KE-2070_2080 動作説明書.pdf - 第48页
R e v 1 . 00c 动作说明书 3- 35 3-7 真空同步时间 3-7-1 元件类别的分类 部品種別〔0〕∼〔 49〕の分類 〔0 〕 角チップ (1005 以上) 〔11 〕 PLCC(QFJ) 〔23 〕 拡張リードコネクタ 〔35 〕 日本TI Micro BGA 〔0 〕 角チップ (0603) 〔12 〕 TSOP 〔24 〕 外形センタリング 部品 〔36 〕 DIMMコネクタ 〔1 〕 メルフ 〔13 〕 TSO…
Rev1.00c
动作说明书
3-
34
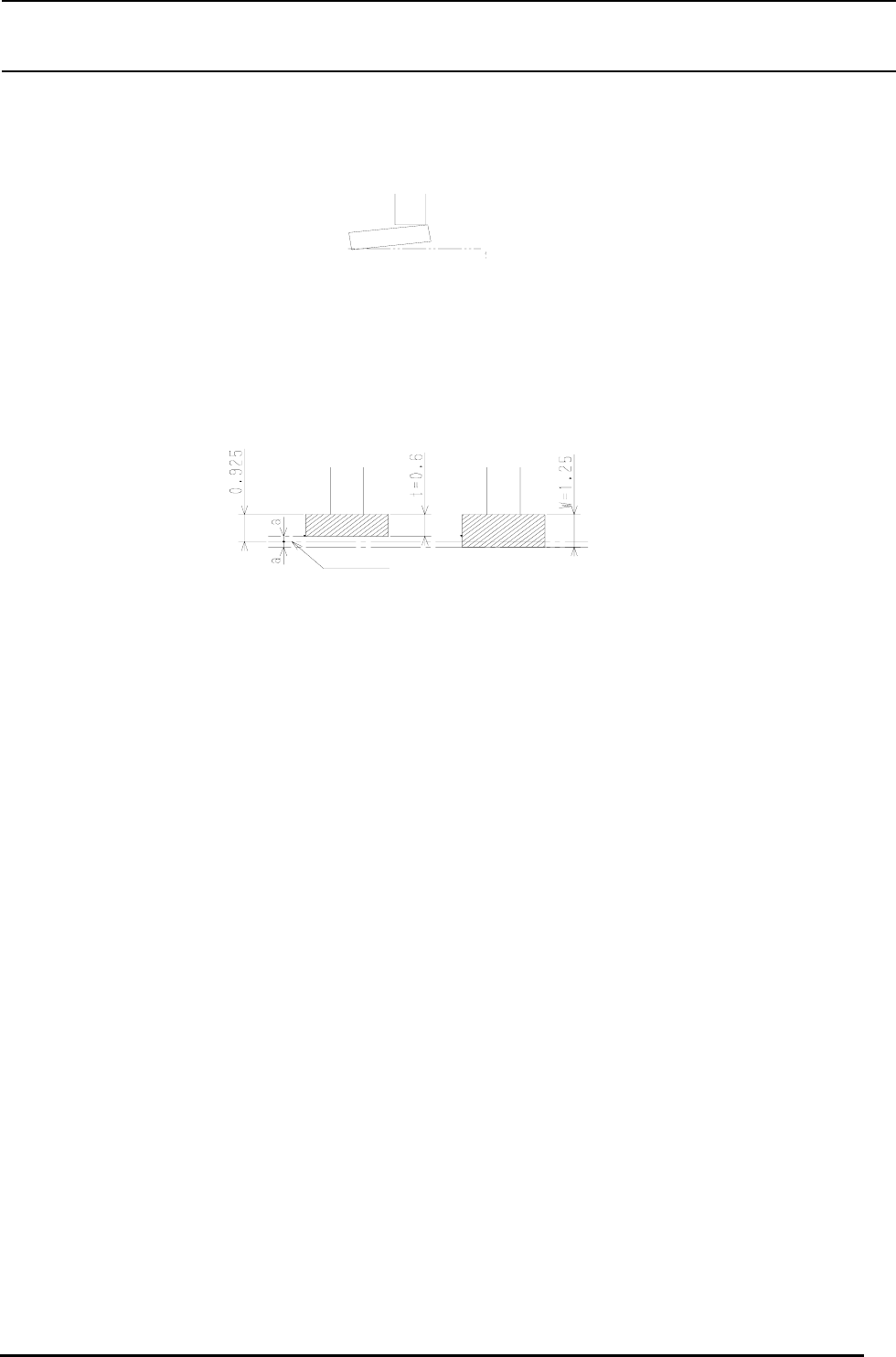
3)有时因元件的吸附状态,被判定为跳起。例如,2125R时,元件下面和Scan高度的间隙为0.15
mm 时,检测为倾斜吸附状态,因而被退出。
激光
Scan高度
此时因为固定位置有问题,需要进行纠正。
由于芯片跳起检测高度可以在各元件的元件数据中改变设定值,因而有些尺寸的元件也能够再倒向安全
侧。
〔2125R〕时
正常吸附
横向吸附
间隙中央
激光
Scan高度
上述元件尺寸计算的错误值是1.25× t =0.75mm,如果激光对准正常吸附和横跳起吸附间隙的中
央时,则为
( t+W)/2=(0.6+1.25)/2=0.925mm。
因此,此元件,因吸附状态发生退出的话,把检测高度变更为0.925的话会有效果。
但是,( t+W)/2的计算方法,并不能适用于所有的元件,请加以注意。
厚度( t )和宽度(W)尺寸相同的元件(1608C、1005C)时,( t+W)/2= t,因此虽然能正常吸附
但是有时也被退出。
1608C时, t=0.8mm、W=0.8mm
芯片跳起检测高度为 H=(0.8+0.8)/2=0.8mm。
注)在历来的机型中,短边 0.25mm 以上、不足 0.45mm 的元件系数是 1.1,但由于会产生芯片跳
起的过频测出错误,所以改变为 1.2。同时,0.25mm 以下的元件系数设为 1.25。
Rev1.00c
动作说明书
3-
35
3-7 真空同步时间
3-7-1 元件类别的分类
部品種別〔0〕∼〔
49〕の分類
〔0
〕
角チップ (1005
以上)
〔11
〕
PLCC(QFJ) 〔23
〕
拡張リードコネクタ 〔35
〕
日本TI Micro BGA
〔0
〕
角チップ
(0603)
〔12
〕
TSOP 〔24
〕
外形センタリング
部品
〔36
〕
DIMMコネクタ
〔1
〕
メルフ 〔13
〕
TSOP
2
〔25
〕
外形認識部品 〔37
〕
トランス(左上切欠
け)
