KE-2070_2080 動作説明書.pdf - 第9页
R e v 1 . 00c 动作说明书 2- 3 2-2-2 性能 用于 X 轴驱动的电动机及磁性标尺的性能如下表所示。 项目 规格 备注 电动机 额定输出 750[W] 额定转速 3000[r/min] 最大转速 6000[r/min] 编码器分辨率 262144[pulse/rev] 编码器输出 三菱串行 分辨率 1[μm] 磁性标尺 传感器输出 A、B、Z 相 通过伺服放大器参数的传动比设定, 指令 1 脉冲的移动量 被设定为 1…
Rev1.00c
动作说明书
2-
2
2-1-3 故障检测(外部编码器的断线检测)
① 以伺服放大器进行通信故障检测,当电缆线脱落时发出 ALM70,伺服断开。
② 以伺服放大器进行通信故障检测,因断线等导致通信故障发出 ALM71,伺服断开。
③ 当电机编码器和外部编码器(磁尺)的差为电机编码器的约 1/4 转以下时,伺服放大器侧即形成
ALM42 报警,伺服断开。
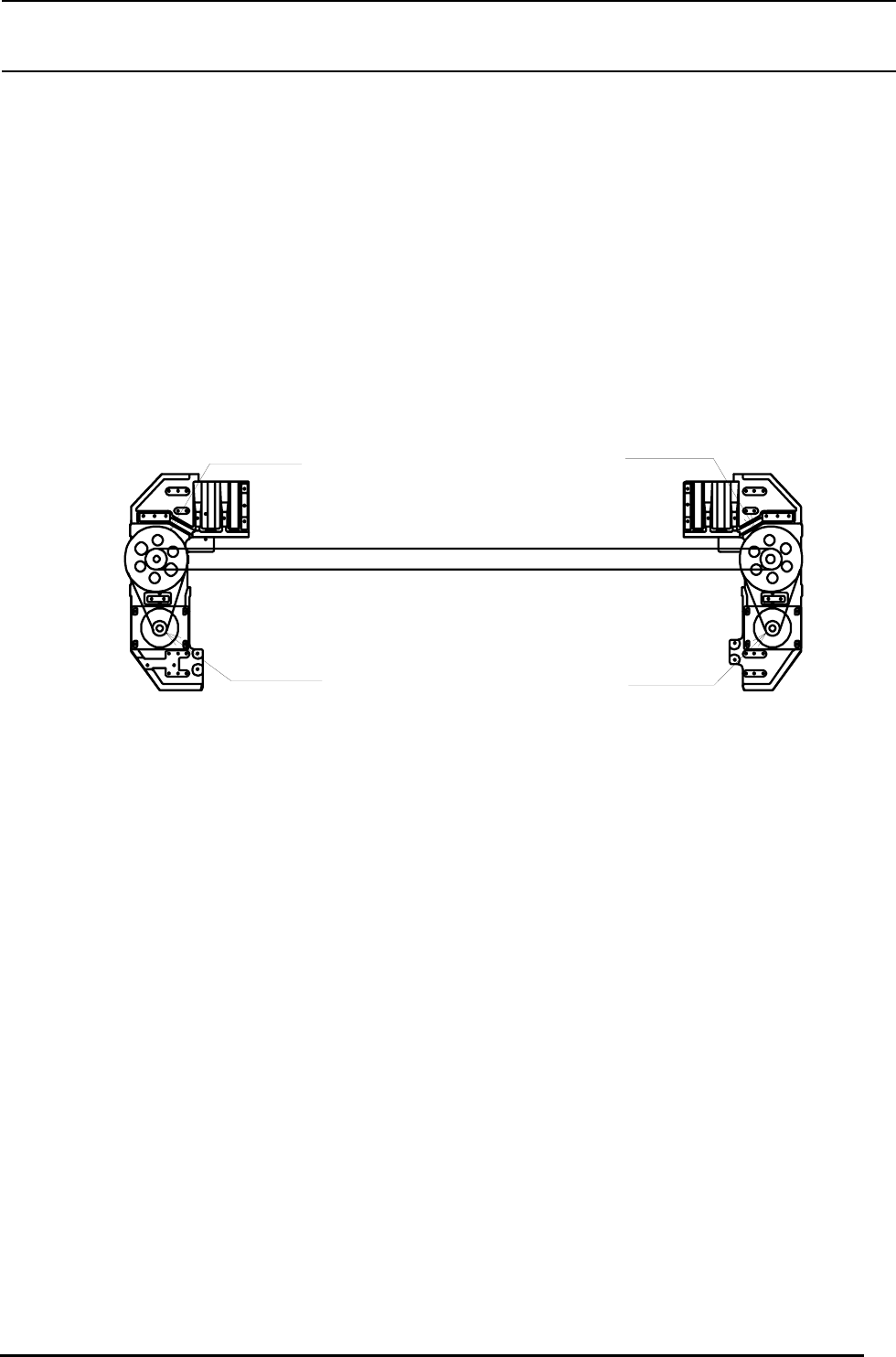
2-2 X 轴
本轴是进行元件贴装头向 X 轴方向(从装置正面看是从右向左、从左向右驱动)驱动的轴。
驱动用的电动机安装在左右两侧,以串联驱动方式工作,位置控制应用磁性标尺,以全闭环控制方式工作。
2-2-1 组成
・皮带轮 XM 和皮带轮 XA 的减速比 30:120
・皮带轮 XA 的的间距圆直径的比 30.42 mm:114.59 mm
・平均马达 1 圈的移动量为 26.25 mm(30/120×33.42 mm×π)
皮带轮XA
皮带轮XA
皮带轮XM 皮带轮XM
马达输出 750W 图2-2
Rev1.00c
动作说明书
2-
3
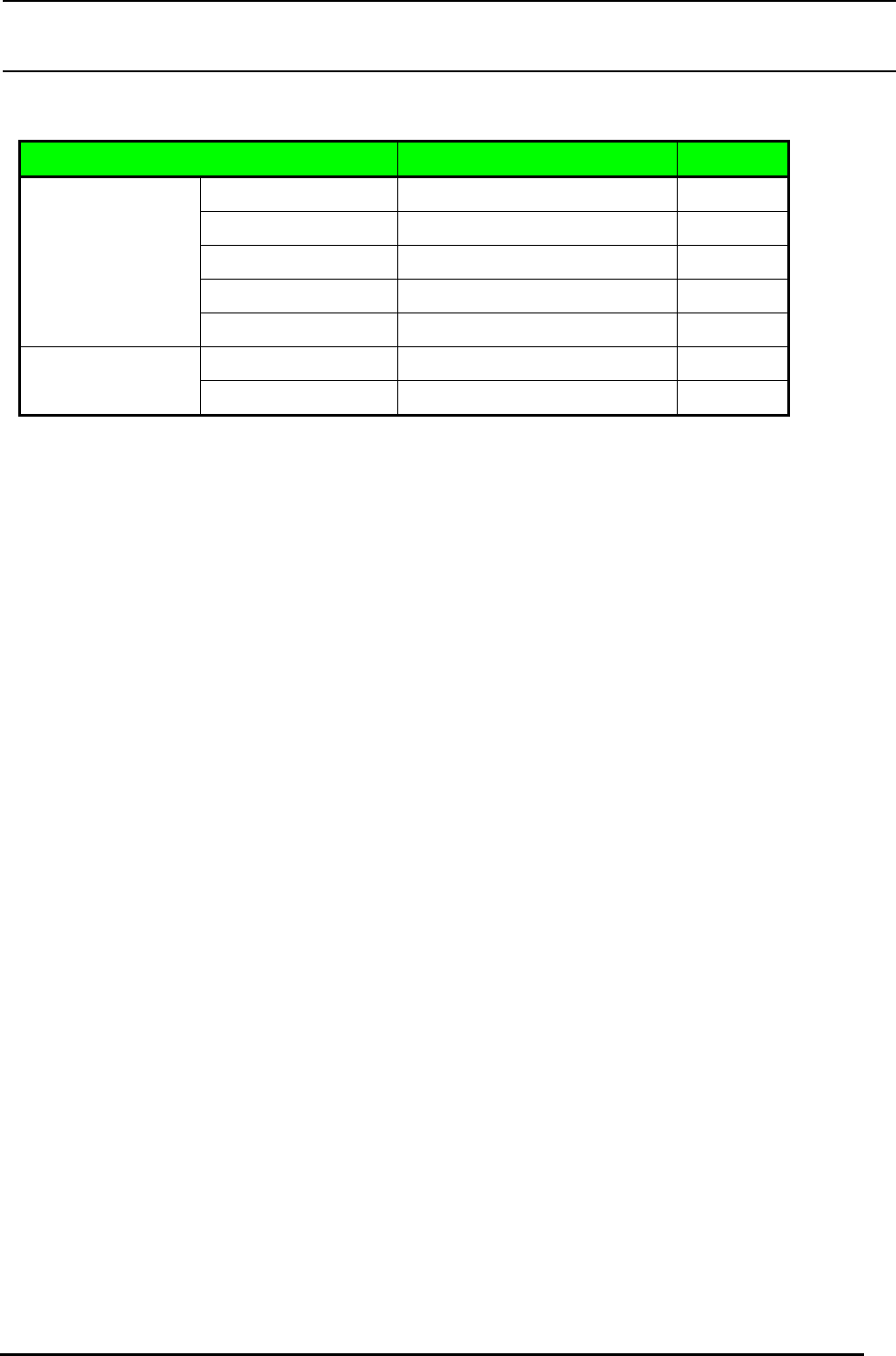
2-2-2 性能
用于 X 轴驱动的电动机及磁性标尺的性能如下表所示。
项目 规格 备注
电动机 额定输出 750[W]
