KE-750_MAINTE.pdf - 第101页
② Determining pre-load attitude To make the pre-load angle small, the pre-load attitude is determined according to the feeding angle of parts. Feeding angle Head angle when pick Pre-load attitude Front Rear Front Rear Fr…
3.9 LA Operation
Measurement procedure for Laser Align Ver. 2.1
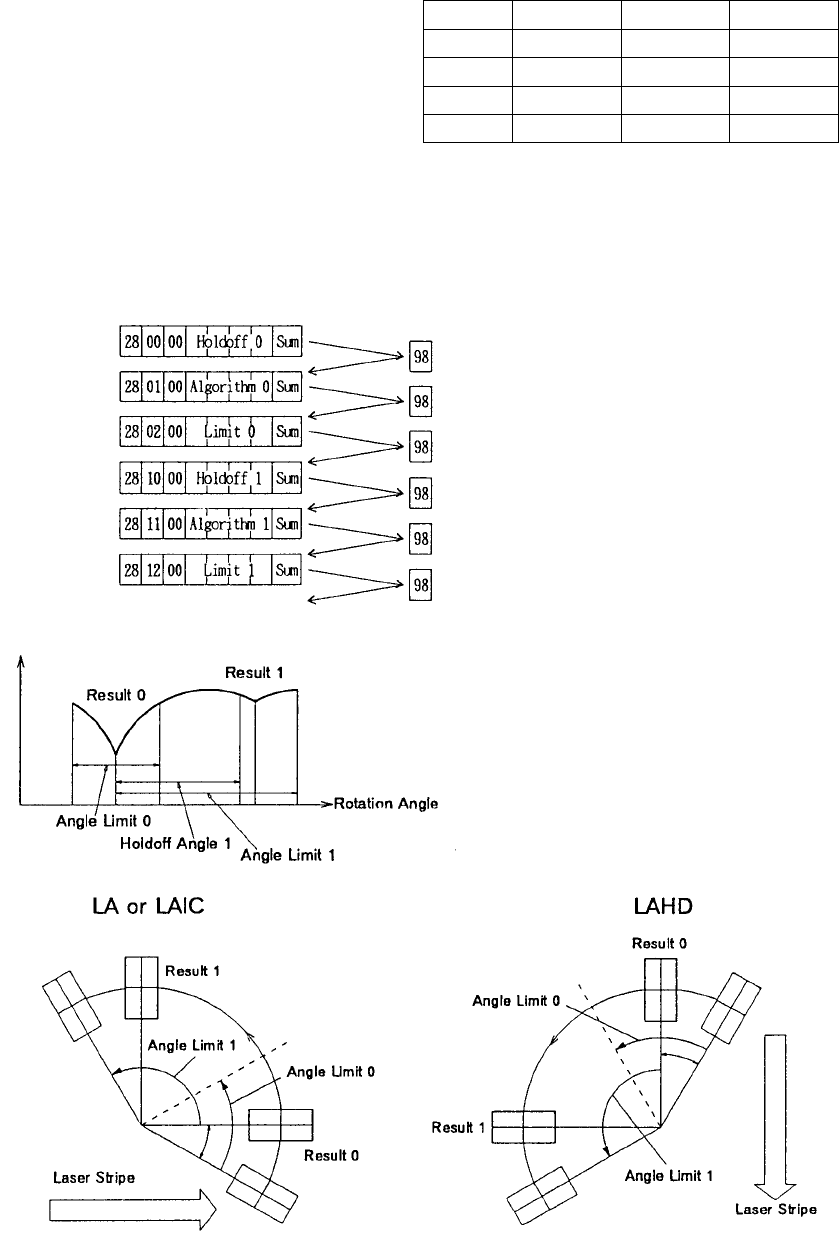
① Setting window parameters
- 97 -
Holdoff angle: The angle until
the scanning starts to detect the
next minimum width.
Algorithm: The algorithm
used to compute the minimum
width from the result of scanning.
Holdoff Angle
0°
85°
0°
0°
Algorithm
14
14
7
7
Angle Limit
60
120
∞
∞
*1
*1
Result 0
Result 1
Result 2
Result 3
Angle Limit: The angle within which if the minimum width is not detected,
an error is returned as the status of the result.
