KE-2070_2080 動作説明書.pdf - 第73页
R e v 1 . 00c 动作说明书 3- 60 3-11-7 大型视觉元件和已贴装元件的元件高度限制 大型视觉识别元件 ( 实效元件对角线尺寸超过 88.00mm 的视觉识别元件,贴装了比以前元件高度高的元 件之后, 有可能与已贴装的元件相碰, 经指定位置等贴装了大型视觉识别元件后, 请指定比元件高度高 的元件贴装。另外,大型视觉识别元件的贴装坐标互相干涉的位置,有可能不能贴装元件。 把元件高度 T 、元件深度 D 的合计值 (T+…
Rev1.00c
动作说明书
3-
59
基板上面高
さ
吸着高
さ
吸着
搭載高
さ
搭載
回転高
さ
吸着
XY移動可能高
さ
吸着
VCS認識高
さ
認識
XY移動可能高
さ
搭載
回転高
さ
搭載
画像焦点高
さ
部品移動可能高
さ
センサ下面高
さ
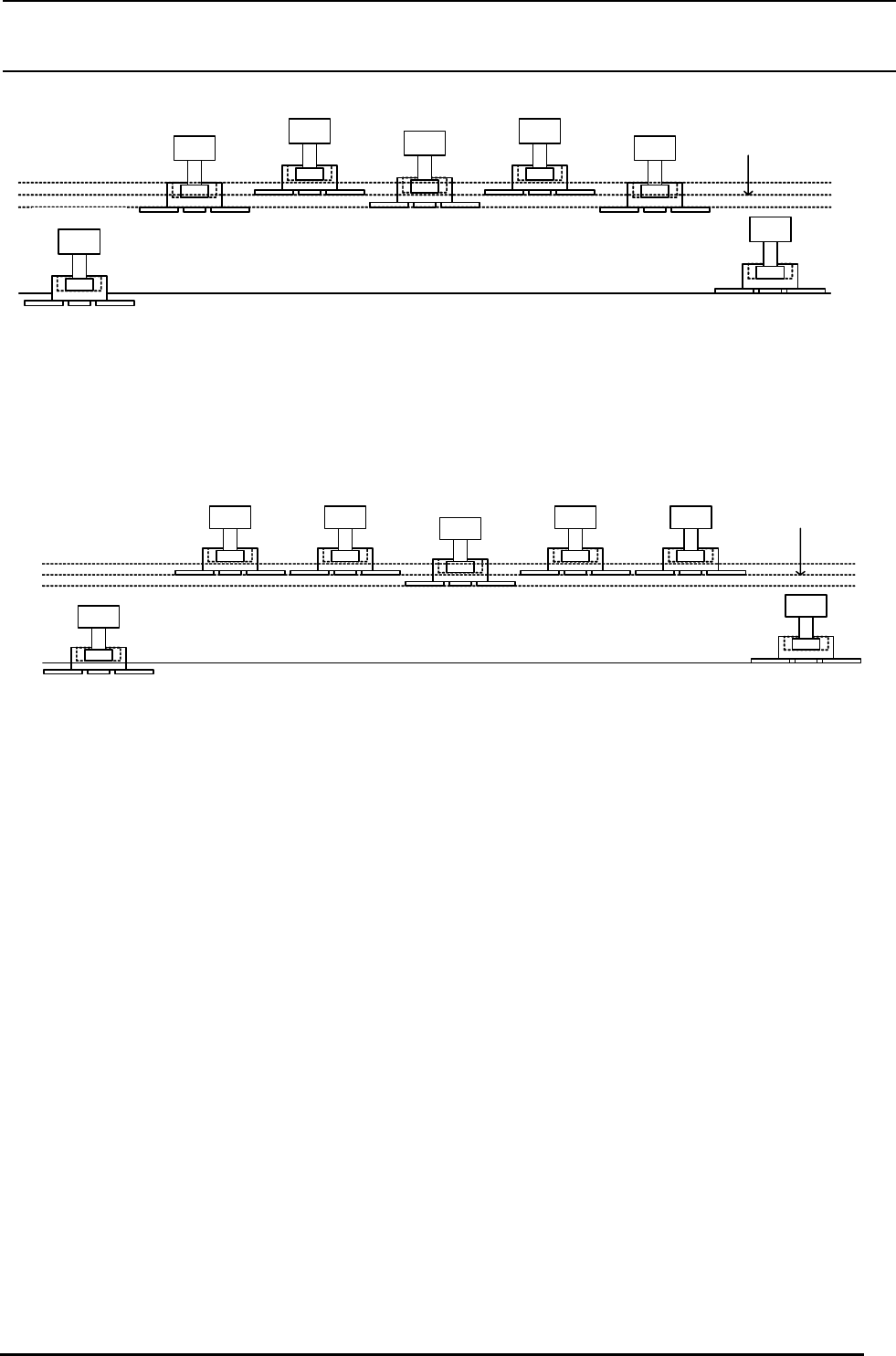
吸附 吸附 吸附
识别
贴装 贴装 贴装
吸附高度
转动高度
XY可以移动高度 VCS识别高度
XY可能移动高度 转动高度 贴装高度
元件可能移动高度
基板上面高度
传感器下面高度
图像焦点高度
