KE-2070_2080 動作説明書.pdf - 第111页
R e v 1 . 00c 动作说明书 5- 19 5-2 马达的控制方式 5-2-1 XY 轴的控制方式 X 、 Y s 轴均由 2 台电动机进行串联驱动,控制采用全闭环控制方式,进行元件贴装头的移动控制。 X 轴及 Y 轴的控制组成图如下所示。 5−2−1 位置运动控制板 CH1 CH 2 CPCI 接口 检测头 XL 轴 放大器 UVW 相驱动输出 编码器输出 (三菱串行) 磁尺 编码器输出 A BZ 相 XR 轴 放大器 编码器…
Rev1.00c
动作说明书
5-
18
⑤ 机种和安装的照明装置
KE−2070:OCC照明装置(左)
KE−2080:OCC照明装置(左)、OCC照明装置(右)、VCS照明
5-1-11
IP−X3R机板
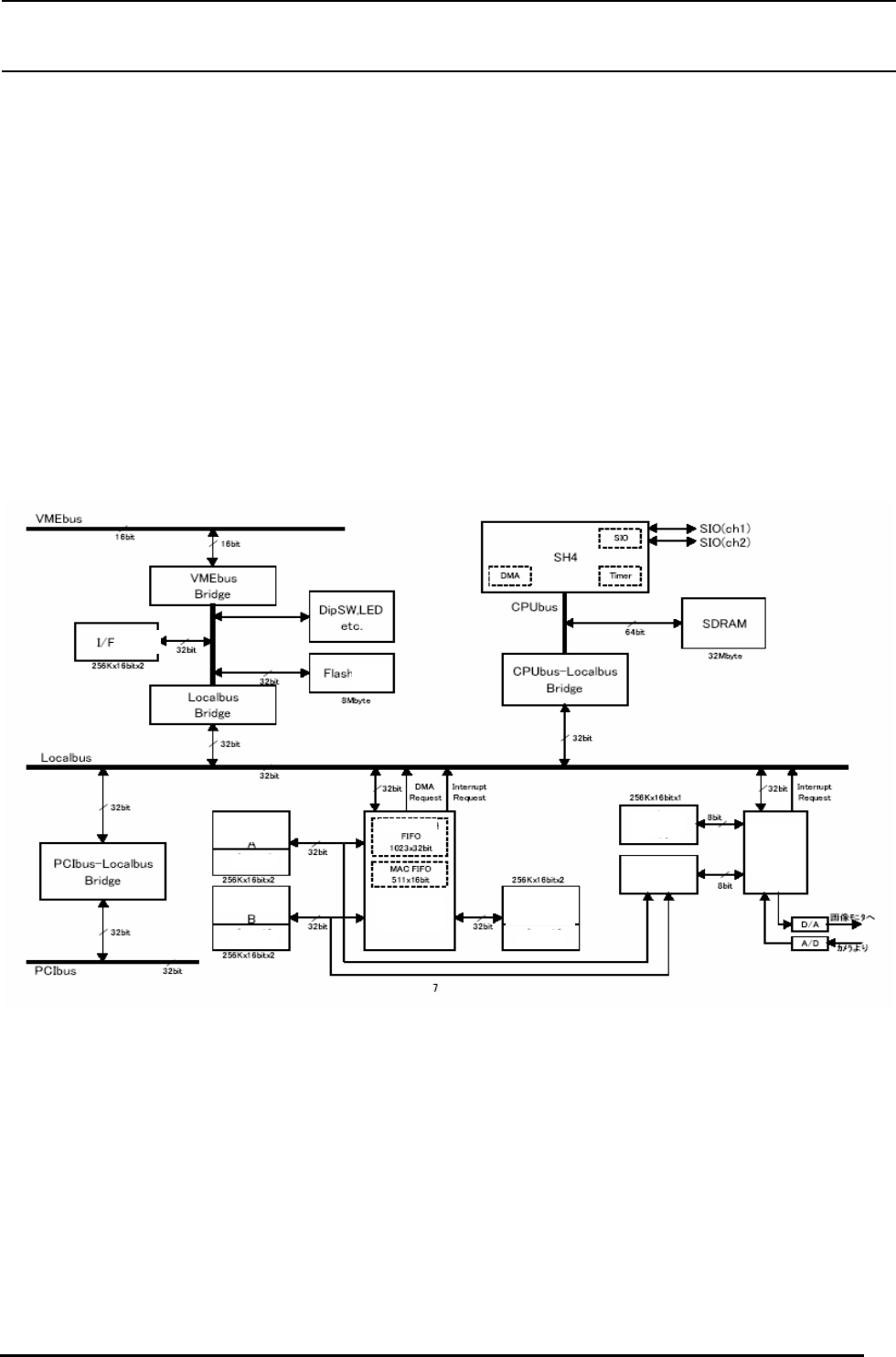
本基板是处理OCC、VCS摄像机拍摄的基板标记、IC标记、IC芯片等图像数据,计算基板的位置修正、
元件位置修正需要的数值的图像基板。图 1 是基板方块图。
存 储
器
存 储
器
录 像存储 器
录 像存储 器
演算结 果
图 像 处 理
装置
锥 型
锥 型
样 品存储 器
锥 型
覆盖
存 储 器
图 像数据
选择器
图 像
输 出入
装置
图5−1−4 IP−X3R基板方块图
Rev1.00c
动作说明书
5-
19
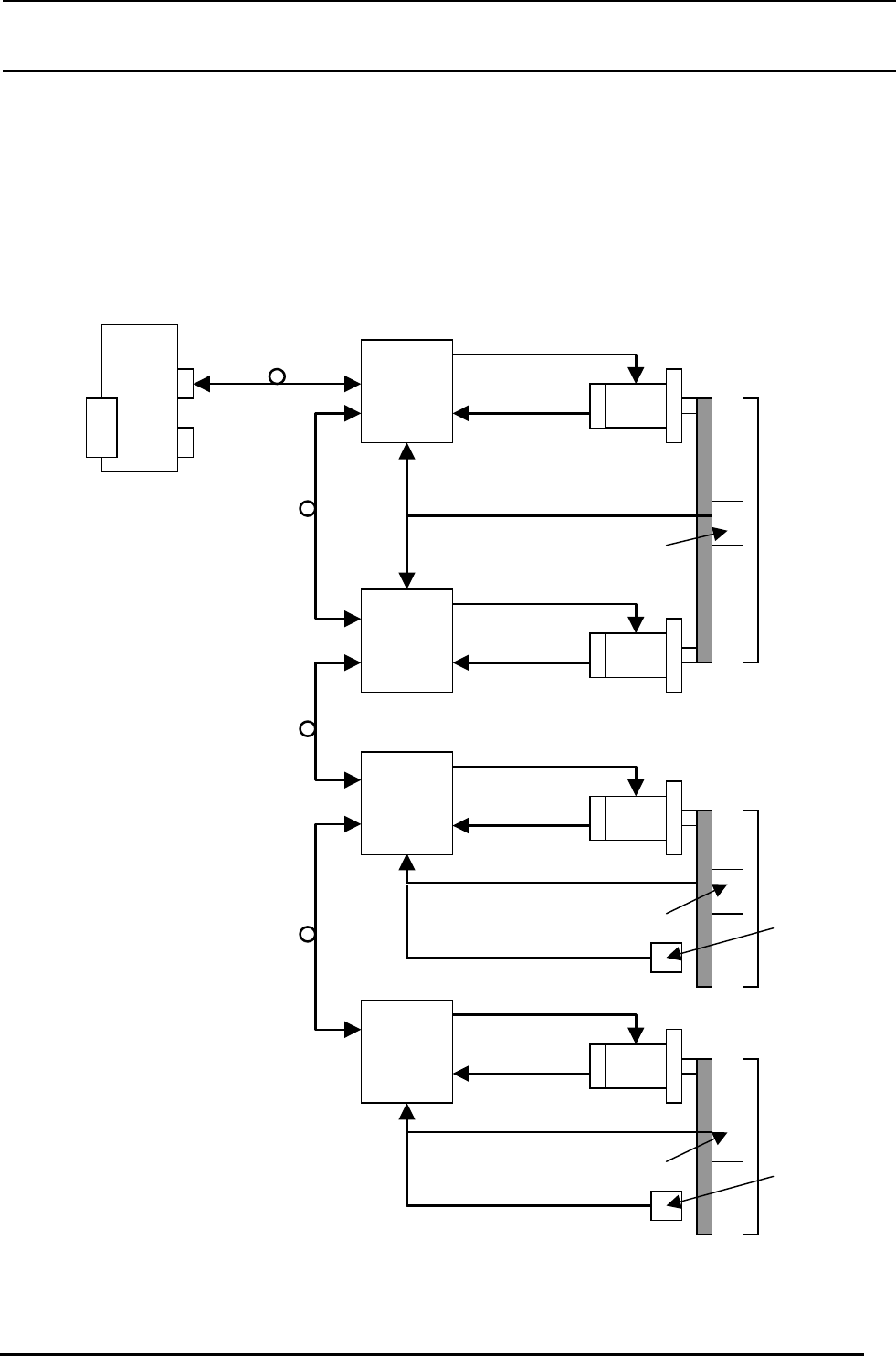
5-2 马达的控制方式
5-2-1 XY 轴的控制方式
X、Y s轴均由 2 台电动机进行串联驱动,控制采用全闭环控制方式,进行元件贴装头的移动控制。
