KE-2070_2080 動作説明書.pdf - 第53页
R e v 1 . 00c 动作说明书 3- 40 3-8 激光识别动作 (1)SWEEP 测定时的参数设定 使用 SWEEP 指令时,需要预先指定决定以下的测定动作的参数。 ① 闭锁角 (Holdoff Angle) 要指定的是:发出 SWEEP 开始指令之后 θ 旋转达到一定速度所需的旋转角度。 计测旋转必须以一定速度进行。 LNC60 会监视贴片机的 θ 轴编码器信号,当 θ 达到设定的角度 时开始取得数据。 ② 吸附角度 (dR…
Rev1.00c
动作说明书
3-
39
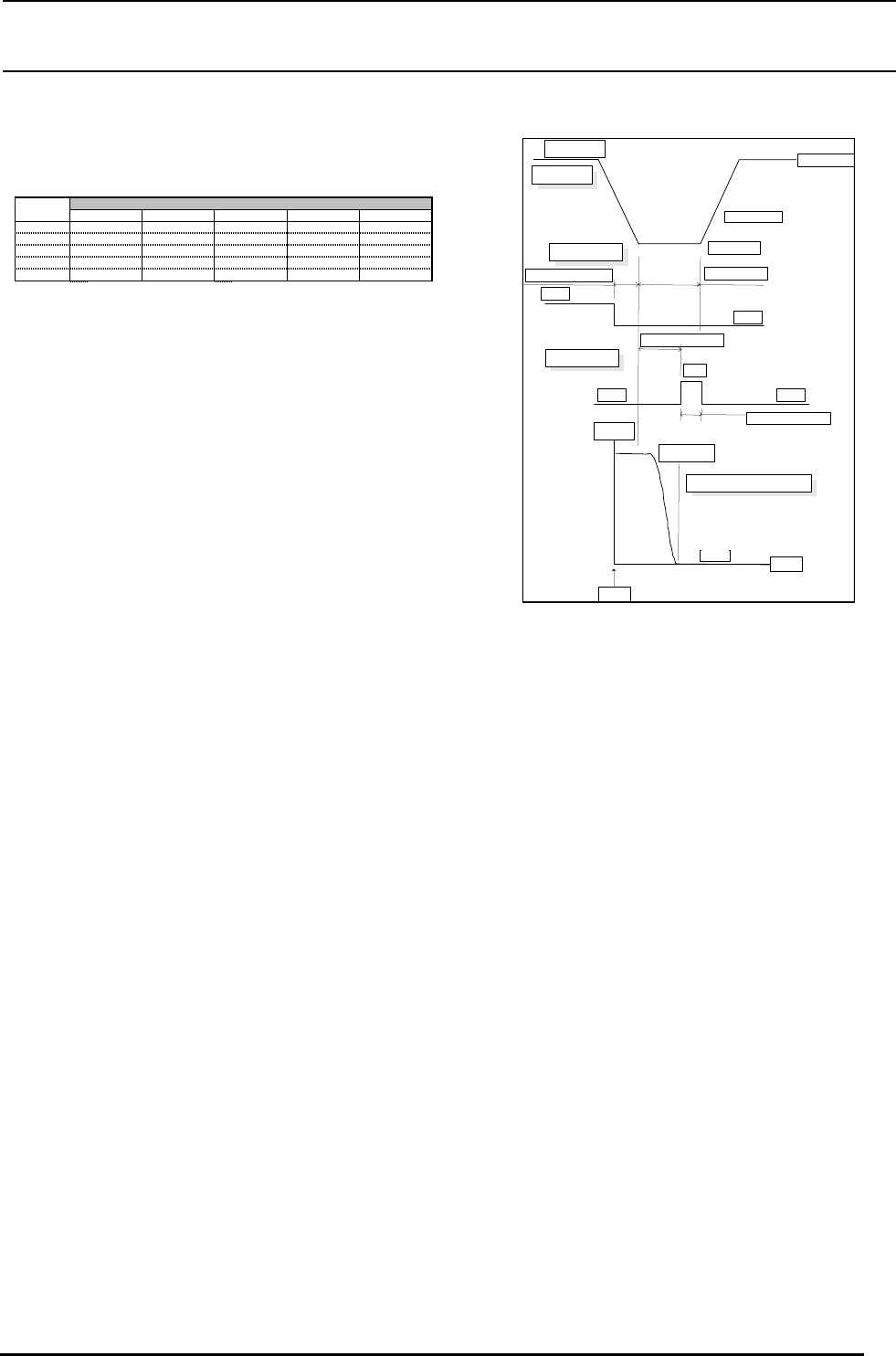
3-7-5 向废弃箱废弃元件时的真空同步时间 <1>
采用现行的废弃箱时,由于废弃时的鼓风,已发现元件高速落下、在箱底反弹向外飞出的现象。尝试过
通过改良废弃箱的形状来解决,但未得到充分改善,这就需要同时采取改变真空同步时间的对策,因而
必须对废弃箱和其他废弃动作(托盘返回、IC回收带)的同步时间进行区别控制。
向废弃箱废弃时的机械控制参数的Default值
(注) nTrashBoxVacOff、nTrashBoxVacCorr、nTrashBoxBlowOn、nTrashBoxBlowTime、nTrashBoxHold可以变更保
存到机械控制参数。
〔废弃真空控制的机械控制参数〕
W.TrashBox.Vac.Off:废弃Z轴下降完了反转Vac至电磁阀Off的时间。
nTrashBox.Vac.Off:废弃Z轴下降完了反转Vac至电磁阀Off的时间。(校正前)
nTrashBoxVacCorr:Vac电磁阀断开(Off)时机的校正值。
nTrashBoxBlowOn:废弃Z轴下降完了反转上升Blow至电磁阀On的时间。
nTrashBoxBlowTime:Blow电磁阀On时间。
nTrashBoxHold:废弃Z轴下降的时间是Vac的残压切断的等待时间。
元件尺寸越大,定时器指需要越长。
W.Trash.Vac.Off的计算式
W.Trash.Vac.Off = nTrashBoxVacOff+nTrashBoxVacCorr MS参数的真空载荷未输入值。
