KE-750_MAINTE.pdf - 第175页
- 34 - (2) XY axes No. Item A bbreviation Meaning Meaning of N, X, and Y 1 For XY axes PTP operation (High speed) pGx3Ctrl->stXy . H [X]. byVel pGx3Ctrl->stXy . H [X]. byAcl pGx3Ctrl->stXy . H [X]. lStrk pGx3Ctr…
- 33 -
6. MEANING OF SET VALUES OF MECHANISM
CONTROL PARAMETERS (TABLE 2)
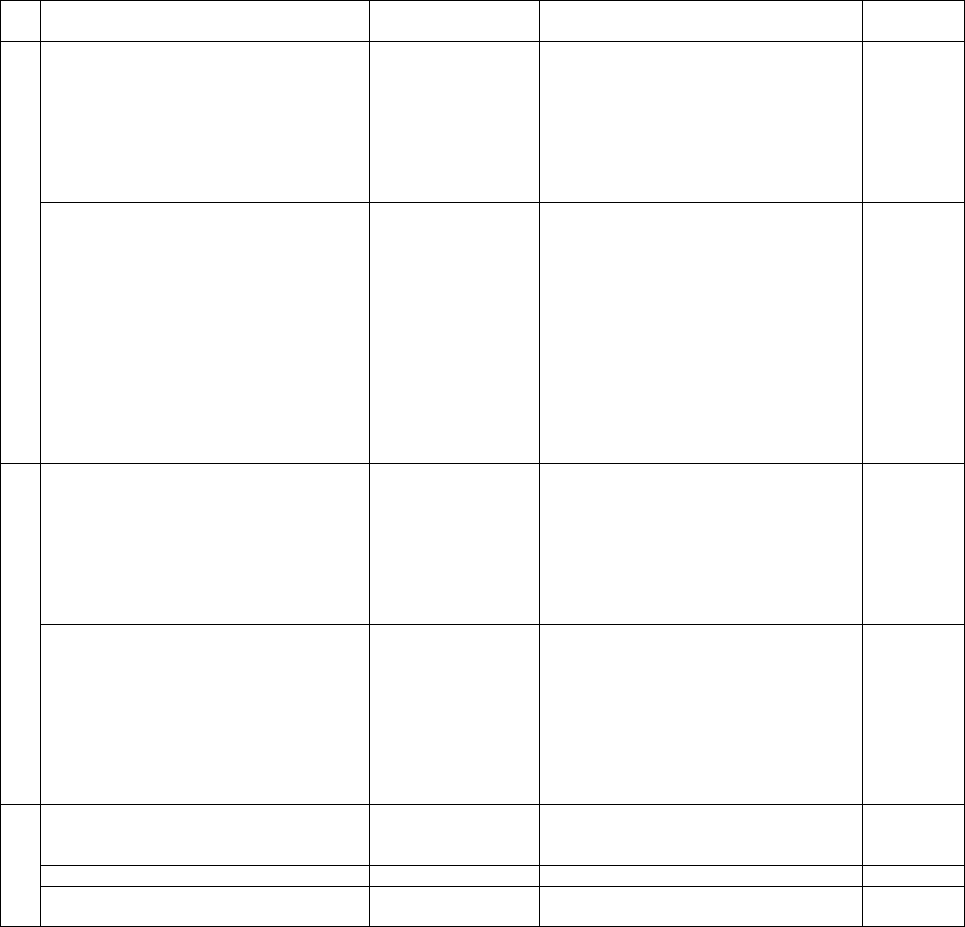
(1) Head N
No. Item Abbreviation Meaning
Meaning of
N, X, and Y
1 Head (Z axis)
pGx3Ctrl->stHead [N]. stZ. stMove [X] [Y]. dwVel
pGx3Ctrl->stHead [N]. stZ. stMove [X] [Y]. dwAcl
pGx3Ctrl->stHead [N]. stZ. stMove [X] [Y]. wDmpg
pHZM [X] [Y].dwVel or
[X] [Y]. dwVel, [X] [Y]
pHZM [X] [Y]. dwAcl or
[X] [Y]. dwAcl, [X] [Y]
pHZM [X] [Y] wDmpg or
[X] [Y]. wDmpg, [X] [Y]
Maximum speed of Z axis movement
Acceleration of Z axis movement
Damping waiting time of Z axis movement
N is head
number.
