KE-750_MAINTE.pdf - 第100页
3.9 LA Operation Measurement procedure for Laser Align Ver. 2.1 ① Setting window parameters - 97 - Holdoff angle: The angle until the scanning starts to detect the next minimum width. Algorithm: The algorithm used to com…
- 96 -
As shown in Figure 7, the timing of vacuum off and that of blow on/off are the
same regardless of the part types. However, the parameter values of the
vacuum timer in Figure 6 differ for the part type because, for the Z axis, the
speed to move down and the time to be held differ per part type.
By performing blow control, the vacuum destruction time is shortened from 5 ms
(for KE-730/740 as shown in Figure 1) to 12 ms. As a result, a high vacuum
pressure can be maintained for mounting chip parts immediately before their
mount. For other part types, a high vacuum pressure is maintained until the
nozzle stops at the low position. Then, after releasing the vacuum pressure,
the nozzle is moved upward.
3.9 LA Operation
Measurement procedure for Laser Align Ver. 2.1
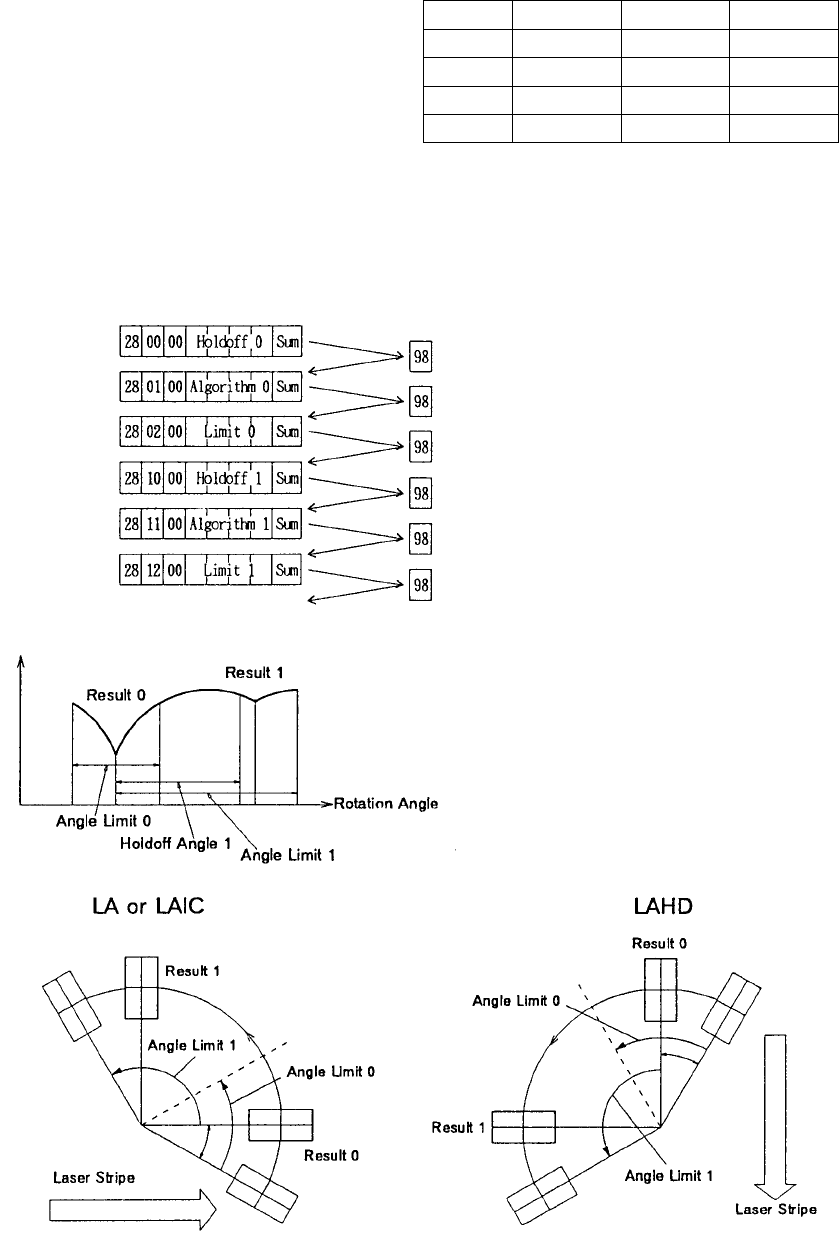
① Setting window parameters
- 97 -
Holdoff angle: The angle until
the scanning starts to detect the
next minimum width.
Algorithm: The algorithm
used to compute the minimum
width from the result of scanning.