额定转速 3000[r/min]
最大转速 6000[r/min]
编码器分辨率 262144[pulse/rev]
编码器输出 三菱串行
分辨率 1[μm] 磁性标尺
传感器输出 A、B、Z 相
通过伺服放大器参数的传动比设定, 指令 1 脉冲的移动量
被设定为 1μm。(传动比:26250/262144)
2-2-3 故障检测(外部编码器的断线检测)
① 以伺服放大器进行通信故障检测,当电缆线脱落时发出 ALM70,伺服断开。
② 以伺服放大器进行通信故障检测,因断线等导致通信故障发出 ALM71,伺服断开。
③ 当电机编码器和外部编码器(磁尺)的差为电机编码器的约 1/4 转以下时,伺服放大器侧即形成
ALM42 报警,伺服断开。
2-3 贴装元件用的贴装头轴(Z,θ 轴)
贴装元件用的贴装头轴,由利用激光识别贴装元件的 LNC60 轴(共 6 轴)和利用 VCS 图像识别 IC 元
件的 IC 轴(共 1 轴∗1)组成。
Z 轴是向吸取元件或贴片时的动作方向,也即向上下方向(从贴装头正面看是从上向下、从下向上驱动)
进行驱动的轴。
θ 轴是向元件识别或贴片角度控制时的动作方向,也即向旋转方向(从贴装头正面看是向右转、向左转
的旋转驱动)进行旋转驱动的轴。Zθ 轴均以半闭环控制驱动。
∗1:IC 轴仅配备于 KE-2080 型。
Rev1.00c
动作说明书
2-
4
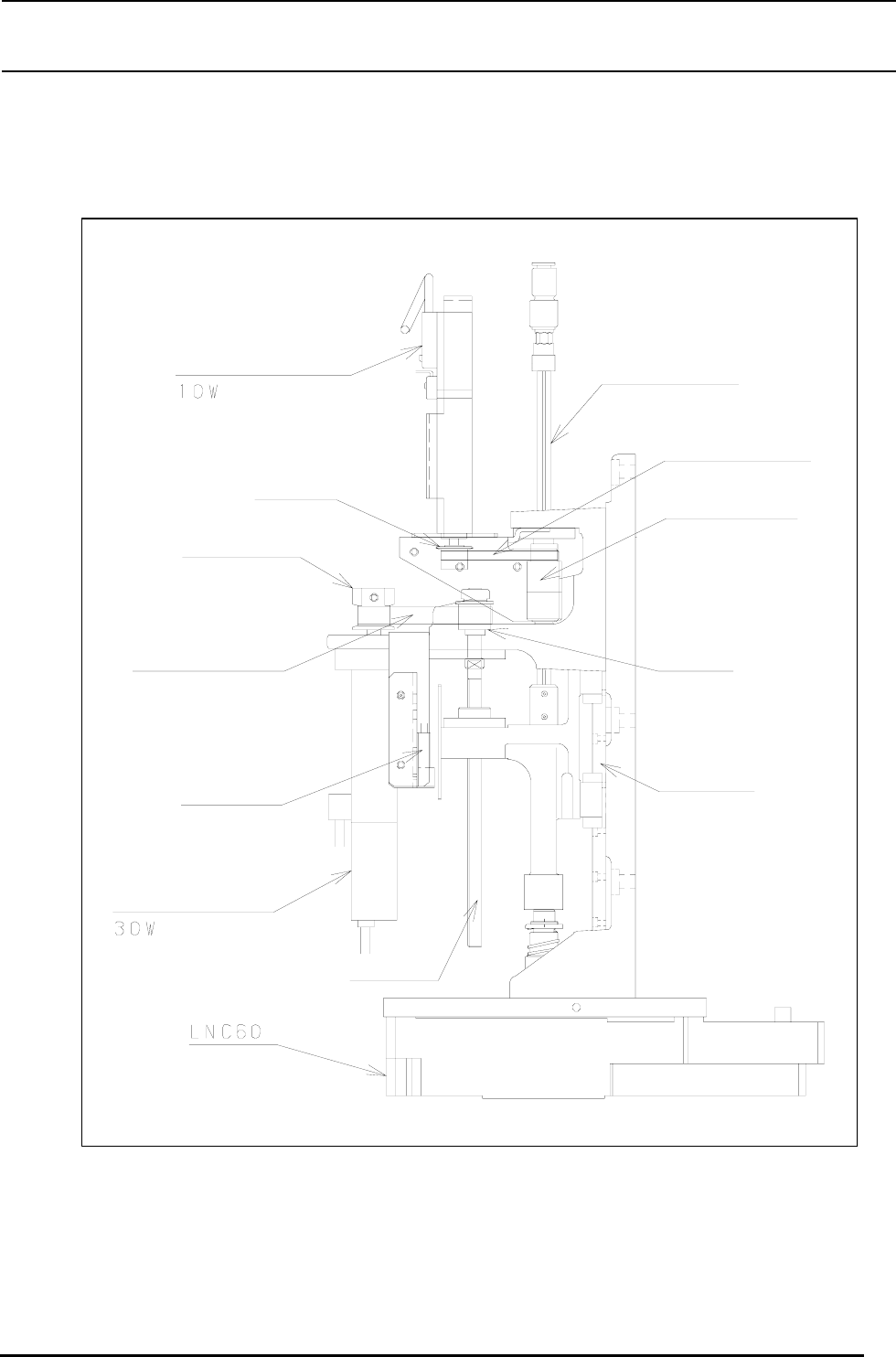
2-3-1 LNC60 轴
是利用激光识别贴装元件的轴,共由 6 轴组成。
2-3-1-1 组成
LNC60 轴的组成如下所示。
・Z 轴减速比 1.0
・θ 轴减速比 1.0
θ 电动机
T 皮带轮
25 齿
Z 电动机皮带轮
30 齿
同步皮带 Z
1.5GT-90 齿
Z 原点传感器
Z 电动机
滚珠花键
滚珠螺杆
同步皮带 T
1.5GT-76 齿
花键皮带轮
25 齿
Z 皮带轮
30 齿
直线导轨