KE-2070_2080 動作説明書.pdf - 第69页
R e v 1 . 00c 动作说明书 3- 56 3-11-5 大型视觉元件识别样子的控制 视觉识别元件在元件吸附时和元件贴装值以及元件废弃时以外不用识别样子控制。 超过实效元件对角 尺寸 88.00mm 的视觉识别元件, 激光传感器 (MNLA 和吸附躲避相碰的元件时, 实行纵长样子的识别样子 控制。此时,转动元件的高度和 XY 移动时的高度不同。实效元件对角线尺寸 88.00mm 以下的视觉识别 元件, XY 移动时的高度和元件转…

Rev1.00c
动作说明书
3-
55
3-11-4 元件分类的照明无效值
如上所述,大多数的元件反射照明的标准照明为无效值。
基板型 BGA(全球全、外周球)侧照明蓝侧照明为无效。
基板型 BGA 场栅排列为反射照明 LGA 照明无效。
陶瓷型 BGA(全球、外周球)为反射照明的 CBGA 照明。
外形识别元件、反射照明,透过照明比反射照明稳定。
透过照明不作为适用元件尺寸限制的照明而设定。
透过照明可以设定标准照明和小元件用照明。
元件种类 反射照明 透过照明 蓝色照明 红色照明
基板型゚BGA - - 无效 可选择
*1
陶瓷型 BGA 无效 - - -
场栅排列 无效 - - -
基板型゚FBGA - - 无效 可选择
*1
陶瓷型 FBGA 无效 - - -
外形识别元件 无效 可选择
*2
- -
其他元件 无效 可选择
*2
- -
*1
存取使用蓝色相材料元件时。
*2
外形尺寸
□
3.00∼10.00mm,小元件照明
□
10.01mm∼,适用标准照明。