X is operation
type.
(*NOTE 1)
Y is part type.
(*NOTE 2)
pGx3Ctrl->stHead [N]. stZ. stEtcMove [X]. dwVel
pGx3Ctrl->stHead [N]. stZ. stEtcMove [X]. dwAcl
pGx3Ctrl->stHead [N]. stZ. stEtcMove [X]. wDmpg
pGx3Ctrl->stHead [N]. stZ. stCoverOpen. dwVel
pGx3Ctrl->stHead [N]. stZ. stCoverOpen. dwAcl
pGx3Ctrl->stHead [N]. stZ. stCoverOpen. wDmpg
pGx3Ctrl->stHead [N]. stZ lOnePls
pGx3Ctrl->stHead [N]. stZ lMdlSp
pGx3Ctrl->stHead [N]. stZ lLowSp
pGx3Ctrl->stHead [N]. lZDownEnbY
Maximum speed for operation other than Z axis
PTP
Acceleration for operation other than Z axis PTP
Damping waiting time for operation other than Z
axis PTP
Maximum speed when cover open
Acceleration when cover open
Damping waiting time when cover open
Internal data increase of Z axis per pulse of Z axis
Ratio of medium speed of Z axis to high speed
(%)
Ratio of low speed of Z axis to high speed (%)
Y coordinate to which Z axis can go down
N is head
number.
X is operation
type.
(*NOTE 3)
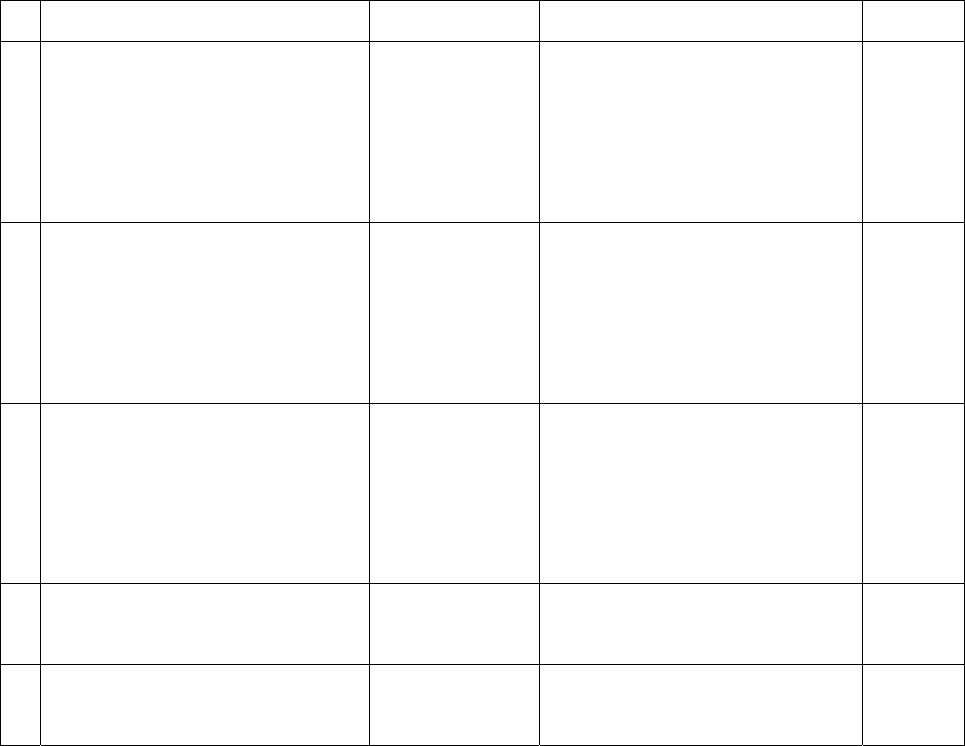
2 Head (θ axis)
pGx3Ctrl->stHead [N]. stZ. stMove [X] [Y]. dwVel
pGx3Ctrl->stHead [N]. stZ. stMove [X] [Y]. dwAcl
pGx3Ctrl->stHead [N]. stZ. stMove [X] [Y]. wDmpg
pHTM [X] [Y].dwVel or
[X] [Y].dwVel,[X] [Y]
pHTM [X] [Y].dwAcl or
[X] [Y].dwAcl,[X] [Y]
pHTM [X] [Y] wDmpg or
[X] [Y].wDmpg,[X] [Y]
Maximum speed of θ axis movement
Acceleration of θ axis movement
Damping waiting time of θ axis movement
N is head
number.