〔2
〕
アルミ電解
コンデンサ
〔14
〕
BQFP(バンパ
付QFP)
〔26
〕
その他コネクタ 〔38
〕
トランス(右上切欠
け)
〔3
〕
ネットワーク
抵抗
〔15
〕
BGA(PBGA) 〔27
〕
Jリードソケット 〔39
〕
トランス(左下切欠
け)
〔4
〕
トリマ 〔16
〕
CBGA 〔28
〕
ガルウイングソケット 〔40
〕
トランス(右下切欠
け)
〔5
〕
SOT 〔17
〕
ヒートシンク
付きSOP
〔29
〕
バンパ付
ソケット
〔41〕∼〔
48〕
Resarve
〔6
〕
SOJ 〔18
〕
FBGA(CSP) 〔30
〕
その他 IC
ソケット
〔49
〕
その他部品
〔7
〕
GaAsFET 〔19
〕
その他IC
部品
〔31
〕
HIC(基板部品
)
〔8
〕
その他チップ
部品
〔20
〕
一方向リードコネクタ 〔32
〕
エレメント
部品
〔9
〕
SOP 〔21
〕
二方向リードコネクタ 〔33
〕
エレメント
部品
〔10
〕
QFP 〔22
〕
Zリードコネクタ 〔34
〕
エレメント
部品
インデ
ックス
部品種別
0 [10][12
]∼[40]
1〔9〕〔
11〕
2〔1〕∼〔
8〕
3[0] 角チップ
(1005以上)
4[0] 角チップ
(0603)
元件种 类 〔 0〕∼〔49〕的分类
方芯片(1005以上)
方芯片(1603)
柱形元件
铝电解 电 容器
网 络电阻
有机膜可变电容器
其他芯片元件
BQFP( 带 防 护 QF P)
散 热 SOP
其他IC元件
双方向引脚连 接器
单 方向引脚连 接器
Z引脚连 接器 器件元件
器件元件
器件元件
HI C( 基板元件)
其他IC插座
带 防 护 插座
侧 翼插座
J引脚插座
其他连 接器
外形识别元件
外形中心元件
扩 展引脚连 接器 日本TI Mi cr o BGA
DI MM连 接器
变压器 ( 左上欠缺)
其他元件
变压器 ( 右上欠缺)
变压器 ( 左下欠缺)
变压器 ( 右下欠缺)
系数 元件类别
方芯片
方芯片
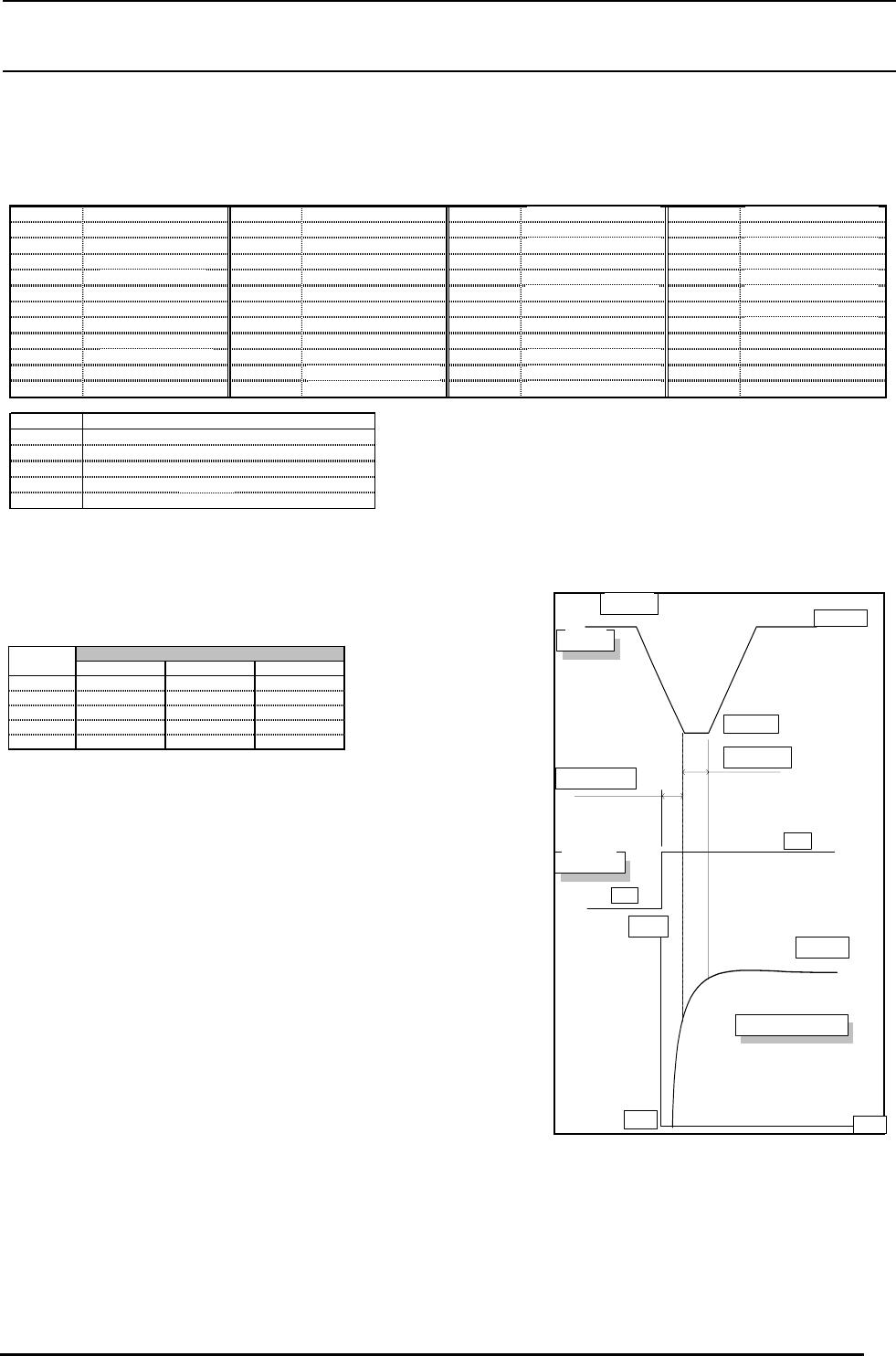
3-7-2 吸附时的真空同步时间
nPickVacOn、nPickVacCorr、nPickHoldは、Z軸下降完了を0として時間軸の+方向を正、―方向を負とする。
吸着時のメカ制御パラメータのDefault値
DEFAULT値
インデックス nPickVacOn nPickVacCorr nPickHold
00 0 50
10 0 30
2-20 5 5
3 -20 10 5
4 -20 10 5