Parameters are set using LOAD_CMD (40).
Holdoff Angle 0
Algorithm 0
Angle Limit 0
Holdoff Angle 1
Algorithm 1
Angle Limit 1
*1: Setting for the result 2 and result 2 shall not be
changed from the default setting.
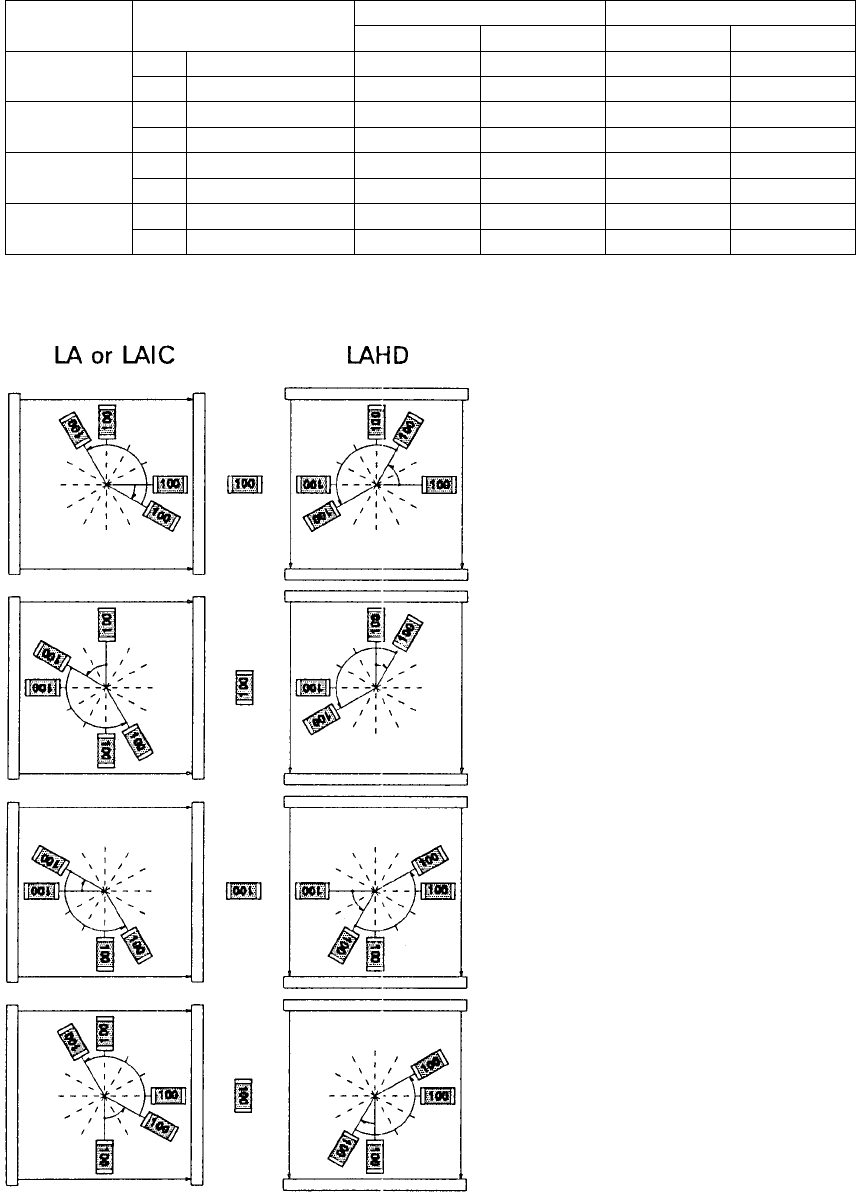
② Determining pre-load attitude
To make the pre-load angle small, the pre-load attitude is determined
according to the feeding angle of parts.