X is operation
type.
(*NOTE 4)
Y is part type.
(*NOTE 5)
pGx3Ctrl->stHead [N]. stZ. stEtcMove [X]. dwVel
pGx3Ctrl->stHead [N]. stZ. stEtcMove [X]. dwAcl
pGx3Ctrl->stHead [N]. stZ. stEtcMove [X]. wDmpg
pGx3Ctrl->stHead [N]. stZ. stNoCompo. dwVel
pGx3Ctrl->stHead [N]. stZ. stNoCompo. dwAcl
pGx3Ctrl->stHead [N]. stZ. stNoCompo. wDmpg
pGx3Ctrl->stHead [N]. stZ lOnePls
pHTEM [X]. dwVel
pHTEM [X]. dwAcl
pHTEM [X]. wDmpg
Maximum speed for operation other than θ axis
PTP
Acceleration for operation other than θ axis PTP
Damping waiting time for operation other than θ
axis PTP
Maximum speed of θ axis without parts
Acceleration of θ axis without parts
Damping waiting time of θ axis without parts
Internal data increase of θ axis per pulse of θ axis
N is head
number.
X is operation
type.
(*NOTE 6)
3 Head (Laser)
pGx3Ctrl->stHead [N]. stLas. lHoldoffCnt [X]
Laser hold off count
N is head
number.
X: (*NOTE 7)
