KE-2070_2080 動作説明書.pdf - 第17页
R e v 1 . 00c 动作说明书 3- 4 3-2 基板传送 1. IN 马达 ( 步进马达 ) 2. CENTER 马达 ( 步进马达 ) 3. OUT 马达 ( 步进马达 ) 4. IN 传感器 5. WAIT 传感器 6. STOP 传感器 7. C・OUT 传感器 8. OUT 传感器 9. 止动器 10.X 推进器 11. Y 推进器 12. 支撑台电动机(步进电动机) 13. 支撑台原点传感器 A 1 1 3 3 2 …
Rev1.00c
动作说明书
3-
3
<各轴原点复归前的预备动作>
轴 预备动作的内容
X,Y 如果在近点限位开关上,则以 jog 方式向离开近点限位开关的方向移动,
在近点限位开关变为 OFF 处停止 jog。
Z 进行的预备动作是,使原点复归的开始高度与距近点限位开关边缘约 6mm
的位置对齐。
θ
当无条件地进行原点复归动作时,如果 Z 相与原点复归开始位置离开过多,
则以爬行速度寻找 Z 相需要非常长的时间。进行的预备动作是,为了缩短
这一时间而以高速寻找 Z 相,使原点复归开始点位于 Z 相附近。
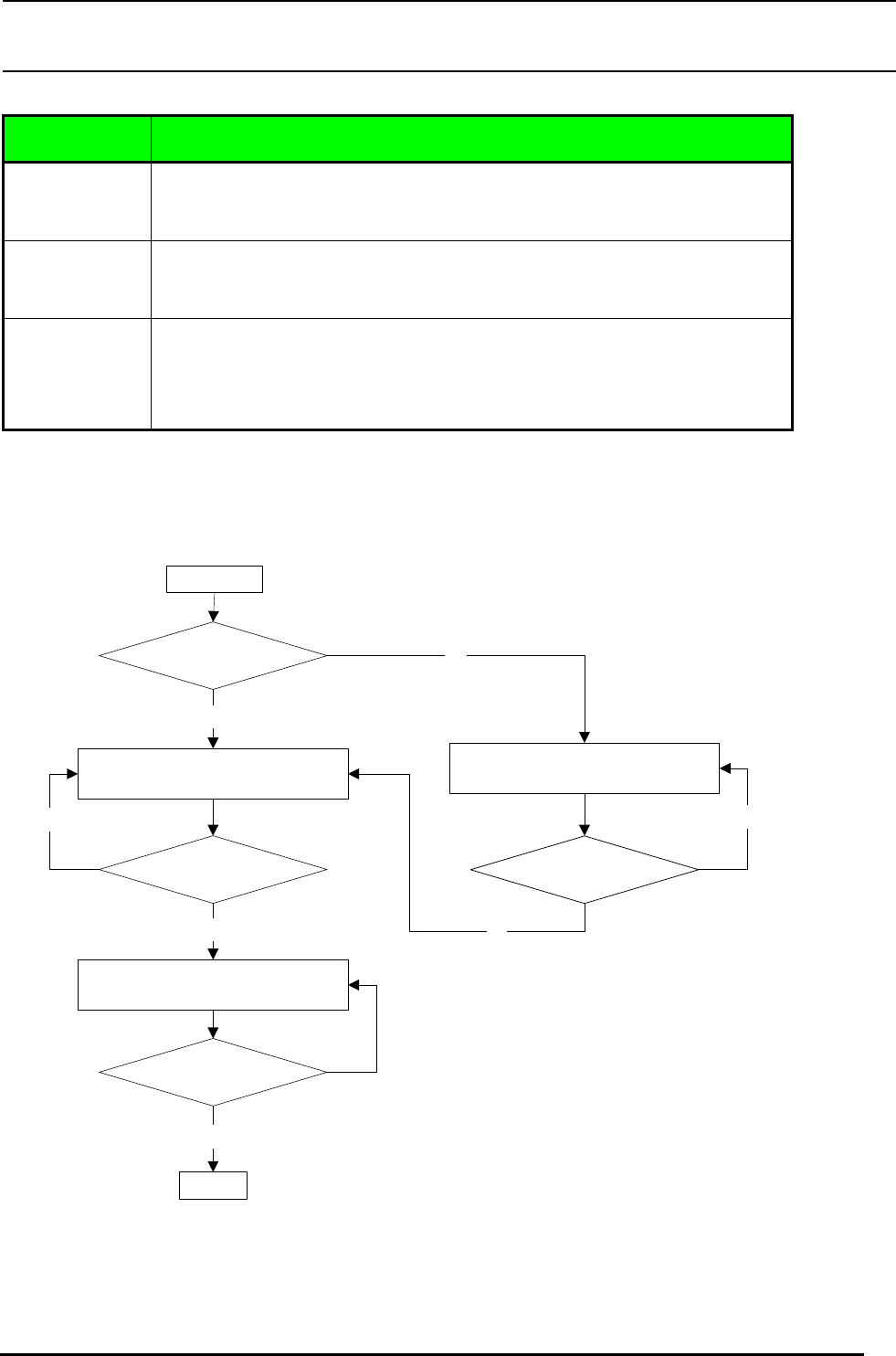
3-1-2 支撑台原点复归动作
支撑台原点复归的过程如下所示。
向机台上方凸凹移动
(传感器Off方向)
向机台下方向Step移动
(传感器On方向)
on
START
原点传感器
原点传感器ON
检测零相
END
off
on
on
off
殊霞
向机台下方向凸凹移动
(传感器On方向)
原点传感器ON
off
检测
Rev1.00c
动作说明书
3-
4
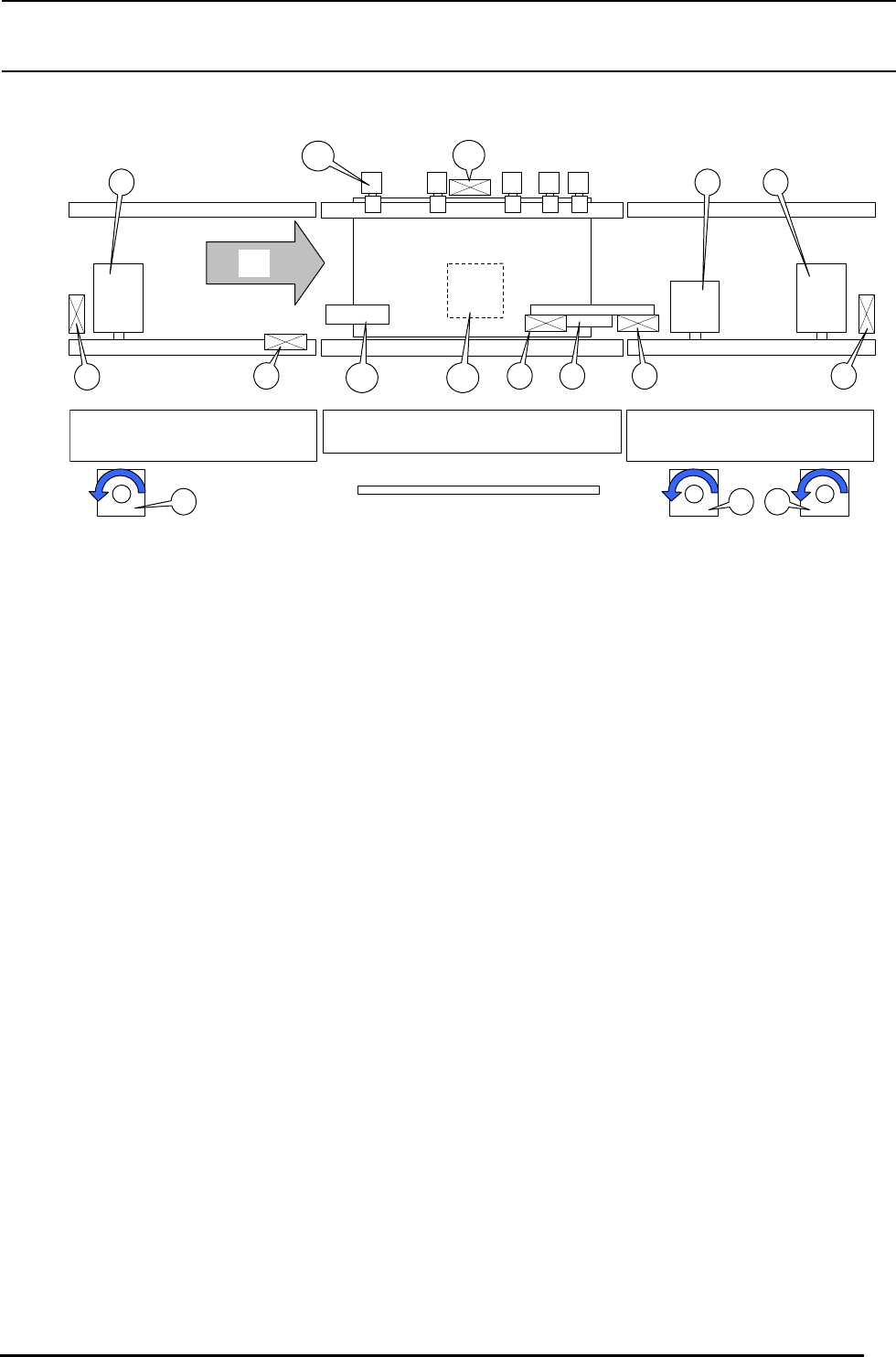
3-2 基板传送
1. IN马达(步进马达)
2. CENTER马达(步进马达)
3. OUT马达(步进马达)
4. IN传感器
5. WAIT传感器
6. STOP传感器
7. C・OUT传感器
8. OUT传感器
9. 止动器
10.X推进器
11. Y推进器
12. 支撑台电动机(步进电动机)
13. 支撑台原点传感器
A
1
1
3
32
2
4
5 6 9 7 8
10
11
13
12
Rev1.00c
动作说明书
3-
5
异常种类 内容
IN缓冲异常 1) IN马达ON后,IN传感器 3 秒以上ON。