Holdoff Angle
0°
85°
0°
0°
Algorithm
14
14
7
7
Angle Limit
60
120
∞
∞
*1
*1
Result 0
Result 1
Result 2
Result 3
Angle Limit: The angle within which if the minimum width is not detected,
an error is returned as the status of the result.
Parameters are set using LOAD_CMD (40).
Holdoff Angle 0
Algorithm 0
Angle Limit 0
Holdoff Angle 1
Algorithm 1
Angle Limit 1
*1: Setting for the result 2 and result 2 shall not be
changed from the default setting.
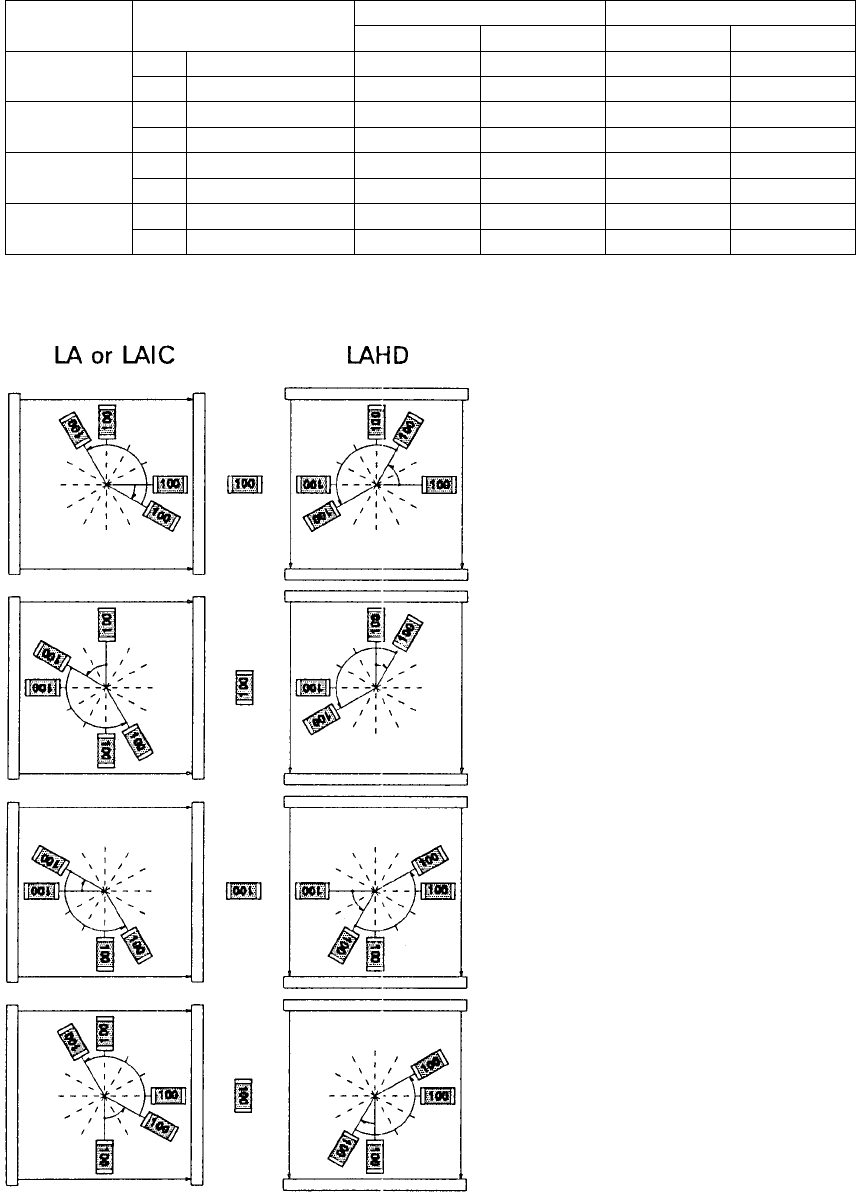
② Determining pre-load attitude
To make the pre-load angle small, the pre-load attitude is determined
according to the feeding angle of parts.
Feeding angle Head angle when pick
Pre-load attitude
Front
Rear
Front
Rear
Front
Rear
Front
Rear
0
90
180
270
0
180
90
270
180
0
270
90
LA or LAIC
330 (-30)
150 (-30)
150 (+60)
330 (+60)
150 (-30)
330 (-30)
330 (+60)
150 (+60)
LAHD
60 (+60)
240 (+60)
60 (-30)
240 (-30)
240 (+60)
60 (+60)
240 (-30)
60 (-30)
Part angle at minimum width
LA or LAIC LAHD
0
180
180
0
180
0
0
180
90
270
90
270
270
90
270
90
Front – 0°
Rear – 180°
Front – 90°
Rear – 270°
Front – 180°
Rear – 0°
Front – 270°
Rear – 90°
- 98 -