pGx3Ctrl->stHead [N]. stLas. wWaitCalcT [X] Laser computation waiting time X: (*NOTE 8)
pGx3Ctrl->stHead [N]. stLas. lPreLoadAngle [X]
pGx3Ctrl->stHead [N]. stLas. lAlgoThresh [X]
Laser pre-load angle
Laser algorithm change threshold
X: (*NOTE 9)
- 34 -
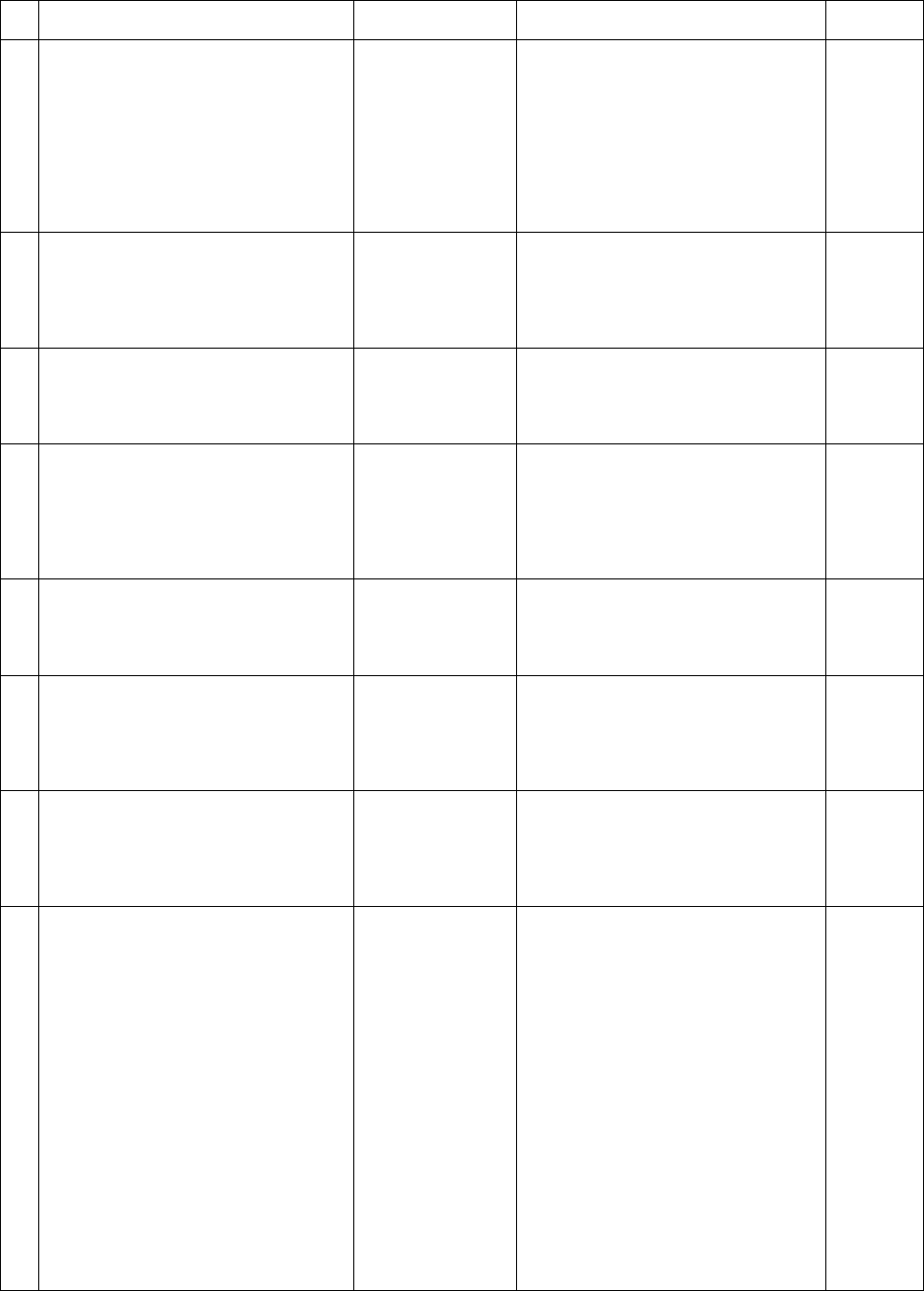
(2) XY axes
No. Item Abbreviation Meaning
Meaning of
N, X, and Y
1 For XY axes PTP operation (High speed)
pGx3Ctrl->stXy. H [X]. byVel
pGx3Ctrl->stXy. H [X]. byAcl
pGx3Ctrl->stXy. H [X]. lStrk
pGx3Ctrl->stXy. H [X]. wPicDmpg [Y]
pGx3Ctrl->stXy. H [X]. wPlcDmpg [Y]
pGx3Ctrl->stXy. H [X]. wElseDmpg [Z]
pXH. byVel
pXH byAcl
pXH. lStrk
pXH. wPicDmpg [Y]
pXH. wPlcDmpg [Y]
pXH. wElseDmpg [Z]
Maximum speed
Acceleration
Stroke
Damping waiting time at pick position
Damping waiting time at mount position
Damping waiting time at other positions
X is strk
range.
(*NOTE 10)
Y is part
type. (*NOTE
11)
Z is moving
direction.
