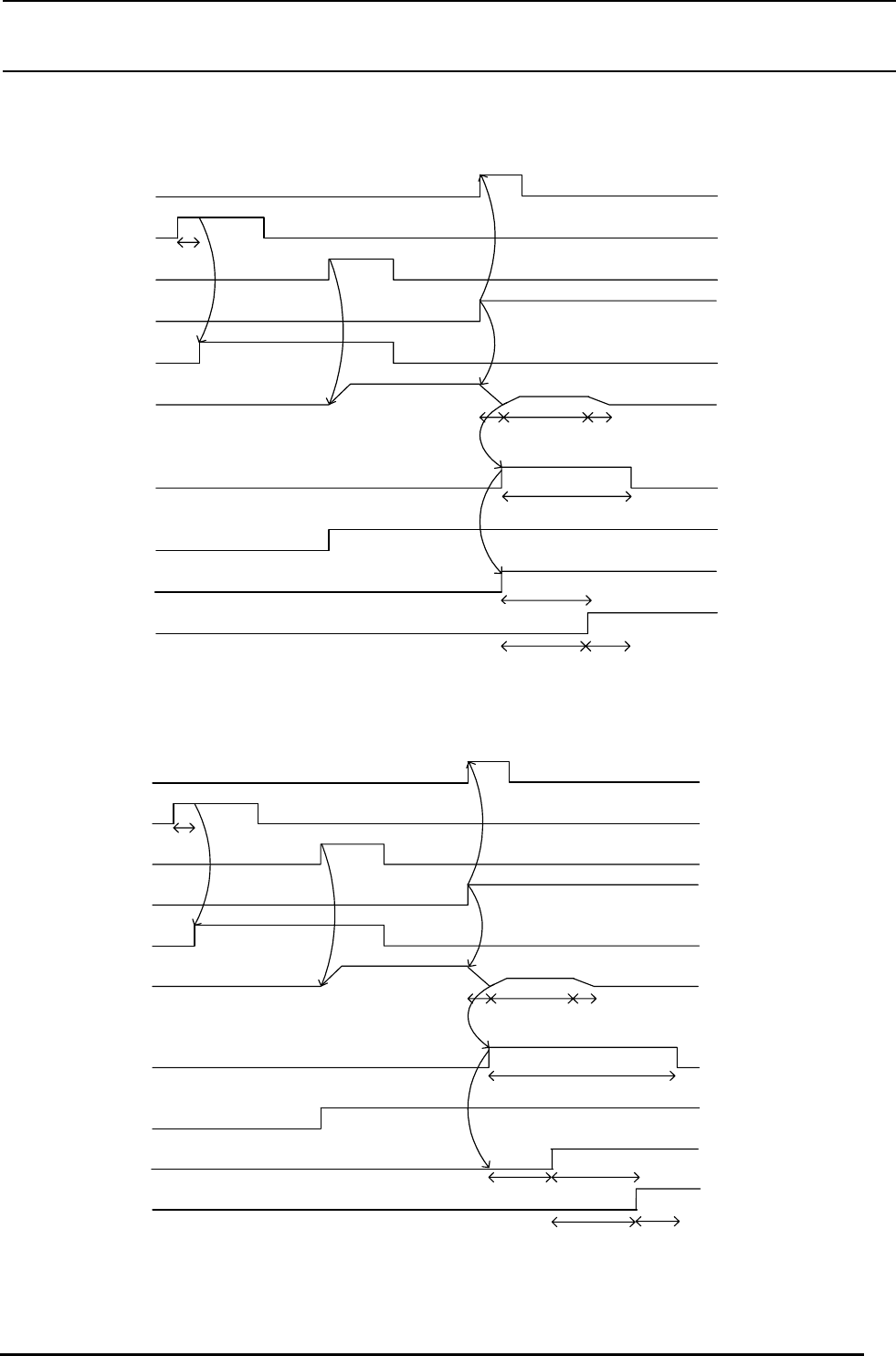
3-2-3 基板传送同步时间图
1) 传送速度:高速;支撑台上升速度:高速
INセンサ
WAITセンサ
STOPセンサ
INモータ
センターモータ
バックUPプレートモータ
100ms
センターストッパー
外形基準(Xプッシャ)
外形基準(Yプッシャ)
100ms
100ms
動作時間 600ms
400ms
400ms
予備送り ( 距離 43.85mm)
XY軸
生産開始位置へ移動
動作時間 430ms
(20mm) (1.5mm + 19.3 mm)
動作時間 200ms
(2.8mm)
56mm/s400mm/s
2) 传送速度:高速;支撑台上升速度:中速
INセンサ
WAITセンサ
STOPセンサ
INモータ
センターモータ
バックUPプレートモータ
100ms
センターストッパー
外形基準(Xプッシャ)
外形基準(Yプッシャ)
100ms
100ms
動作時間 960ms
400ms
400ms
予備送り ( 距離 43.85mm)
XY軸
生産開始位置へ移動
動作時間 430ms
(20mm) (1.5mm + 19.3 mm)
動作時間 200ms
(2.8mm)
56mm/s
360ms
400mm/s
XY 轴
IN 传感器
WAIT 传感器
STOP 传感器
IN 电动机
中央电动机
基板背型夹具板电动机
中央止动器
外形基准(X 推杆)
外形基准(Y 推杆)
向生产开始位置移动