图3−11−6 大型元件的吸附、识别、贴装面的高度控制变化
吸着高さ
吸着
回転高さ
吸着
XY移動可能高さ
吸着
VCS認識高さ
認識
XY移動可能高さ
搭載
回転高さ
搭載
搭載高さ
搭載
基板上面高さ
センサ下面高さ
部品移動可能高さ
画像焦点高さ
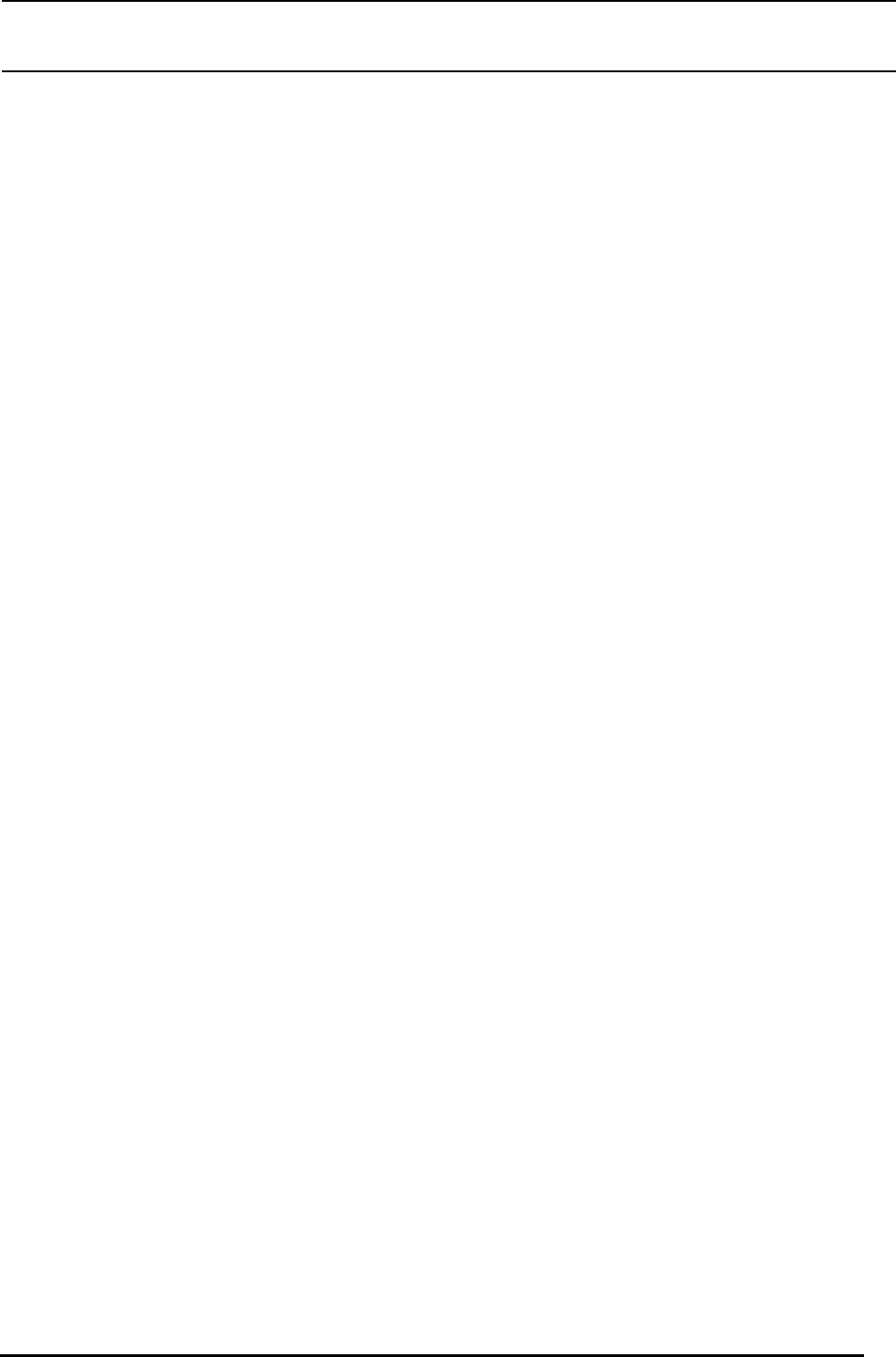
吸附
吸附 吸附
识别
贴装 贴装
贴装
元件可能移动高度
吸附高度 转动高度 XY可能移动高度 VCS识别高度 XY可能移动高度 转动高度 贴装高度
传感器下面高度
基板上面高度
图3−11−7 中小型元件的吸附、识别、贴装面的高度控制变化
Rev1.00c
动作说明书
3-
60
3-11-7 大型视觉元件和已贴装元件的元件高度限制
大型视觉识别元件(实效元件对角线尺寸超过 88.00mm 的视觉识别元件,贴装了比以前元件高度高的元
件之后,有可能与已贴装的元件相碰,经指定位置等贴装了大型视觉识别元件后,请指定比元件高度高
的元件贴装。另外,大型视觉识别元件的贴装坐标互相干涉的位置,有可能不能贴装元件。
把元件高度 T、元件深度 D 的合计值(T+D)称为实效元件高度 TD。
