KE-2070_2080 動作説明書.pdf - 第82页
R e v 1 . 00c 动作说明书 3- 69 ( M 1 → P ) = B ( M 1 → M 3 ) + A ( M 1 → M 2 ) ⑥ ⑤ ⑥ 式中, M1、M2、M3、P、M1、M2、M3、P 为原点的直交坐标上的位置显示分别作为 (x1、y1)、(x2、y2)、(x3、y3)、(x1、y 1)、(x2、y2)、(x3、y3)、(X、Y) 的话,则为 ( x p 、 y p …
Rev1.00c
动作说明书
3-
68
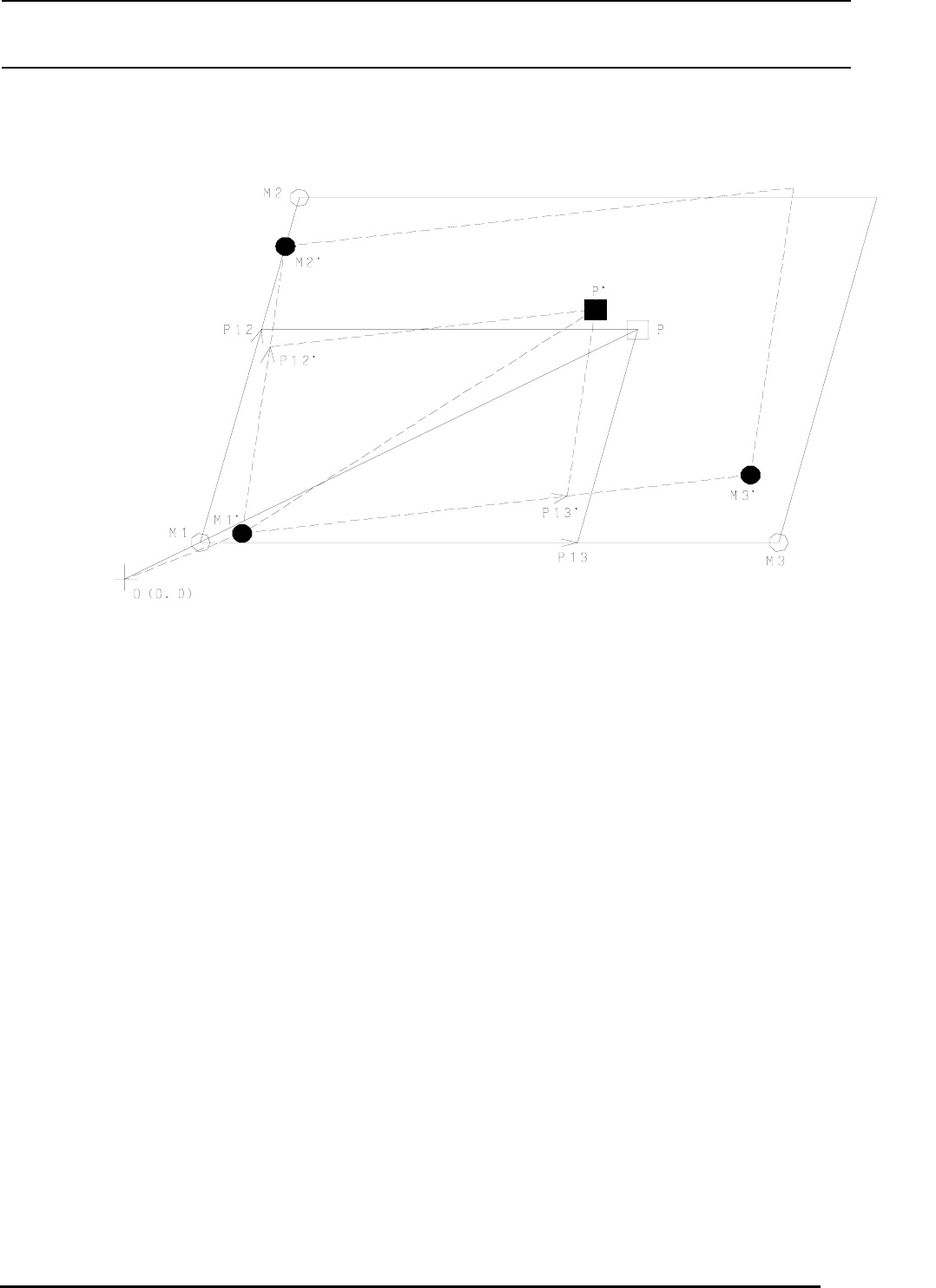
3-12-3 指定标记的修正方法
3点的BOC标识时(区域指定标记也一样)
上图的○显示的点M1,M2,M3是基板数据种的BOC标记坐标,经各个点的识别求得得实际坐标为
●显示的M1、M2、M3时,计算对应贴装数据上的贴装坐标P点(□)的实际贴装坐标P点(■)。
此时,基板也同样地移动、变形的话,让通过M1,M2,M3的 3 点内的 2 点的直线内的 2 条作为坐标
轴的斜交坐标系上的 P 点的坐标值相等,求对应M1,M2,M3的M1、M2、M3的同样的斜交坐标系
上的P点的O为原点的直交坐标上的坐标。
此时,从P向斜交坐标轴平行地引的直线和连接M1、M2的直线,连接P12、M1、M3的直线的焦点作
为P13,P也同样连接M1、M2的直线、连接M1、M3的直线的焦点分别作为P12、P13。
(M1→P)=(M1→P13)+(M1→P12) ①
(M1→P)=(M1→P13)+(M1→P12) ②
即成立以上的关系。
再根据P的定义