预备进给(距离 43.85mm)
动作时间 600ms
动作时间
430ms
动作时间 200ms
XY 轴
IN 传感器
WAIT 传感器
STOP 传感器
IN 电动机
中央电动机
基板背型夹具板电动机
中央止动器
外形基准(X 推杆)
外形基准(Y 推杆)
向生产开始位置移动
预备进给(距离 43.85mm)
动作时间 960ms
动作时间
430ms
动作时间 200ms
Rev1.00c
动作说明书
3-
10
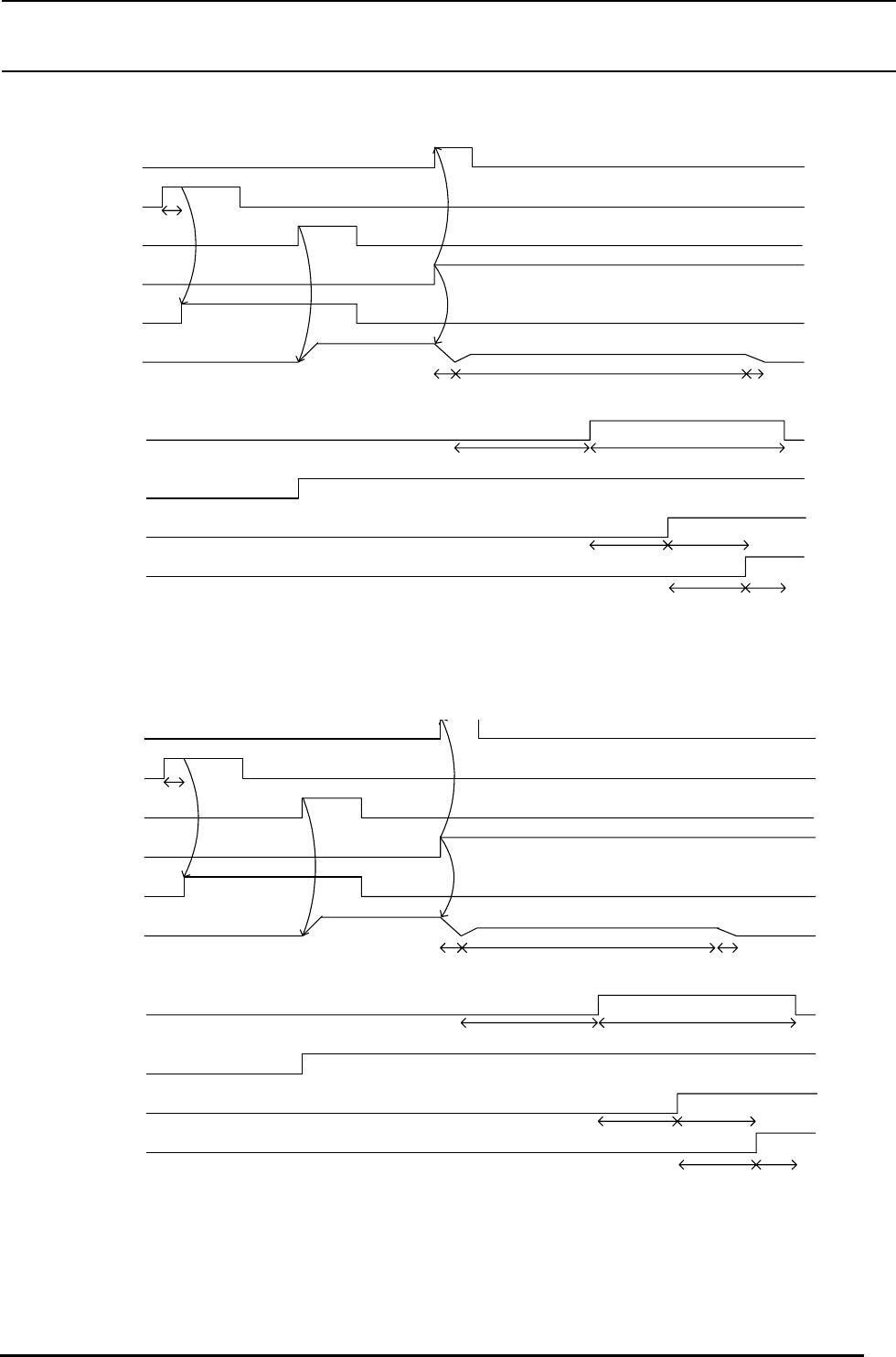
3) 传送速度:高速;支撑台上升速度:低速
INセンサ
WAITセンサ
STOPセンサ
INモータ
センターモータ
バックUPプレートモータ
100ms
センターストッパー
外形基準(Xプッシャ)
外形基準(Yプッシャ)
100ms
100ms
動作時間
1080ms
1650ms
480ms
予備送り ( 距離 43.7mm)
XY軸
生産開始位置へ移動
動作時間
430ms
(0.7mm)
(0.1mm + 22.9mm)
動作時間
200ms
770ms
400ms
(20mm)
14mm/s
400mm/s
4) 传送速度:高速;支撑台上升速度:超低速
INセンサ
WAITセンサ
STOPセンサ
INモータ
センターモータ
バックUPプレートモータ
100ms
センターストッパー
外形基準(Xプッシャ)
外形基準(Yプッシャ)
100ms 100ms
動作時間
2160ms
1650ms