W.Trash.Vac.Of f= −wTime6+nTrashBoxHold+nTrashBoxVac MS参数的真空载荷已输入值。
(注) W.TrashBox.Vac.Off为负值时,Z轴下降完了之后同时真空电磁阀Off。
正值时,吸附下降完了之后,反转真空电磁阀Off。
(例) MS参数的真空载荷为输入值
系数3时,w.TrashBox.Vac.Off = nTrashBoxVacOff + nTrashBoxVacCorr
= 50+0
= 50
废弃下降完了之后,反转真空电磁阀Off。
(例) MS参数的真空载荷已输入值
元件种类为系数0,wTime6 = 27时,w.TrashBox.Vac.Off = wTime6 + nTrashBoxHold + nTrashBoxVacCorr
= 27−136+0
= −109
废弃下降结束后等待109ms,断开真空电磁阀。
各词语的意义如下。
「机械控制参数」「其他」「真空」「元件种类真空同步时间」「元件废弃(废弃箱)」
nTrashVacOff :「真空停止同步时间」
nTrashVacCorr :「真空停止修正值」
nTrashBlowOn :「吹风开始时间」
nTrashVacCorr :「吹风持续时间」
nTrashHold :「真空切断等待时间」
上述在废弃时的机械控制参数 Default 值的表中有各指标值。
「自我校准」「真空校准」「生产使用值」「V.CAL」
wTime6 :「真空破坏时间」
有各贴装头的值。
入
力
力
済
nTrashBoxBlowOn
VAC 電磁弁
ON
ノズル内真空圧の変化
W.TrashBox.Vac.Off
OFF
Z軸上昇位置
Z軸上昇位置
Z軸下降位置
Z軸
nTrashBoxHold
Blow 電磁弁
nTrashBoxBlowTime
ON
OFFOFF
時間
真空圧
真空到達圧
大気圧
VavOff
DEFAULT値
インデックス
nTrashBoxVacOff nTrashBoxVacCorr nTrashBoxBlowOn nTrashBoxBlowTime
nTrashBoxHold
0 50 0 -126 10 136
1 50 0 -126 10 136
2 50 0 -126 10 136
3 50 0 -126 15 141
4 50 0 -126 15 141