(*NOTE 12)
2 For XY axes PTP operation (Medium speed)
pGx3Ctrl->stXy. M [X]. byVel
pGx3Ctrl->stXy. M [X]. byAcl
pGx3Ctrl->stXy. M [X]. lStrk
pGx3Ctrl->stXy. M [X]. wPicDmpg [Y]
pGx3Ctrl->stXy. M [X]. wPlcDmpg [Y]
pGx3Ctrl->stXy. M [X]. wElseDmpg [Z]
pXM. byVel
pXM byAcl
pXM. lStrk
pXM. wPicDmpg [Y]
pXM. wPlcDmpg [Y]
pXM. wElseDmpg [Z]
Maximum speed
Acceleration
Stroke
Damping waiting time at pick position
Damping waiting time at mount position
Damping waiting time at other positions
X is strk
range.
(*NOTE 10)
Y is part
type. (*NOTE
11)
Z is moving
direction.
(*NOTE 12)
3 For XY axes PTP operation (Low speed)
pGx3Ctrl->stXy. L [X]. byVel
pGx3Ctrl->stXy. L [X]. byAcl
pGx3Ctrl->stXy. L [X]. lStrk
pGx3Ctrl->stXy. L [X]. wPicDmpg [Y]
pGx3Ctrl->stXy. L [X]. wPlcDmpg [Y]
pGx3Ctrl->stXy. L [X]. wElseDmpg [Z]
pXL. byVel
pXL byAcl
pXL. lStrk
pXL. wPicDmpg [Y]
pXL. wPlcDmpg [Y]
pXL. wElseDmpg [Z]
Maximum speed
Acceleration
Stroke
Damping waiting time at pick position
Damping waiting time at mount position
Damping waiting time at other positions
X is strk
range.
(*NOTE 10)
Y is part
type. (*NOTE
11)
Z is moving
direction.
(*NOTE 12)
4 For operation other than XY axes PTP operation
pGx3Ctrl->stXy. stEtcSp [X]. byVel
pGx3Ctrl->stXy. stEtcSp [X]. byAcl
pGx3Ctrl->stXy. stEtcSp [X]. wDmpg
Maximum speed
Acceleration
Stroke
X is
operation
type. (*NOTE
13)
5 For XY axes (Cover open)
pGx3Ctrl->stXy. stCover. byVel
pGx3Ctrl->stXy. stCover. byAcl
pGx3Ctrl->stXy. stCover. wDmpg
Maximum speed
Acceleration
Stroke
- 35 -
(3) Others
No. Item Abbreviation Meaning
Meaning of
N, X, and Y
1 Nozzle information
pGx3Ctrl->stNozzle [X]. byNozzleThreshold
pGx3Ctrl->stNozzle [X]. byCmpntThreshold
pGx3Ctrl->stNozzle [X]. byTimeout
pGx3Ctrl->stNozzle [X]. byPlaceVacuumWait
pGx3Ctrl->stNozzle [X]. byCmpntThreshold2
pGx3Ctrl->stNozzle [X]. stPick. lX
pGx3Ctrl->stNozzle [X]. stPick. lY
Nozzle YES/NO check threshold
Part YES/NO check threshold (check when
picked)
Waiting time for part YES/NO check completion
Waiting time for mount vacuum off
Part YES/NO check threshold (Check before
mounting)
X direction simultaneous pick range
Y direction simultaneous pick range
X is nozzle
number.
