KE-2070_2080 動作説明書.pdf - 第86页
R e v 1 . 00c 动作说明书 3- 73 3-13 坏标记检测 3-13-1 坏标记检测 坏标记检测按照以下得顺序进行。 ① 把 X−Y 轴移动到坏标记检测坐标。此时,开始移动之后,同时坏标记传感器的 LED 亮灯。 ② X−Y 轴检测结束之后, 读取坏标记传感器的状态, 实行电路或记录跳过之后, 坏标记传感器的 LED 灭灯。 ③ 从电路号码 1 到最后电路反复 ①∼② 。 另外, 检测坏标记的电路顺序, 与各电路的 BOC…
Rev1.00c
动作说明书
3-
72
3-12-4-3 照明图案
亮灯照明 对象基板
垂直 + 角度 硬基板
角度 挠性基板
3-12-4-4 电流调整值
标准值 偏差值
调整范围
(标准值+偏差值)
照明种类
最大值
TAP
(调整量)
最大值
TAP
(调整量)
最小值 最大值
垂直照明 90 0.35 30 0.12 0 120
角度照明 345 1.35 115 0.45 0 460
Rev1.00c
动作说明书
3-
73
3-13 坏标记检测
3-13-1 坏标记检测
坏标记检测按照以下得顺序进行。
① 把X−Y轴移动到坏标记检测坐标。此时,开始移动之后,同时坏标记传感器的 LED 亮灯。
② X−Y轴检测结束之后,读取坏标记传感器的状态,实行电路或记录跳过之后,坏标记传感器的 LED