系数
Z 轴下降位置
Z 轴下降位置
Z 轴上升位置
Z 轴上升位置
Z轴
VAC 电磁阀
Blow 电磁阀
大气压
真空压
真空到达压
吸嘴内真空压的变化
时间
Rev1.00c
动作说明书
3-
40
3-8 激光识别动作
(1)SWEEP 测定时的参数设定
使用 SWEEP 指令时,需要预先指定决定以下的测定动作的参数。
①闭锁角(Holdoff Angle)
要指定的是:发出 SWEEP 开始指令之后 θ 旋转达到一定速度所需的旋转角度。
计测旋转必须以一定速度进行。LNC60 会监视贴片机的 θ 轴编码器信号,当 θ 达到设定的角度
时开始取得数据。
②吸附角度(dRz Nominal)
对元件被吸附的角度(-180°≦dRz Nominal<180°)进行指定。在贴片机的贴装动作中,是使贴
装头的 θ 轴转到吸附角度再吸取元件的,所以该值始终指定为 0。
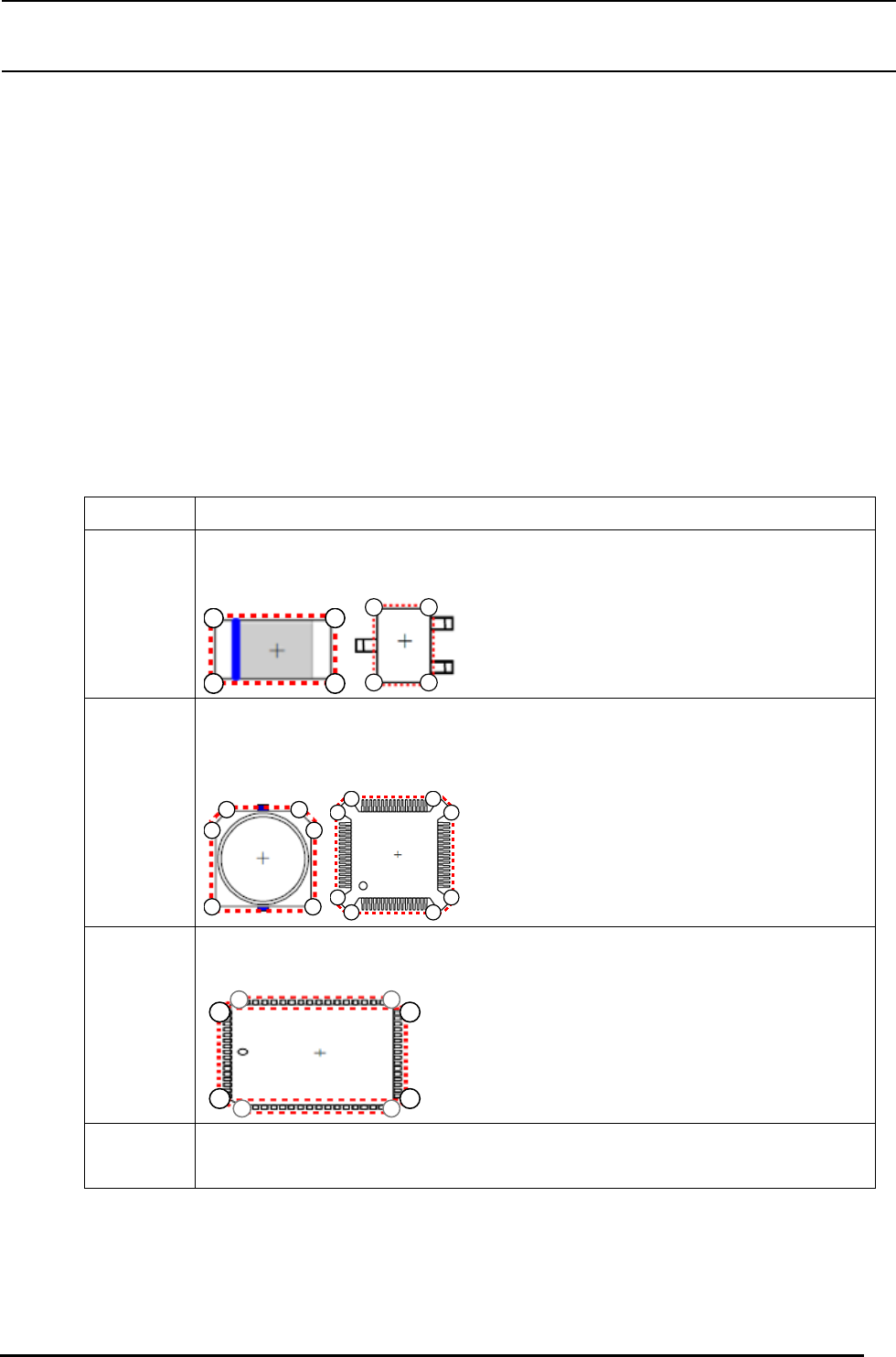
③元件形状(Shape Template)
对根据收集到的数据计算位置偏移、角度偏移、元件尺寸的方法(算法)进行指定。
现在所使用的元件形状
元件形状 动 作
无切角 根据测定数据检测出 4 个顶点,计算位置偏移、角度偏移、尺寸。
无切角、接近矩形形状的元件指定这种元件形状。
2
3 4
1
2 1
3 4
有切角 根据测定数据检测出 5~8 个顶点,计算位置偏移、角度偏移、尺寸。
即便是有 1 个切角的元件,或者是激光测定位置上有引脚的元件,指定这种元
件形状。
1
2 3
4
6 5
1
2 3
4
5
6 7
8
PLCC 根据测定数据检测出 8 个顶点,利用其中 4 点计算位置偏移、角度偏移、尺寸。
是 PLCC 专用的元件形状。
2
1
3
4
8
7 6
5
圆筒 根据测定数据计算位置偏移、尺寸。角度偏移不计算。

Rev1.00c
动作说明书
3-
41
④ 窗口尺寸(Sweep Radius)
以距吸嘴旋转中心的大小来指定检测元件的窗口尺寸。
LNC60 根据所测定的元件尺寸来改变窗口尺寸。
测定对角线长 15mm 以下的元件时,指定为 7.5mm。由于实际上存在着元件的吸附位置偏移,所
以加上几毫米的余量。
向 LNC60 发送 SWEEP 参数设定指令,即可设定各参数。