外形识别元件以外,短边 35.00mm 以上的元件不能用透过照明来识别。
外形识别元件(或通用视觉元件的边、角识别)可以适用短边 50.00mm 以下的元件透过照明。
分割识别时的最大尺寸长边 120.00mm 以下(仅适用标准 VCS 时,高分辨率 VCS 的透过照明分割识别不
适用)。
关与这些透过照明设定的参数自动生成、整合性检查不对应。
透过照明是作为反射照明的辅助照明。 请尽可能使用反射照明。
Rev1.00c
动作说明书
3-
56
3-11-5 大型视觉元件识别样子的控制
视觉识别元件在元件吸附时和元件贴装值以及元件废弃时以外不用识别样子控制。超过实效元件对角
尺寸 88.00mm 的视觉识别元件,激光传感器(MNLA 和吸附躲避相碰的元件时,实行纵长样子的识别样子
控制。此时,转动元件的高度和 XY 移动时的高度不同。实效元件对角线尺寸 88.00mm 以下的视觉识别
元件,XY 移动时的高度和元件转动高度相同。
※1
动态分割识别可以适用的元件(标准 VCS,长边:50.01∼74.00mm, 短边:3.00∼50.00mm,高分辨率 VCS
时长边:24.01∼48.00mm,短边:3.00∼24.00mm)以及一次识别元件的贴装角度控制元件识别样子。
但是,指定了透过照明之后,长边超过 48.00mm 控制纵长样子的识别样子控制(仅标准 VCS 时)。
※1
动态分割识别不时用的元件(标准 VCS,长边:74.01∼150.00mm,短边:3.00∼50.00mm,高分辨率 VCS
的长边:48.01∼72.00mm,短边:3.00∼24.00mm)以及纵 3 分割指定元件,时常控制纵长样子的识别样子。
