KE-750_MAINTE.pdf - 第203页
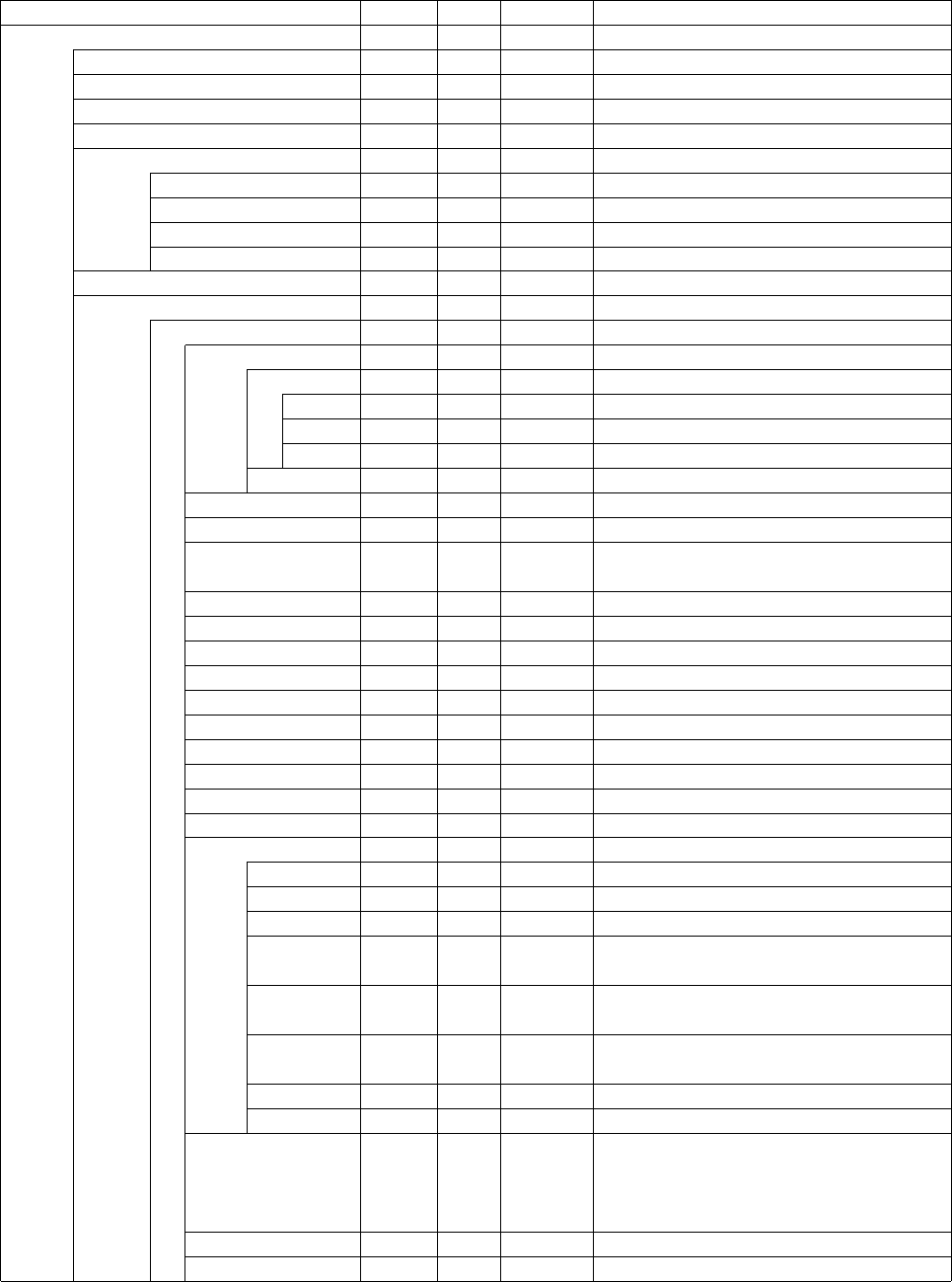
- 6 2 - (2) Variable page Variables Checksum Structure version Matching check character train Last edit time Version type Mechanism parameter destination Structure version Data version Reserved Symbol Z axis speed profil…
- 61 -
WORD wPushInPlace;
WORD wPshInPick;
struct tCtrAtc {
WORD wZDownWait;
WORD wZUpWait;
WORD wTimeout;
WORD wCloseTime;
} stAtc[2];
struct tCtrlL3 {
LONG lAccelSection;
LONG lScanFromTip;
LONG lRetryPitch;
LONG lRetry;
} stL3;
struct tCtrlCmpnt2 {
WORD wBlowOn;
WORD wRsv1;
WORD wRsv2;
WORD wRsv3;
} stCmpnt2[50];
struct tCtrlCmpnt {
WORD wPickVac;
WORD wPlaceVac;
WORD wBlowOff;
WORD wVacOff;
} stCmpnt[50];
struct tCtrlWaitTime {
WORD wVcsStd;
WORD wVcs03;
WORD wBocMark;
WORD wIcMark;
WORD wLaSweep;
WORD wLaOnce;
WORD wZplace;
WORD wScrapBlow;
WORD wZGainLow;
WORD wBadMark;
WORD wRsv[4];
} stWaitTime;
WORD wChipCoef;
WORD wConvyerSpec;
WORD wPickAdjustTime;
WORD wDiffCompoRatio;
WORD wDiffCompoChip;
WORD wDiffCompoOther;
WORD wLasChkLevel;
WORD wLasChkCount;
WORD wLasChkRsv1;
WORD wLasChkRsv2;
tPos stNzlChgRange;
tPos stVcsStdDist;
tPos stVcsOptDist;
struct tLasImgChk {
LONG lDarkLevel;
LONG lMinPixel;
LONG lMinLowPass;
LONG lBackground;
LONG lMaxLowPass;
LONG lMaxPixel;
LONG lRmsMidFreq;
LONG lMaxMidFreq;
LONG lRmsHiFreq;
LONG lAbsHiFreq;
LONG lEvenOdd;
LONG lNonFlat;
} stLasChkLimit[2];
WORD wRsv[30];
};
// Push in amount when mounted
// Push in amount when picked
// ATC
// Waiting time for Z downward movement
// Time from plate sensor ON to Z upward movement
// Timeout duration from plate open/close drive to plate sensor check
// Plate closing operation completion time
//
// Laser read locator
// Distance for acceleration when detection
// Scanning position from the pin tip
// The amount of scanning offset when retry
// The number of retries
// Waiting time per part type
// Blow start time before mount Z downward movement completion
// Reserved
// Reserved
// Reserved
//
// Waiting time per part type
// Waiting time for part vacuum
// Waiting time for mount vacuum
// Blow stop time before lifting up for mount
// Vacuum stop time before mount Z downward movement completion
//
// Waiting times
// Time until part vision after Z axis moves to standard VCS
// Time until part vision after Z axis moves to 0.3 mm VCS
// Time until mark vision after move to BOC mark
// Time until mark vision after move to IC mark
// Time until SWEEP start after XY axes movement start
// Time until ONCE start after XY axes movement start
// Time for Z axis downwards movement after XY axes movement finish
// Blow time when part discarded
// Z axis gain low time
// Time for mark read after move to bad mark
// Reserved
//
// Chip rise YES/NO height computation coefficient
// Classification board carriage specification
// Number of pick position automatic adjustment
// Different part check coefficient (To the ratio depth/width)