(注) nPickVacOn、nPickVacCorr、nPickHoldは、メカ制御パラメータに保存され変更可能なこと。
〔吸着バキューム制御のメカ制御パラメータ〕
W.Pick.Vac.On:吸着Z下降完了からさかのぼって、バキューム電磁弁をONするまでの時間。
nPickHold:吸着下降中の時間で、部品サイズにより吸着時間を変えて、吸着力を安定させる。
部品サイズの大きいものほど、タイマ値は長くする必要がある。
W.Pick.Vac.ON の計算式
W.Pick.Vack.On = nPickVacOn + nPickVacCorr MSパラメータのバキュームキャリブレーションに値が未入力
W.Pick.Vack.On = - wTime2 + nPickHold + nPickVacCor
r
MSパラメータのバキュームキャリブレーションに値が入力済
(注) W.Pick.Vac.On が、正の値の時はZ軸下降完了と同時にバキューム電磁弁をONする。
負の値の時は吸着下降完了からさかのぼってバキューム電磁弁をONする。
(例) MSパラメータのバキュームキャリブレーションに値が未入力
インデックス 3 の場合は、w.Pick.Vac.On = nPickVacOn + nPickVacCorr
= -20+10
=-10
吸着下降完了から10 ms さかのぼって、バキューム電磁弁をOnする。
(例) MSパラメータのバキュームキャリブレーションに値が入力済
部品種が インデックス 0 で、wTime2 = 34 の場合は、w.Pick.Vac.On = - wTime2 + nPickHold + nPickVacCorr
= -34+50+0
=16
w.Pick.Vac.On が正の値であるため、Z軸下降完了と同時にバキューム電磁弁をOnする。
W.Pick.Vac.ON
Z軸上昇位置
Z軸上昇位置
Z軸下降位置
Z軸動作
nPickHold
VAC 電磁弁
ON
OFF
ノズル内真空圧の変化
時間
真空圧
真空到達圧
大気圧
nPi ckVacOf f 、nPi ckVacCorr 、 nPickBlowOn、 nPickBlowTime、 nPi ckHol d以 Z轴 下降完了作为 0, 时间轴的+
方向为 正,−方向为负。
吸附时 的机械控制参数的Def a ul t 值
系数
(注 )nPickVacOff、 nPi ckVacCorr、 nPickBlowOn、 nPickBlowTime、nPi ckHol d可以变 更保存到机械控制参数。
〔吸附真空控制的机械控制参数〕