(*NOTE 14)
2 ATC
pGx3Ctrl->stXy. stAtc [X]. wZDownWait
pGx3Ctrl->stXy. stAtc [X]. wZUpWait
pGx3Ctrl->stXy. stAtc [X]. wTimeout
pGx3Ctrl->stXy. stAtc [X]. wCloseTime
Waiting time for Z down
Time from plate sensor on to Z up
Timeout duration from plate open/close to plate
sensor check
Time for plate close operation completion
X = 0 (used)
X = 1 (Spare)
3 Laser read locator
pGx3trl->stL3. lAccelSection
pGx3trl->stL3. lScanFromTip
pGx3trl->stL3. lRetryPitch
pGx3trl->stL3. lRetry
Acceleration distance for detection
Scanning position from the pin tip
Offset amount of scanning position for retry
The number of retries
4 Others
pGx3Ctrl->wPushInPlace
pGx3Ctrl->wPushInPick
pGx3Ctrl->wPreLoadStarTime [X]
pGx3Ctrl->wPickAdjustTime
pGx3Ctrl->wChipCoef
Push in amount when mounting
Push in amount when picking
Pre-load start time
The number of automatic pick position correction
Coefficient for part rise detection height
computation
X: (*NOTE
15)
5 Version information
pGx3Ctrl->symbol
pGx3Ctrl->stKind. byspec
pGx3Ctrl->stKind. byStructVer
pGx3Ctrl->stKind. byPrmtrVer
Symbol (Information on initialization)
Mechanism parameters per specification
Version of body
Version of data content (Default values)
6 Vacuum waiting time (ms) per part type
pGx3Ctrl->stCmpnt [X]. wPickVac
pGx3Ctrl->stCmpnt [X]. wPlaceVac
pGx3Ctrl->stCmpnt [X]. wBlowOff
pGx3Ctrl->stCmpnt [X]. wVacOff
pC [X]. wPickVac
pC [X]. wPlaceVac
pC [X]. wBlow
pC [X]. wVacOff
Waiting time for pick vacuum
Waiting time for mount vacuum
Blow stop duration before moving up of mount
Vacuum stop duration before completing to
move down mount Z axis
X is part
type. (*NOTE
16)
7 Vacuum waiting time 2 (ms) per part type
pGx3Ctrl->stCmpnt2 [X]. wBlowOn
pGx3Ctrl->stCmpnt2 [X]. wRsv1
pGx3Ctrl->stCmpnt2 [X]. wRsv2
pGx3Ctrl->stCmpnt2 [X]. wRsv3
pC [X]. wBlowOn
pC [X]. wRsv1
pC [X]. wRsv2
pC [X]. wRsv3
Blow start time before completing to move down
mount Z axis
Reserved
Reserved
Reserved
X is part
type. (*NOTE
16)
8 Other waiting times (ms)
pGx3Ctrl->stWaitTime. wVcsStd
pGx3Ctrl->stWaitTime. wVcs03
pGx3Ctrl->stWaitTime. wBocMark
pGx3Ctrl->stWaitTime. wIcMark
pGx3Ctrl->stWaitTime. wLaSweep
pGx3Ctrl->stWaitTime. wLaOnce
pGx3Ctrl->stWaitTime. wZPlace
pGx3Ctrl->stWaitTime. wScrapBlow
pGx3Ctrl->stWaitTime. wZGainLow
pGx3Ctrl->stWaitTime. wBadMark
Gx3Ctrl->stWaitTime. wRsv [Y]
pWT. wVcsStd
pWT. wVcs03
pWT. wBocMark
pWT. wIcMark
pWT. wLaSweep
pWT. wLaOnce
pWT. wZPlace
pWT. wScrapBlow
pWT. wZGainLow
pWT. wBadMark
pWT. wRsv [Y]
Time after moving Z axis to standard VCS until
taking the part image
Time after moving Z axis to 0.3 mm VCS until
taking the part image
Time after moving to the BOC mark until taking
the mark image
Time after moving to the IC mark until taking the
mark image
Time after starting to move XY axes until starting
SWEEP
Time after starting to move XY axes until starting
ONCE
Time after finishing to move XY axes until
moving down Z axis
Blow time when discarding parts
Low gain duration of Z axis
Time after moving to bad mark until taking the
mark image
Reserved
Y is the
number of
reservation.