KE-750_MAINTE.pdf - 第48页
3. SEQUENCE OF FUNCTIONS 3.1 Origin Return Operation An origin return operation is carried out by pressing the ORIGIN key. The origin return for Z axis, θ axis, and XY axes are sequentially performed. 3.1.1 Z axis Origin…
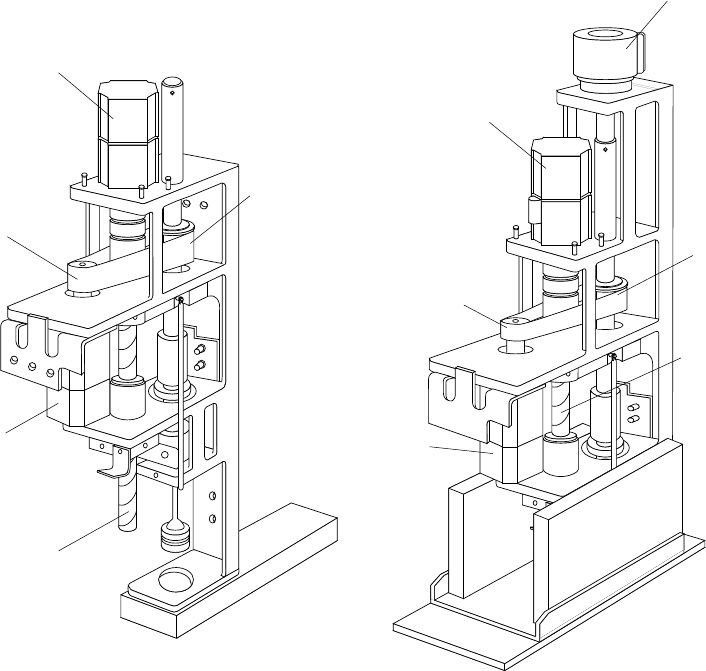
2.2 Explanation on Z/θ axes
[LAHD head] [LAIC head]
Z motor (30 W)
encoder, 1000 ppr
θ motor pulley
θ motor pulley
θ pulley
θ pulley
θ motor (30 W)
encoder, 2000 ppr
Ball screw
(10 mm lead)
θ encoder,
18000 ppr
Z motor (30 W)
encoder, 1000 ppr
Ball screw
(10 mm lead)
θ motor (30 W)
encoder, 2000 ppr
NOTE: Z and θ axes of the LA head are the same as that of the LAHD.
(1) Resolution of θ axis
When the laser recognition is installed for the LAHD, LA head, and LAIC
head
θ axis deceleration ratio: 2.25
θ motor encoder:
2000 pulses/round (8000 pulses/round when multiplied by 4)
Therefore: Resolution is 360/8000 × 2.25 = 0.02 deg/pulse
When the vision recognition is installed for LAIC head
θ axis direct couple encoder:
18000 pulses/round (72000 pulses/round when multiplied by 4)
Therefore: Resolution is 360/72000 = 0.005 deg/pulse
- 44 -
3. SEQUENCE OF FUNCTIONS
3.1 Origin Return Operation
An origin return operation is carried out by pressing the ORIGIN key. The
origin return for Z axis, θ axis, and XY axes are sequentially performed.