X 轴及 Y 轴的控制组成图如下所示。
5−2−1
位置运动控制板
CH1
CH 2
CPCI
接口
检测头
XL 轴
放大器
UVW 相驱动输出
编码器输出
(三菱串行)
磁尺
编码器输出
A
BZ 相
XR 轴
放大器
编码器输出
(三菱串行)
SSCNETⅢ
光通信
SSCNETⅢ
光通信
YR 轴
放大器
编码器输出
A
B 相
编码器输出
(三菱串行)
Z 相传感器
Z 相
Z 相
YL 轴
放大器
编码器输出
(三菱串行)
编码器输出
A
B 相
SSCNETⅢ
光通信
SSCNETⅢ
光通信
检测头
检测头
磁尺
磁尺
UVW 相驱动输出
UVW 相驱动输出
UVW 相驱动输出
Z 相传感器

Rev1.00c
动作说明书
5-
20
各 XL、XR、YL、YR 驱动器的控制,采用三菱运动控制系统,即 SSCNET,以光 50Mbps 的通信速
度进行 0.44ms 周期的电动机控制。
控制时,X 轴 Y 轴都利用全闭环控制驱动,外部编码器采用分辨率为 1µm 的磁性标尺。
X 轴驱动使用 XL 电动机、XR 电动机,电动机的控制以 XL 电动机为主动轴,以 XR 电动机为从动轴,
在同一的控制指令下进行工作。
来自磁性标尺的位置信息,是将一个检测头送来的信息分配给 XL、XR 侧,被输入到各电机驱动器。
Y 轴驱动使用 YL 电动机、YR 电动机,电动机的控制以 YL 电动机为主动轴,以 YR 电动机为从动轴,
在同一的控制指令下进行工作。
来自磁性标尺的位置信息,是 YL 侧和 YR 侧各自拥有,被输入到各电机驱动器。YL、YR 的微小偏移通
过原点复归动作校正。