W.Pick.Vac.On:吸附Z轴 下降完了反转 Vac至 电 磁 阀 ON的 时间。
nPickScrapHold:吸附Z轴 下降的时间根据元件尺寸变 更吸附时间,以稳 定吸附力。
元件尺寸越大,定时 器指需要越长。
W.Pick.Vac.ON的 计 算式
W. Pi ck. Vack. On=nPi ckVacOn+nPi ckVacCorr MS参数的真空载 荷未输 入 值 。
W.Pick.Vac.On=-wTime6+nPi ckHol d+nPi ckVacCor MS参数的真空载 荷已输 入 值 。
(注 )W.Pick.Vac.On为 正 值时, Z轴 下降完了之后同时 真空电磁 阀 On 。
负值时,吸附下降完了之后,反转 真空电 磁阀
On。
(例 )MS参数的真空载 荷 为输入 值
系数3时 , w. Pi ck. Vac. On = nPi ckVacOn + nPi ckVacCor r
= -20+10
= -10
贴 装下降完了之后,反转 10ms真空电 磁 阀 On 。
(例 )MS参数的真空载 荷已输 入 值
元件种类为系数0, wT i me2 = 34时, w.Pick.Vac.On = wTime2 + nPi ckHol d + nPi ckVacCorr
= -34+50+0
= 16
w.Pick.Vac.On为 正值 ,因此Z轴 下降完了之后,同时 真空电 磁 阀On 。
Z轴 上升位置
Z轴 上升位置
Z轴动作
Z轴 下降位置
VAC电 磁 阀
真空压
到 达 真空压
吸嘴内真空压 的 变 化
大气压
时间
(校正前)
20-12
8
34-50+0
-16
DEFAULT値
インデックス nPickVacOn nPickVacCorr nPickHold
00 0 50
10 0 30
220-510
3 20 -12 10
4 20 -15 15
系数
吸附元件时,Z 轴吸附下降完了之后,决定 VAC 电磁阀 OFF 时间。

Rev1.00c
动作说明书
3-
36
各词汇的意义如下。
nPickVacOn : 「机械控制参数」「其他」「真空」「元件种类真空同步时间」「吸附」「真空开始同步时间」
nPickVacCorr : 「机械控制参数」「其他」「真空」「元件种类真空同步时间」「吸附」「真空开始修正值」
nPickHold : 「机械控制参数」「其他」「真空」「元件种类真空同步时间」「吸附」「真空稳定待机时间」
上述,吸附时的机械控制参数的 Default 值的表上有各指标的数值。
「自我校准」「真空校准」「生产使用值」「V.CAL」
wTime2 :「真空到达时间」 具有各贴装头的数值。