KE-2070_2080 動作説明書.pdf - 第71页
R e v 1 . 00c 动作说明书 3- 58 实效元件对角尺寸 88.00mm 以下的视觉识别补弦元件, XY 移动可能的高度 (SZ) 控制识别样子。 实效元 件对角尺寸超过 88.00mm 的视觉识别元件, 在大型元件转动高度控制识别控制, 但是大型元件转动, XY 轴移动可能的高度低时,在 XY 可能移动的高度,控制识别样子。 ( 元件高度 (T)+ 元件深度 (D) 在 4.00mm 以下时 ) 贴装角度和识别样子相同的元…
Rev1.00c
动作说明书
3-
57
3-11-6 大型视觉元件高度控制
不与激光传感器相干扰的元件各格度成为转动高度。
KE2020/40 不 FMLA 传感器干扰,KE2060/80 与 MNLA 传感器元件也相干扰。
通常,元件旋转高度与 XY 移动高度是相同高度。
KE2060/80 的实效元件对角尺寸超过 88.00mm 的视觉识别元件时,以下的大型元件转动高度(RZ)有可能
限制高度。
XY 移动高度作为 SZ 的话,激光传感器下面设计上为 SZ+4.00mm。
XY 移动高度 SZ 是元件高度规格缉办的最大翘取量(2.00mm)和退避高度(1.00mm)的合计高度。
把元件高度作为 T,把元件深度作为 D 之后,大型元件旋转高度 RZ 用以下的式子表示。
RZ = SZ + 4.00mm - D - T(RZ 为元件最下面的高度)
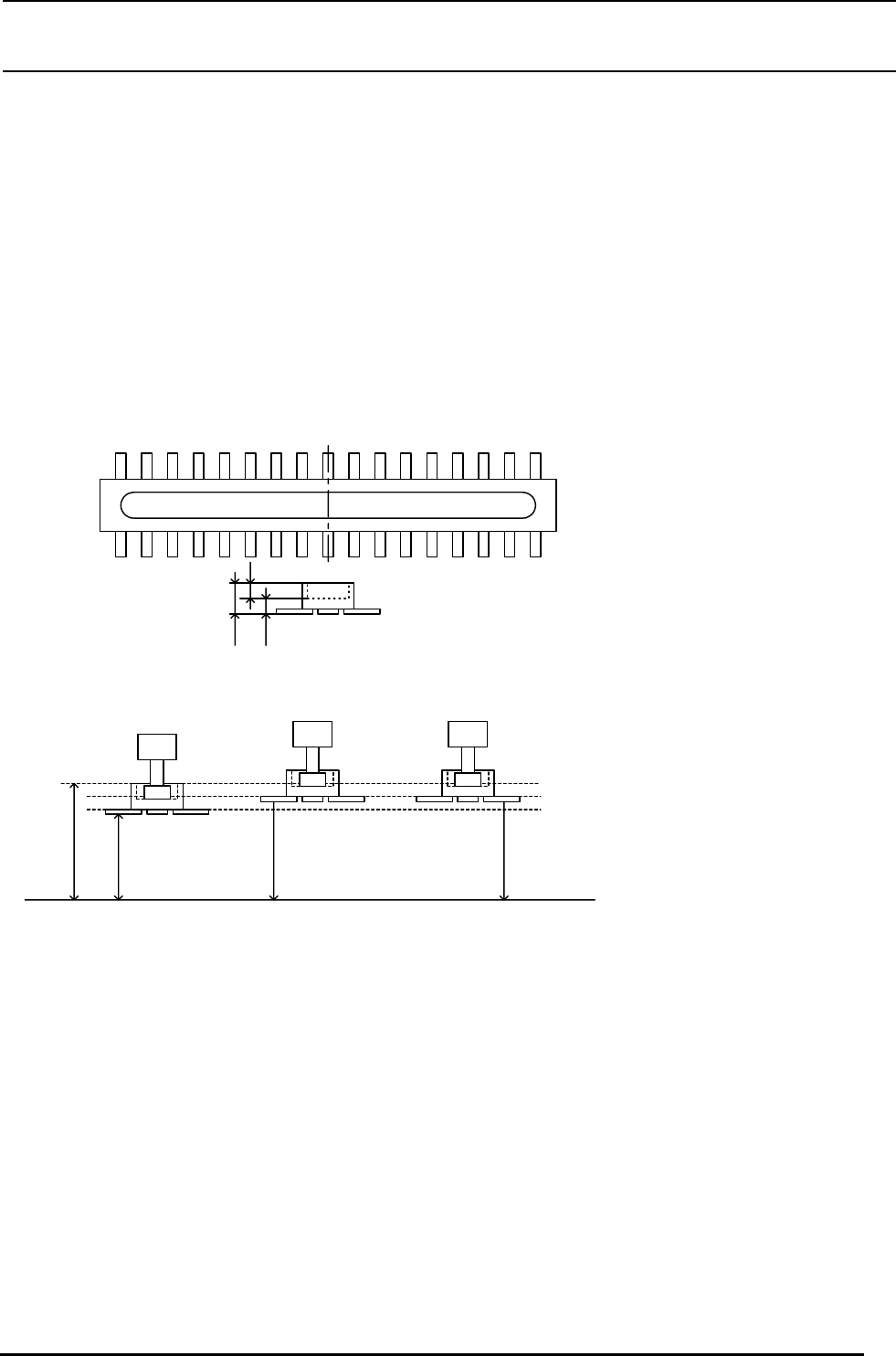
T
D
TD
图3−11−4 各部尺寸要求
SZ+4.00mm
レーザーセンサ最下面
回転高さ
RZ
SZ
XY移動可能高さ VCS認識高さ
SZ
图3-1−5 各高度概要
旋转高度 XY 可以移动高度 VCS 识别高度
激光传感器最下面
Rev1.00c
动作说明书
3-
58
实效元件对角尺寸 88.00mm 以下的视觉识别补弦元件,XY 移动可能的高度(SZ)控制识别样子。实效元
件对角尺寸超过 88.00mm 的视觉识别元件,在大型元件转动高度控制识别控制,但是大型元件转动,XY