1560ms
予備送り ( 距離 43.7mm)
XY軸
生産開始位置へ移動
動作時間
430ms
(0.7mm)(0.1mm + 22.9mm)
動作時間
200ms
770ms
400ms
(20mm)
14mm/s
400mm/s
XY 轴
IN 传感器
WAIT 传感器
STOP 传感器
IN 电动机
中央电动机
基板背型夹具板电动机
中央止动器
外形基准(X 推杆)
外形基准(Y 推杆)
向生产开始位置移动
预备进给(距离 43.7mm)
动作时间 1080ms
动作时间
430ms
动作时间 200ms
XY 轴
IN 传感器
WAIT 传感器
STOP 传感器
IN 电动机
中央电动机
基板背型夹具板电动机
中央止动器
外形基准(X 推杆)
外形基准(Y 推杆)
向生产开始位置移动
预备进给(距离 43.7mm)
动作时间 2160ms
动作时间
430ms
动作时间 200ms
Rev1.00c
动作说明书
3-
11
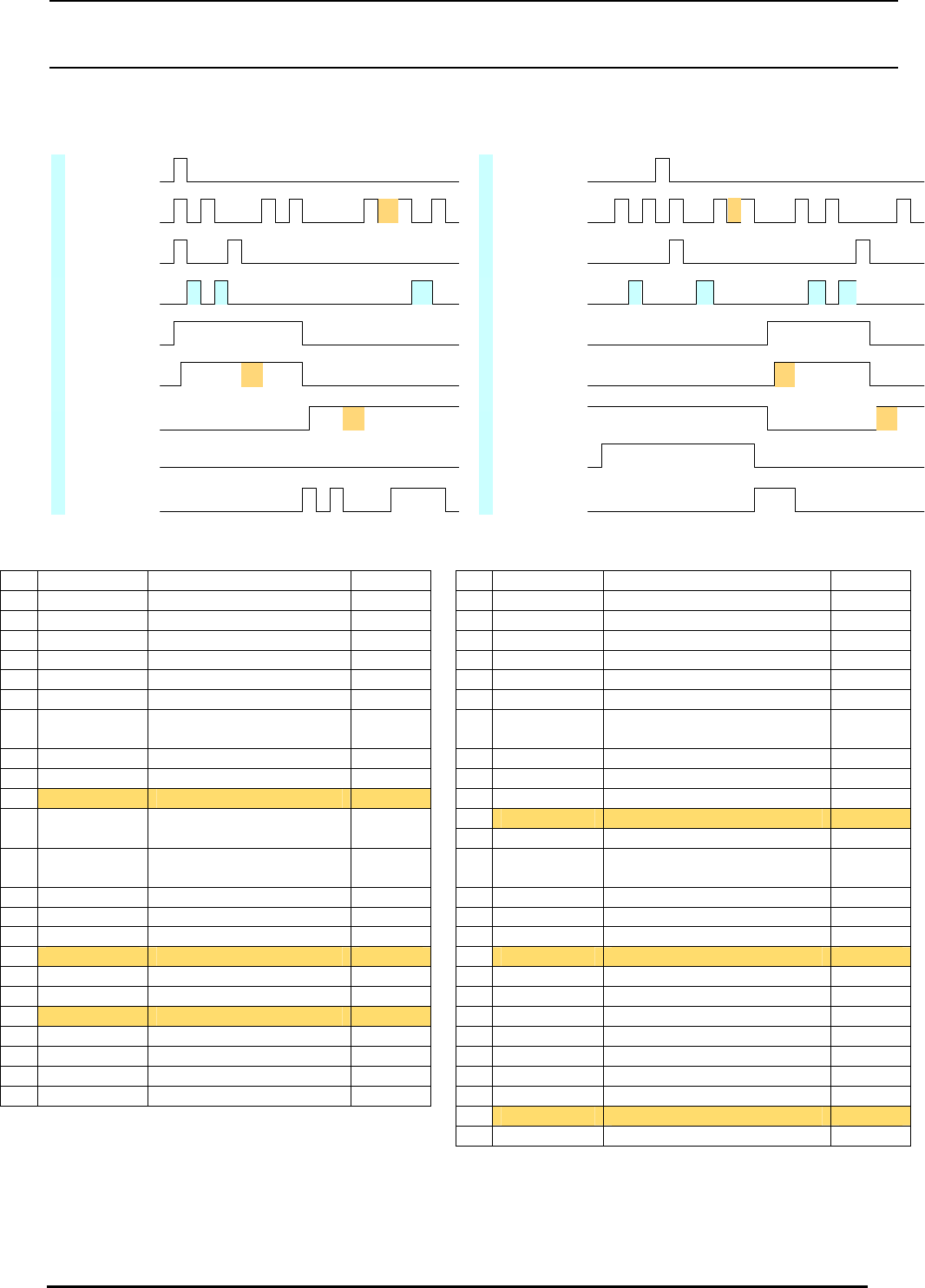
3-3 吸嘴更换动作
3-3-1 有θ修正时
移動
停止
移動
停止
回転
停止
計測
非計測
Open
Close
On
Off
On
Off
On
Off
On
Off
XY
Z
θ
レーザ
スライド
プレート
Open
センサ
Close
センサ
Vaccume
Blow
1
3
2
4
10
C
5
6
7
8
9
11 12
13
14 15
16
C