Feeding angle Head angle when pick
Pre-load attitude
Front
Rear
Front
Rear
Front
Rear
Front
Rear
0
90
180
270
0
180
90
270
180
0
270
90
LA or LAIC
330 (-30)
150 (-30)
150 (+60)
330 (+60)
150 (-30)
330 (-30)
330 (+60)
150 (+60)
LAHD
60 (+60)
240 (+60)
60 (-30)
240 (-30)
240 (+60)
60 (+60)
240 (-30)
60 (-30)
Part angle at minimum width
LA or LAIC LAHD
0
180
180
0
180
0
0
180
90
270
90
270
270
90
270
90
Front – 0°
Rear – 180°
Front – 90°
Rear – 270°
Front – 180°
Rear – 0°
Front – 270°
Rear – 90°
- 98 -
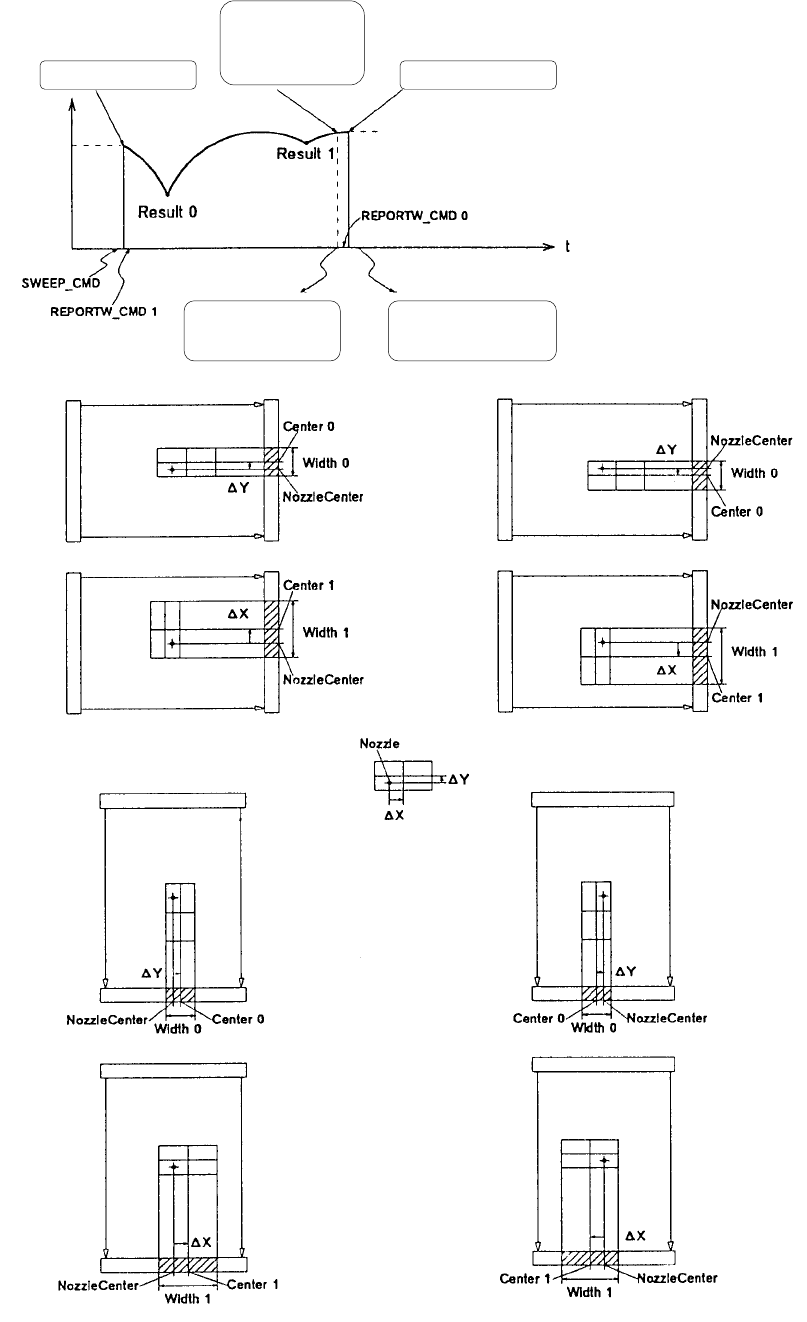
③ Measurement
- 99 -
Issuing SWEEP_CMD
↓
Starting rotation of θ axis
↓
Issuing REPORTW_CMD 1
↓
(Waiting the result)
↓
Obtaining Result 1
↓
Issuing REPORTW_CMD 0
↓
Obtaining Result 0
Completing
computation of
Result 1
Start of rotation End of rotation
Obtaining the
result of Result 1
Obtaining the
result of Result 0