轴移动可能的高度低时,在 XY 可能移动的高度,控制识别样子。 (元件高度(T)+元件深度(D)在 4.00mm
以下时)
贴装角度和识别样子相同的元件,在吸附元件时可能转动高度(XY 可能移动高度),被贴装样子控制样
子之后,识别贴装。在贴装点,XY 修正动作后,在可能转动高度(XY 可能移动高度),仅被θ修正,然
后移动到贴装高度。
一方面,贴装角度和识别样子不同的元件(纵长识别,吸附元件时,在可能吸附高度(XY 可恩g移动高
度),被纵长姿势控制识别样子之后被识别。在贴装点,XY 修正动作后,在可能转动高度(XY 可能移动高
度),被贴装样子+θ修正,然后移动到贴装高度。
识别样子,通过元件外形尺寸、VCS 识别偏差(XY)、贴装角度、照明参数等,贴片机自动生成,因此
拥护不能指定。
Rev1.00c
动作说明书
3-
59
基板上面高
さ
吸着高
さ
吸着
搭載高
さ
搭載
回転高
さ
吸着
XY移動可能高
さ
吸着
VCS認識高
さ
認識
XY移動可能高
さ
搭載
回転高
さ
搭載
画像焦点高
さ
部品移動可能高
さ
センサ下面高
さ
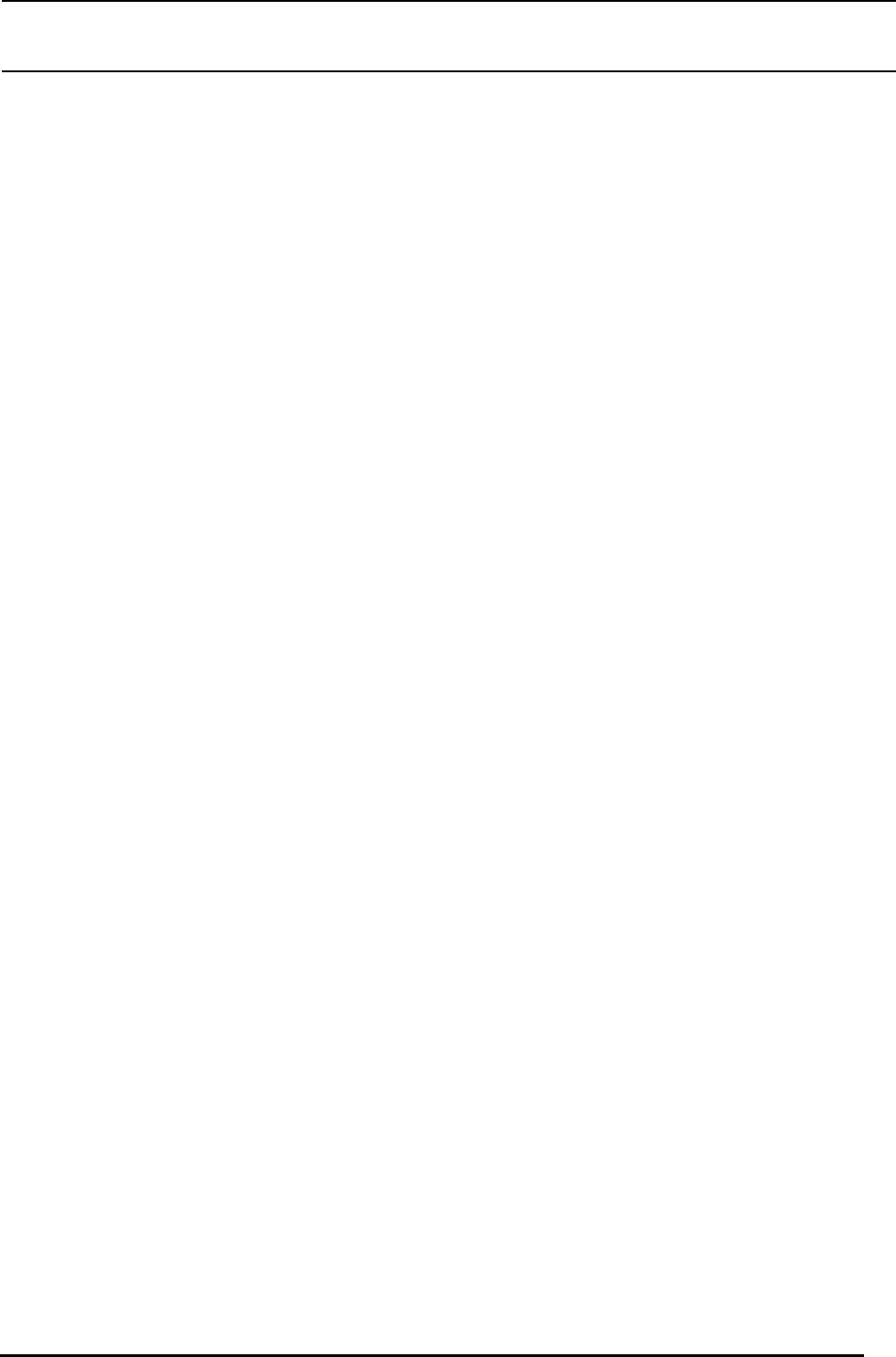
吸附 吸附 吸附
识别
贴装 贴装 贴装
吸附高度
转动高度
XY可以移动高度 VCS识别高度
XY可能移动高度 转动高度 贴装高度
元件可能移动高度
基板上面高度
传感器下面高度
图像焦点高度
图3−11−6 大型元件的吸附、识别、贴装面的高度控制变化
吸着高さ
吸着
回転高さ
吸着
XY移動可能高さ
吸着
VCS認識高さ
認識
XY移動可能高さ
搭載
回転高さ
搭載
搭載高さ
搭載
基板上面高さ
センサ下面高さ
部品移動可能高さ
画像焦点高さ
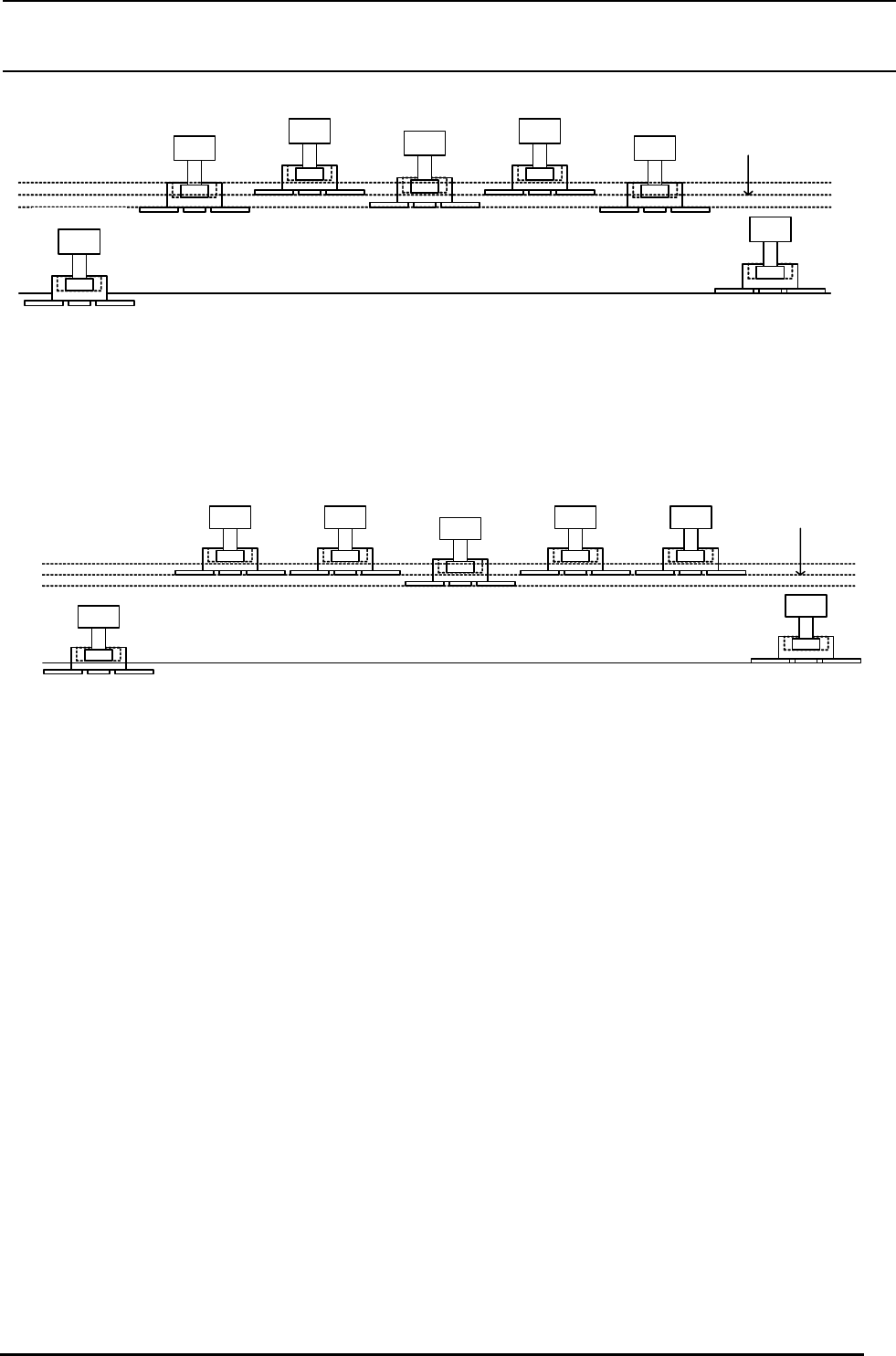
吸附
吸附 吸附
识别
贴装 贴装
贴装
元件可能移动高度
吸附高度 转动高度 XY可能移动高度 VCS识别高度 XY可能移动高度 转动高度 贴装高度
传感器下面高度
基板上面高度
图3−11−7 中小型元件的吸附、识别、贴装面的高度控制变化