灭灯。
③ 从电路号码 1 到最后电路反复①∼②。
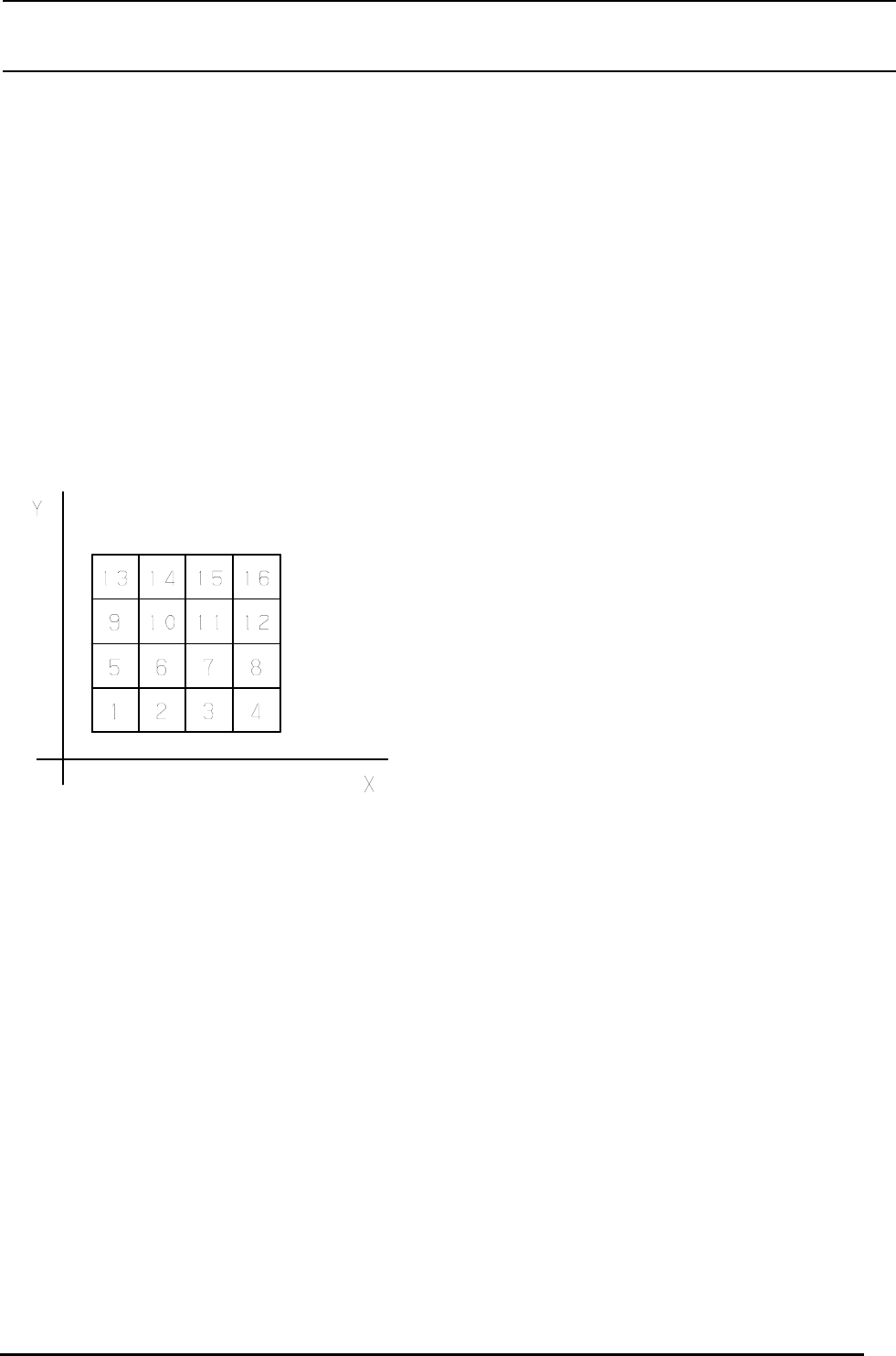
另外,检测坏标记的电路顺序,与各电路的BOC标记相同,非矩阵基板的电路号码,用基板输入电路
输入位置的号码为顺序,矩阵基板的电路号码,为 X 轴的机械园地按电路 X 坐标的增加方向向 Y 轴元点
坐标增加的方向反复进行。(参照下图)
图3−13−1
Rev1.00c
动作说明书
3-
74
3-14 共面测定
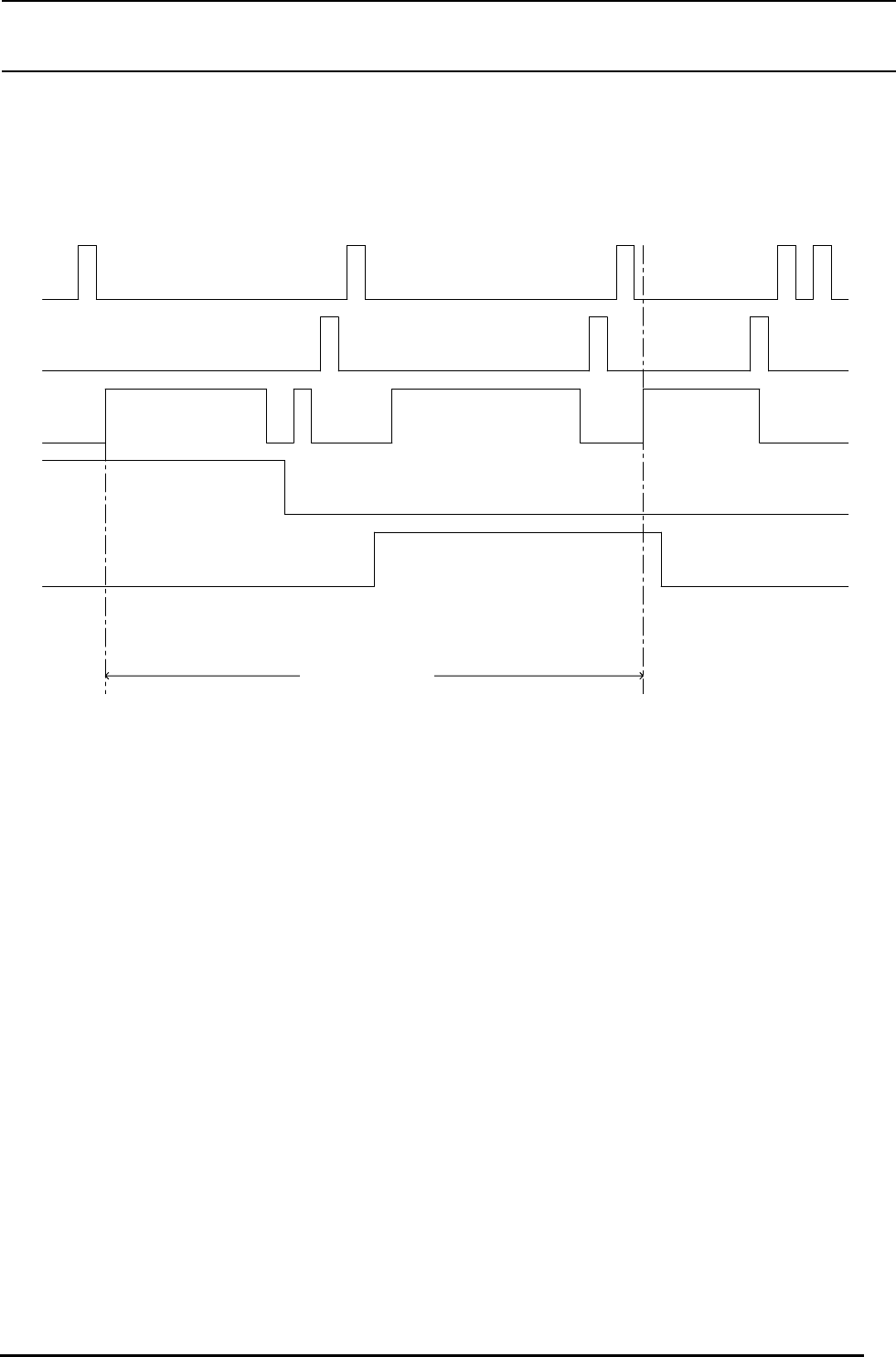
3-14-1 共面测定方法
KE2080 型中,共面测定方法有改变。
以下,表示 KE206 的共面测定时的时间曲线。
② ④
⑤①
⑥
⑧
③
⑦
⑩
⑪
θ
XY
Vision
Copla
コプラナリティ拘束時間
⑨ ⑫
⑬ ⑭
Z
图
3−14−1.共面测定的时间曲线表(一次测定时)
①移动图像扫描后的元件可以移动的高度
②移动 XY 到共面装置
③等待图像识别结束
④XY 修正动作
⑤移动共面测定高度
⑥θ修正
⑦计算共面测定+测定结果(扫描动作时间+测定计算待机)
⑧扫描
⑨移动样子控制(贴装样子和测定样子相同时,动作被跳过)
⑩移动元件可能移动高度
⑪移动 XY 贴装位置
⑫控制元件贴装样子(θ修正)
⑬下降元件贴装
⑭元件贴装后上升
共面约定时间