|M1→P12|/|M1→M2| =|M1→P12|/|M1→M2| ③
|M1→P13|/|M1→M3| =|M1→P13|/|M1→M3| ④
则成立以上的关系。
这里,把③式的值作为A,把④式的值作为B的式子①②可以表示以下的事情。
(M1→P)=B(M1→M3)+A(M1→M2) ⑤
图3−12−3

Rev1.00c
动作说明书
3-
69
(M1→P)=B(M1→M3)+A(M1→M2) ⑥
⑤⑥式中,M1、M2、M3、P、M1、M2、M3、P为原点的直交坐标上的位置显示分别作为
(x1、y1)、(x2、y2)、(x3、y3)、(x1、y1)、(x2、y2)、(x3、y3)、(X、Y)的话,则为
(xp、yp)−(x1、y1)=B{(x3、y3)−(x1、y1)}+A{(x2、y2)−(x1、y1)}
(X、Y)−(x1、y1)=B{(x3、y3)−(x1、y1)}+A{(x2、y2)−(x1、y1)}。
将此分解到 X 轴 Y 轴的各式中之后,计算
xp−x1=B(x3−x1)+A(x2−x1) ⑦
yp−y1=B(y3−y1)+A(y2−y1) ⑧
X−x1=B(x3−x1)+A(x2−x1) ⑨
Y−y1=B(y3−y1)+A(y2−y1) ⑩
的4元联立方程式。此时,A,B,X,Y以外是已知数值,通过解此 4 元联立方程,可以求得以P的O为
园地按的位置指定(X,Y)。
此时,从⑦⑧计算
A={xp−x1−B(x3−x1)}/(x2−x1)={yp−y1−B(y3−y1)}/(y2−y1) ⑪
B={xp−x1−A(x2−x1)}/(x3−x1)={yp−y1−A(y2−y1)}/(y3−y1) ⑫