纵 2 横 2 分割元件(标准 VCS 的长边:50.01∼100.00mm,短边: 50.01∼74.00mm,高分辨率 VCS 的长
边:24.01∼48.00mm,短边:24.01∼48.00mm)的贴装角度,控制元件识别样子。
※1 都台分割识别的内容请参照3−4−6−2。
Rev1.00c
动作说明书
3-
57
3-11-6 大型视觉元件高度控制
不与激光传感器相干扰的元件各格度成为转动高度。
KE2020/40 不 FMLA 传感器干扰,KE2060/80 与 MNLA 传感器元件也相干扰。
通常,元件旋转高度与 XY 移动高度是相同高度。
KE2060/80 的实效元件对角尺寸超过 88.00mm 的视觉识别元件时,以下的大型元件转动高度(RZ)有可能
限制高度。
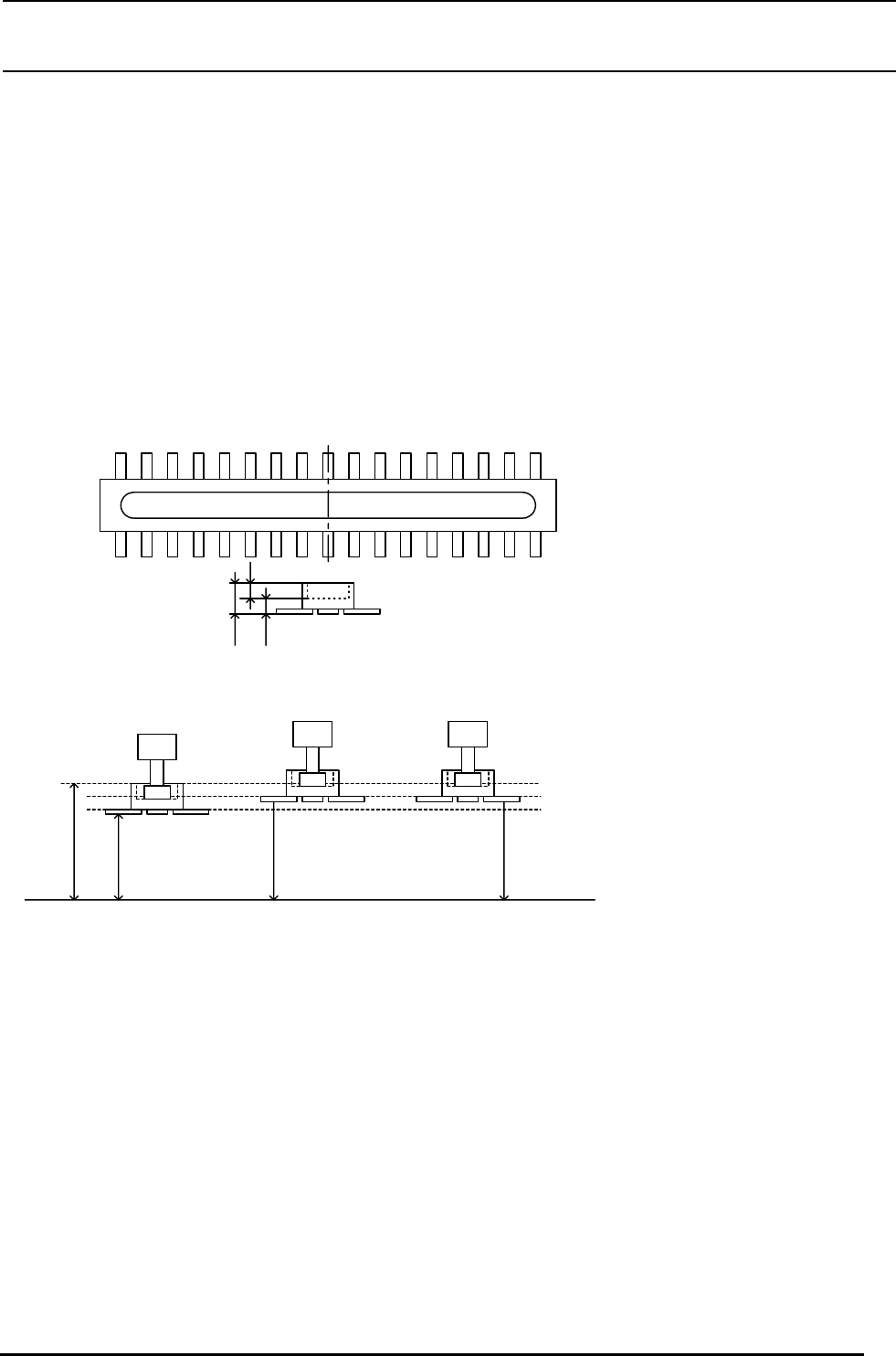
XY 移动高度作为 SZ 的话,激光传感器下面设计上为 SZ+4.00mm。
XY 移动高度 SZ 是元件高度规格缉办的最大翘取量(2.00mm)和退避高度(1.00mm)的合计高度。
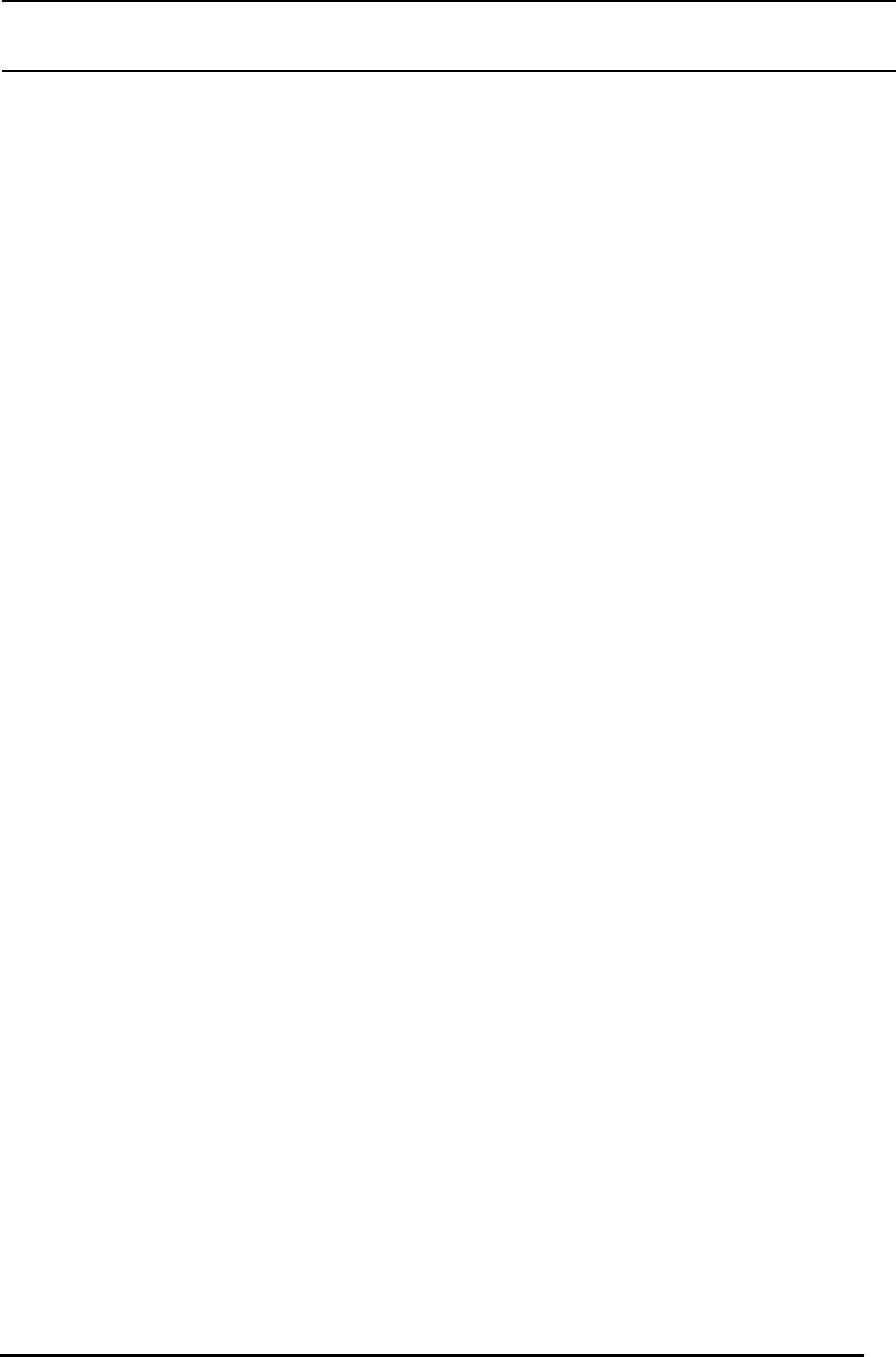
把元件高度作为 T,把元件深度作为 D 之后,大型元件旋转高度 RZ 用以下的式子表示。
RZ = SZ + 4.00mm - D - T(RZ 为元件最下面的高度)
T
D
TD
图3−11−4 各部尺寸要求
SZ+4.00mm
レーザーセンサ最下面
回転高さ
RZ
SZ
XY移動可能高さ VCS認識高さ
SZ
图3-1−5 各高度概要
旋转高度 XY 可以移动高度 VCS 识别高度
激光传感器最下面