ノズル返却動作(θ補正有)
17
18
19
A
20
21
22
23
移動
停止
移動
停止
回転
停止
計測
非計測
Open
Close
On
Off
On
Off
On
Off
On
Off
XY
Z
θ
レーザ
スライド
プレート
Open
センサ
Close
センサ
Vaccume
Blow
3
8
13
ノズル装着動作(θ補正有)
1
2 4
56
7
9
10
11
12
B
14
15
16
17
E
18
19
20
21
22
23
24
25
D
26
吸嘴归还动作(有 θ 校正) 吸嘴安装动作(有 θ 校正)
项 目 动 作 备 注 项 目 动 作 备 注
1 X、Y 开始向归还吸嘴位置移动 1 真空 On
2 θ 预加载 2 Z 向检测有无吸嘴高度移动
3 Z 向确认有无吸嘴高度移动 3 激光 检测有无吸嘴 ONCE
4 滑板 开动作开始 4 Z 向 XY 轴能够移动高度移动
5 X、Y 向归还吸嘴位置移动结束 5 X、Y 开始向安装吸嘴位置移动
6 激光 检测有无吸嘴 ONCE 6 X、Y 向安装吸嘴位置移动结束
7 Z 向归还吸嘴姿态检测高度
移动
7 Z 向滑板+5mm 位置移动
8 激光 检测归还吸嘴姿态 SWEEP 8 θ 移动到吸嘴安装角度
9 θ 向归还吸嘴角度移动 9 Z 等待卸料 10msec
10 滑板 等待开动作结束 Wait C 10 激光 故障检测 ONCE
11 Z 向交换吸嘴位置移动 Wait B 11 Z
向滑板位置移动
2 级控制第 1 次