式⑪⑫分别为B,则A解为
B={(yp−y1)(x2−x1)−(xp−x1)(y2−y1)}/{(y3−y1)(x2−x1)−(x3−x1)(y2−y1)} ⑬
A={(yp−y1)(x3−x1)−(xp−x1)(y3−y1)}/{(y2−y1)(x3−x1)−(x2−x1)(y3−y1)} ⑭
把此结果求得的A,B代入⑨⑩,就可以方便地计算出X,Y。
另外,式⑬⑭中分母为0时,A,B为无限大,不能进行计算。此时哪个式子都可以成为
(y3−y1)(x2−x1)=(x3−x1)(y2−y1)
用(x2−x1)(x3−x1)除两边之后,得出
(y3−y1)/(x3−x1)=(y2−y1)/(x2−x1)
则M1,M2,M3在 1 直线上。
此时,BOC标记的 3 点无意义,所以为数据异常。
角度修正值θ作为指定(M1→P)和(M→P)的角,经计算可以得出
θ=atan{(X−x1)/(Y−y1)}− atan{(xp−x1)/(yp−y1)}
Rev1.00c
动作说明书
3-
70
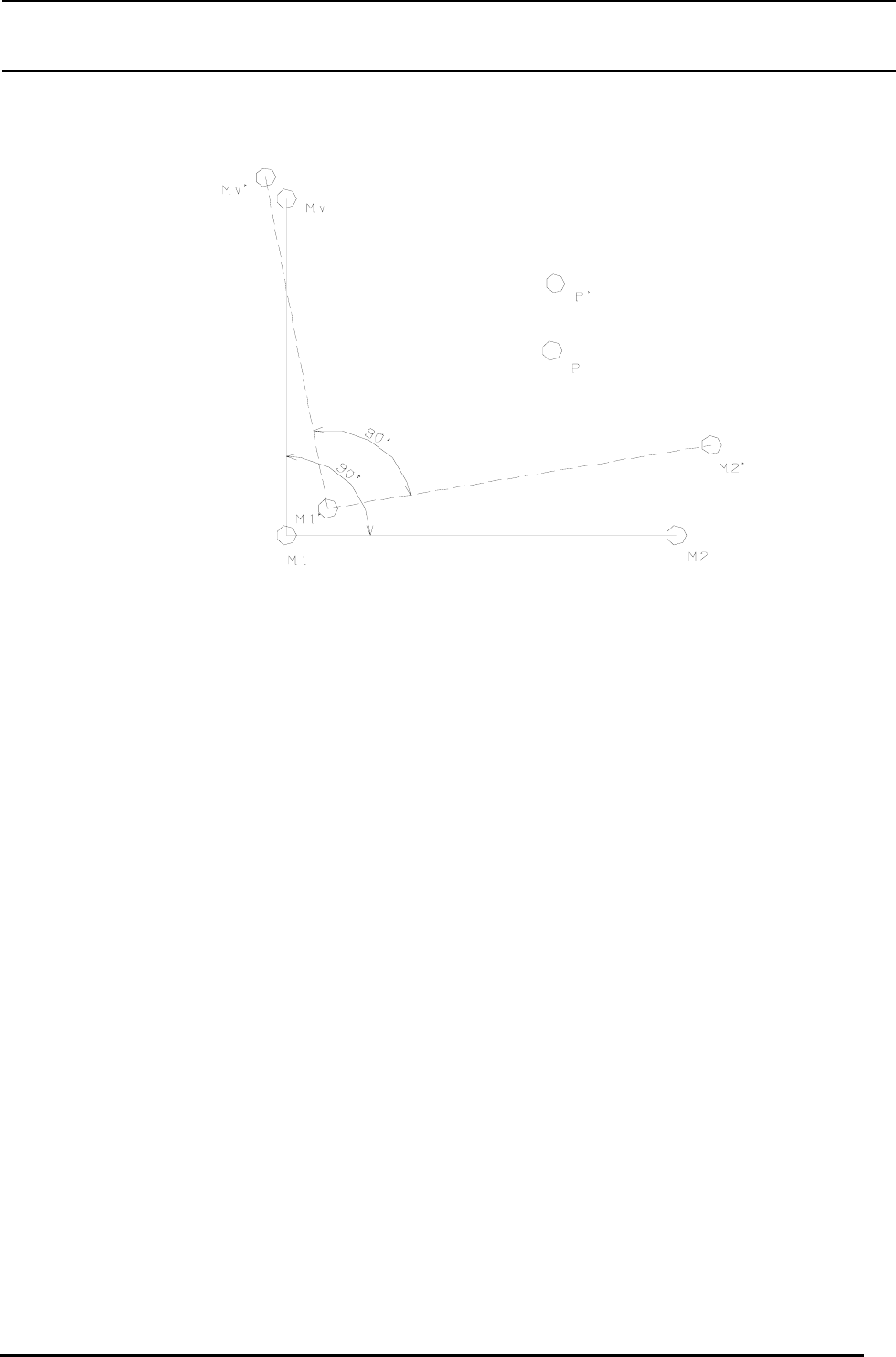
2点的BOC标记时(与区域指定标记相同)
如上图所示,2点的BOC标记的理论坐标为M1、M2,各标记检测的坐标为M1、M2。
此时,把M1点设为中心,把M2点转动90°后的坐标作为Mv,在M1点为中心,把M2点转动90°
后的坐标作为Mv。把Mv、Mv分别作为设想的第 3 点的BOC标记的理论坐标、物理坐标,与M1,M2,
M1、M2一起把第 3 点作为BOC标记时同样,用P点的坐标计算出P点坐标,进行坐标修正。
图3−12−4