2)IN 马达转动时,IN 传感器和 WAIT 传感器同时变为 ON。
3) IN 传感器 ON,从 IN 马达开始转动起 6 秒钟之后,WAIT 传感器也不 ON。
(有关时间,由机械控制参数决定)
4) 从 IN 缓冲向入口侧中心站过度经 6 秒之后也不结束。
(有关时间,由机械控制参数决定)
入口侧中心站异常 1) 入口侧中心马达连续转动 6 秒钟以上。
2) 入口侧 C・OUT 传感器 ON,入口侧 STOP 传感器 OFF->ON。
3) 从入口侧中心站向出口侧中心站过度经 6 秒之后也不结束。
(有关时间,由机械控制参数决定)
OUT缓冲异常 1) OUT 马达连续 6 秒钟以上连续转动。
2) 出口侧 C・OUT 传感器和 OUT 传感器通知变为 ON。
3) 从 ReadyIN(ON)信号检测向后续工程过度经 6 秒之后也不结束。
(有关时间,由机械控制参数决定)
支撑台错误 1) 在支撑台电动机上升结束时 T·PIN 传感器启动(以孔为基准时)。
其他 1) 步进电动机错误
2) 支撑台电动机动作故障
3-2-1 传送电动机
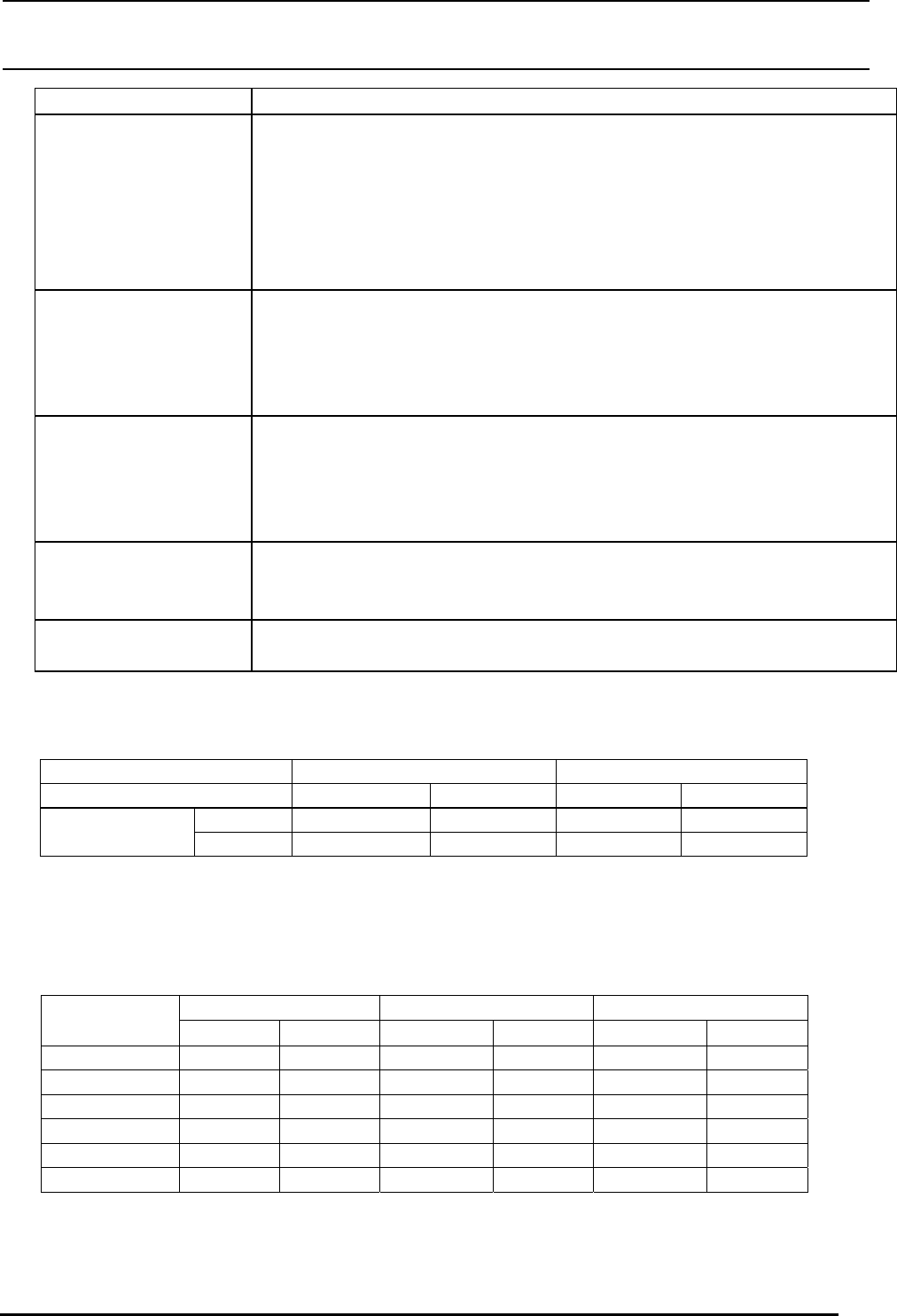
如下表所示,电动机的旋转方向根据机器规格而不同。
传送方向 左→右 右→左
基准 身前 里侧 身前 里侧
正转 CCW CW CW CCW 电动机旋转方向
反转 CW CCW CCW CW
速度控制方式是三角形驱动(梯形驱动)。
速度档次有高速·中速·低速 3 级以及基板夹紧·重新夹紧时使用的预备进给 1·预备进给 2。并且,通过参
数设定,高速可以切换到 400mm/s 或 300mm/s。
252μm/脉冲,各速度分类值如下表所示。
最高速度 最高加速度 最高减速度
(mm/s) (pps) (mm/s
2
) (pps
2
)
( mm/s
2
)
(pps
2
)
高速 400 1,587 1008.0 4,000 1008.0 4,000
高速 300 1,190 1008.0 4,000 1008.0 4,000
中速 230 913 1008.0 4,000 1008.0 4,000
低速 130 515 1008.0 4,000 1008.0 4,000
预备进给1 56 222 1008.0 4,000 1008.0 4,000
预备进给2 14 55 1008.0 4,000 1008.0 4,000