12 真空 压力上升检测
12 Z 向滑板位置移动
2 级控制第 2 次
13 Z 向滑板能够动作位置移动
13 滑板 闭动作开始 14 真空 Off
14 送风 On 第 1 次 50msec 15 送风 On
15 送风 On 第 2 次 50msec 16 滑板 开动作开始
16 滑板 等待闭动作结束 Wait C 17 Open 传感器 On Wait E
17 Z 向交换吸嘴高度移动 18 送风 Off
18 送风 On 19 Z 向吸嘴安装检测高度移动
19 Z 保持交换吸嘴高度 Wait A 20 激光 检测有无吸嘴 ONCE
20 Z 向检测有无吸嘴高度移动 21 Z 向吸嘴安装姿态检测高度移动
21 激光 检测有无吸嘴 ONCE 22 激光 检测吸嘴安装姿态 SWEEP
22 Z 向 XY 轴可移动高度移动 23 θ 移动到吸嘴安装校正角度
23 送风 Off 24 滑板 闭动作开始
25 Close 传感器 On Wait D
26 Z 向 XY 轴能够移动高度移动
Wait A:50msec Wait B:30msec Wait C:80msec Wait C:80msec Wait E:80msec
吸嘴归还动作(有 θ 校正)
吸嘴安装动作(有 θ 校正)
激光
滑板
Open
传感器
Close
传感器
移动
停止
移动
停止
旋转
停止
计测
非计测
移动
停止
移动
停止
旋转
停止
计测
非计测
激光
滑板
Open
传感器
Close
传感器