大型视觉识别元件贴装前,已经被贴装的元件的最大实效元件高度称为 TD Max。
大型视觉识别元件的最大实效元件高度称为 TDV Max。
如前述所示,大型元件转动高度(RZ)可以用下式表示。
RZ = SZ + 4.00mm - D - T (RZ 为元件最下面的高度)
RZ = SZ + 4.00mm - TD
因为 XY 移动高度是元件规格基板的最大翘曲量(2.00mm)和退避高度(1.00mm)合计了的高度,如果适用同
样的考虑方法的话,大型元件转动高度(RZ)在 TD Max+3.00mm 的高度以上则可以。
RZ >= TD Max + 3.00mm
SZ + 4.00mm - TDV Max >= TD Max + 3.00mm
SZ ‒ TDV Max >= TD Max - 1.00mm
SZ - TD Max + 1.00mm >= TDV Max
12mm 高度规格机,TDV Max<=(16.00-TD Max)。
20mm 高度规格机,TDV Max<=(24.00-TD Max)。
把 TDV Max 最为最大元件高度的话,TD Max 为 4.00mm。
实效元件高度 4.01mm 以上的元件,经位置指定等铁桩了大型视觉识别元件后,请指定元件贴装。
激光定心元件元件没有元件深度(D)的定义。
只用元件高度(T)决定贴装顺序是不够的。请考虑元件深度(D)。
Rev1.00c
动作说明书
3-
61
3-11-8 实效元件外形尺寸
所谓元件数据的元件卫星尺寸,是另外定义实效元件外形尺寸。
实效元件外形尺寸指实效元件外形尺寸转动元件后看到的外形尺寸。
这是考虑了识别偏差(吸附位置和元件外形中心位置的偏差)后的值。
贴片机的生产部,通过元件外形尺寸、吸附样子、贴装角度、分割数、识别偏差、照明种类的条件组合、
动态地改变吸附、贴装时的识别样子控制。
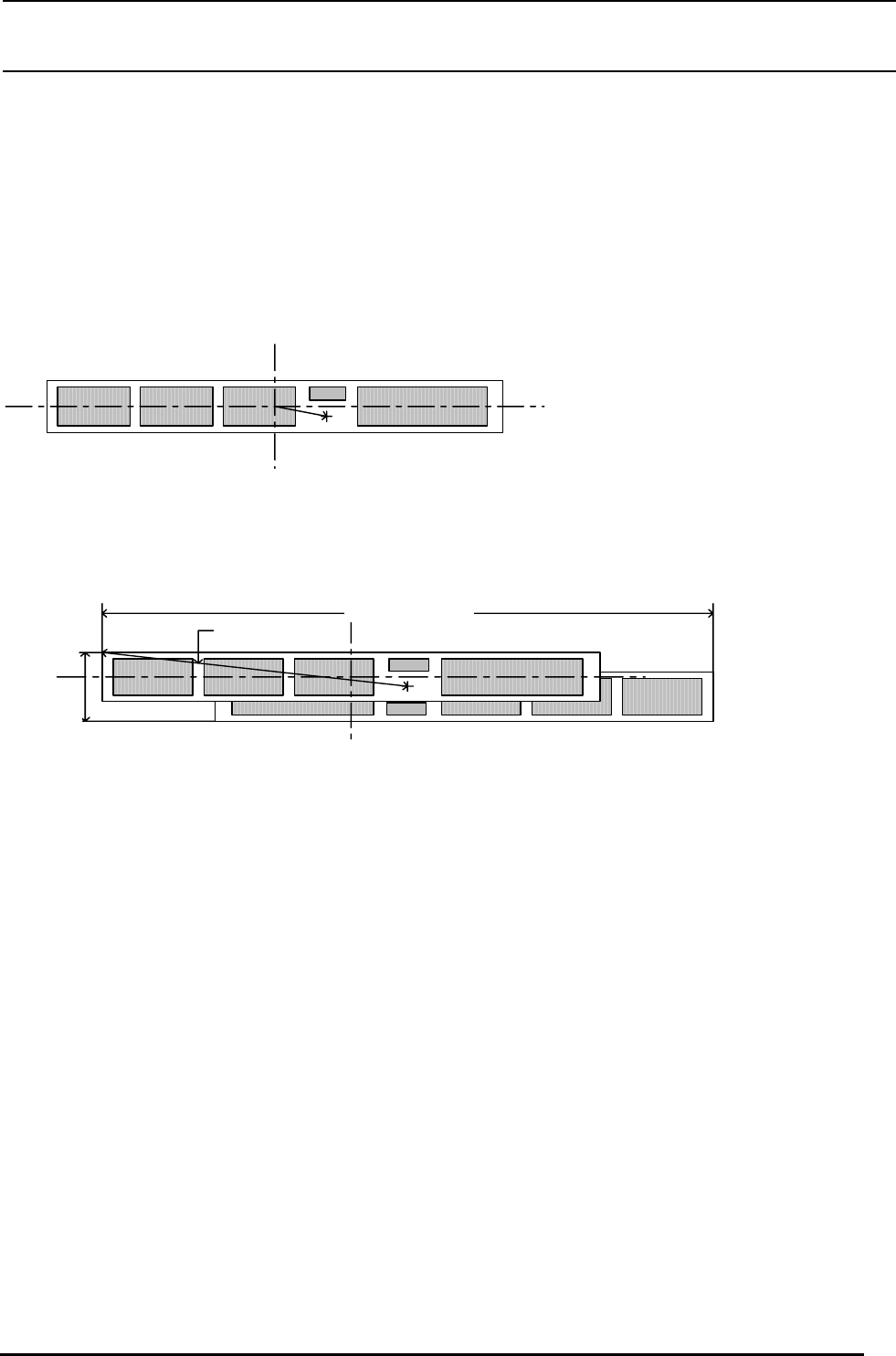
下图表示空孔的外形识别元件的各部尺寸。
部品外形中心と認識(吸着)オフセット
图3−11−8
姿勢0°
姿勢180°
部品姿勢と実効部品対角寸法、実効部品長辺寸法、実効部品短辺寸法
実効部品
短辺寸法
実効部品長辺寸法
実効部品対角寸法
图3−11−9
实效元件
短边尺寸
样子
实效元件对角尺寸
元件样子和
实
效元件对角尺寸,
实
效元件长边尺寸,
实
效元件短边尺寸
元件外形中心和识别(吸附)偏差
样子
实效元件长边尺寸