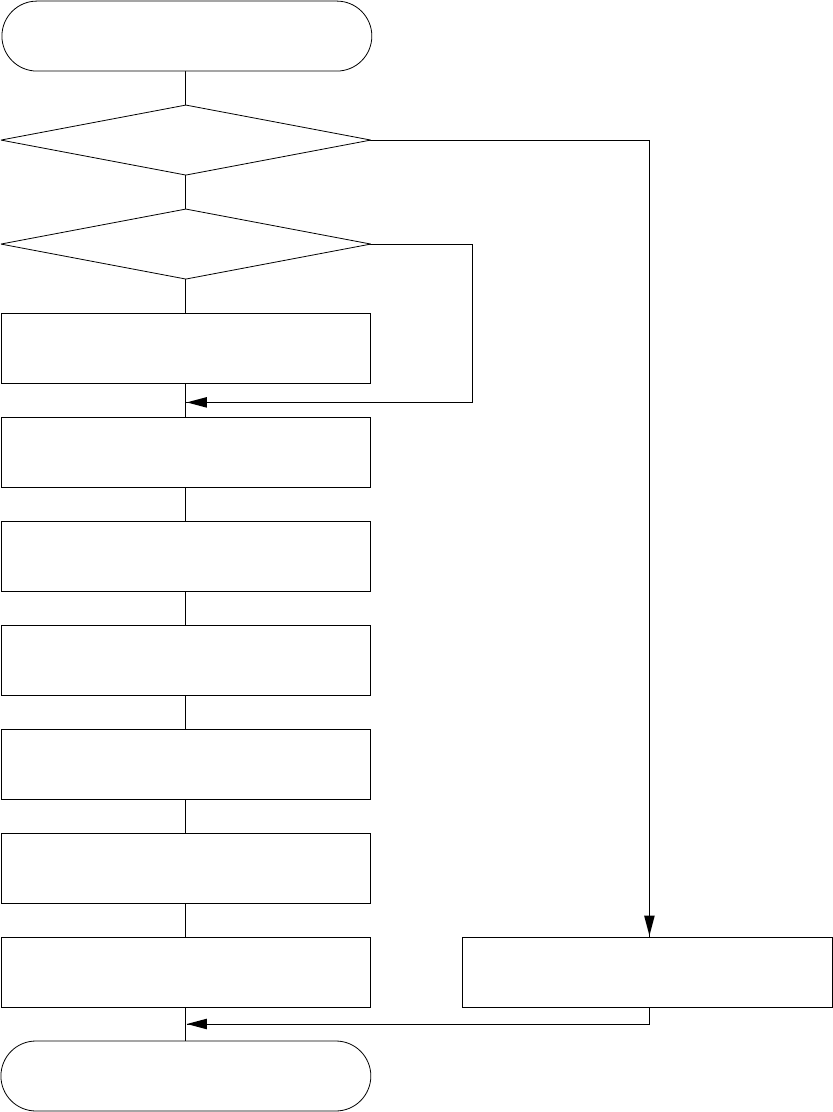
3.1.1 Z axis
Origin return for Z axis
Alarm?
Origin deceleration sensor OK?
Move until the origin deceleration
sensor turns off.
Move until the origin deceleration
sensor turns on.
Move away from the origin deceleration
sensor.
Move by 1 step until the origin
deceleration sensor turns on.
Move by 1 step until the index pulse is
detected.
Initialization of work data
Considered to be normal Considered to be faulty
End
YES
NO
NO
YES
- 45 -
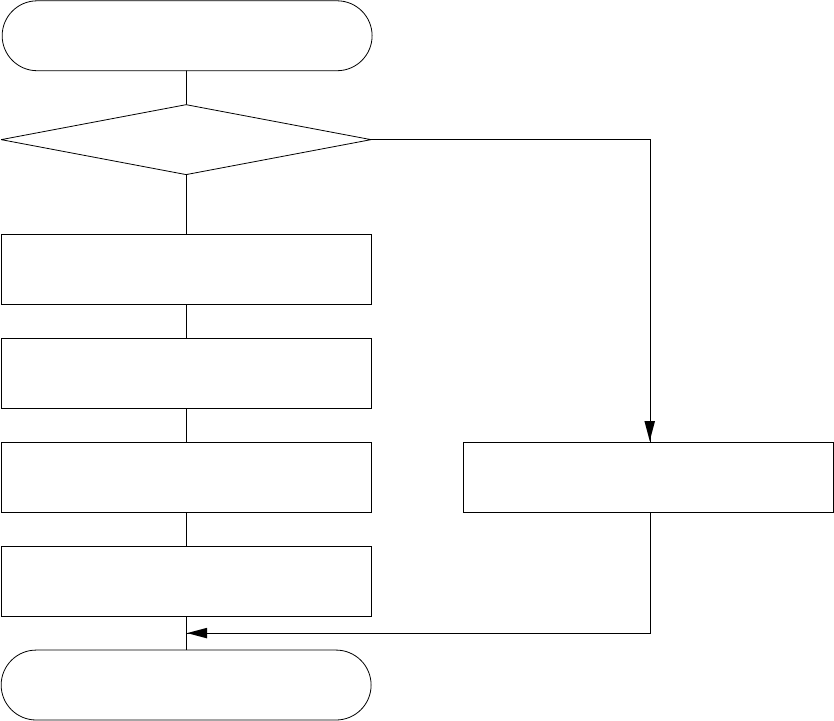
3.1.2 θ axis
θ axis origin return
Alarm?
Move by 1 step.
Initialization of work data
LA initialization
Considered to be normal
Considered to be faulty
End
YES
NO
- 46 -