// Different part check coefficient (Chip, Melf, SOT)
// Different part check coefficient (Other than the above)
// Stain check level (Default 80)
// Stain check CCD count (Default 1)
// Spare 1 for relativity check
// Spare 2 for relativity check
// Simultaneous nozzle change range
// For standard VCS
// For option VCS
// Limit value to result of image check command
// Dark Level
// Min raw pixel value
// Min low-pass filtered value
// Median background level
// Max low-pass filtered value
// Max raw pixel value
// RMS median filtered noise 8.8
// Max median filtered error 8.8
// RMS high frequency noise 8.8
// Absolute high frequency noise 8.8
// Even-odd pixel value mismatch 8.8
// RMS low frequency noise 8.8
// [0] LAFM / [1] LAHD
// 4 x 12 = 48 Bytes (24 Words) x 2
// Reserved
- 62 -
(2) Variable page
Variables
Checksum
Structure version
Matching check character train
Last edit time
Version type
Mechanism parameter destination
Structure version
Data version
Reserved
Symbol
Z axis speed profile
When moving upwards without part
Part type 0
Maximum speed
Acceleration
Waiting time for dumping
Part type 1 to 9
When moving downwards without part
When moving to laser height after part pick
When moving upwards after part pick (other
than laser height)
When moving downwards for part pick
When moving upwards after part mount
When moving downwards for part mount
When moving upwards at recognized position
When moving downwards at recognized position
When moving upwards at ATC position
When moving downwards at ATC position
When moving upwards at other positions
When moving downwards at other positions
Cover open
Operation other than PTP
JOG operation start
JOG operation stop
STEP operation
PTP start operation in upward direction when
origin return
PTP stop operation in upward direction when
origin return
PTP start operation in downwards direction
when origin return
STEP operation when origin return
Reserved
An increase of Z axis internal data per pulse
LA head 25 (1 pulse = 0.0025 mm)
LAHD head 25 (1 pulse = 0.0025 mm)
LAIC head 25 (1 pulse = 0.0025 mm)
Ratio of medium speed to high speed
Ratio of low speed to high speed
Unit
‹11448
PPS
PPS
2
msec
0.0001mm
Length
1
1
8
4
6
1
1
1
3
2
1432
100
10
4
4
2
90
100
100
100
100
100
100
100
100
100
100
100
100
10
110
10
10
10
10
10
10
10
40
4
4
4
Data type
BYTE
BYTE
CHAR
time_t
BYTE
BYTE
BYTE
BYTE
CHAR
DWORD
DWORD
WORD
tZtSp
tZtSp
tZtSp
tZtSp
tZtSp
tZtSp
tZtSp
tZtSp
tZtSp
LONG
LONG
LONG
dwVel
dwAcl
wDmpg
[0]
[1] – [9]
[0]
[1]
[2]
[3]
[4]
[5]
[6]
[7] – [10]
stMove [0]
stMove [1]
stMove [2]
stMove [3]
stMove [4]
stMove [5]
stMove [6]
stMove [7]
stMove [8]
stMove [9]
stMove [10]
stMove [11]
stMove [12]
stCoverOpen
stEtcMove
lOnePls
lMdlSp
lLowSp
bySpec
byStructVer
byPrmtrVer
byRsv [3]
stZ
byCheckSum
bySTructVer
szCheckWord [8]
timeLastEdit
stKind
symbol [2]
stHead [6]
tGx3Ctrl
Description
- 63 -
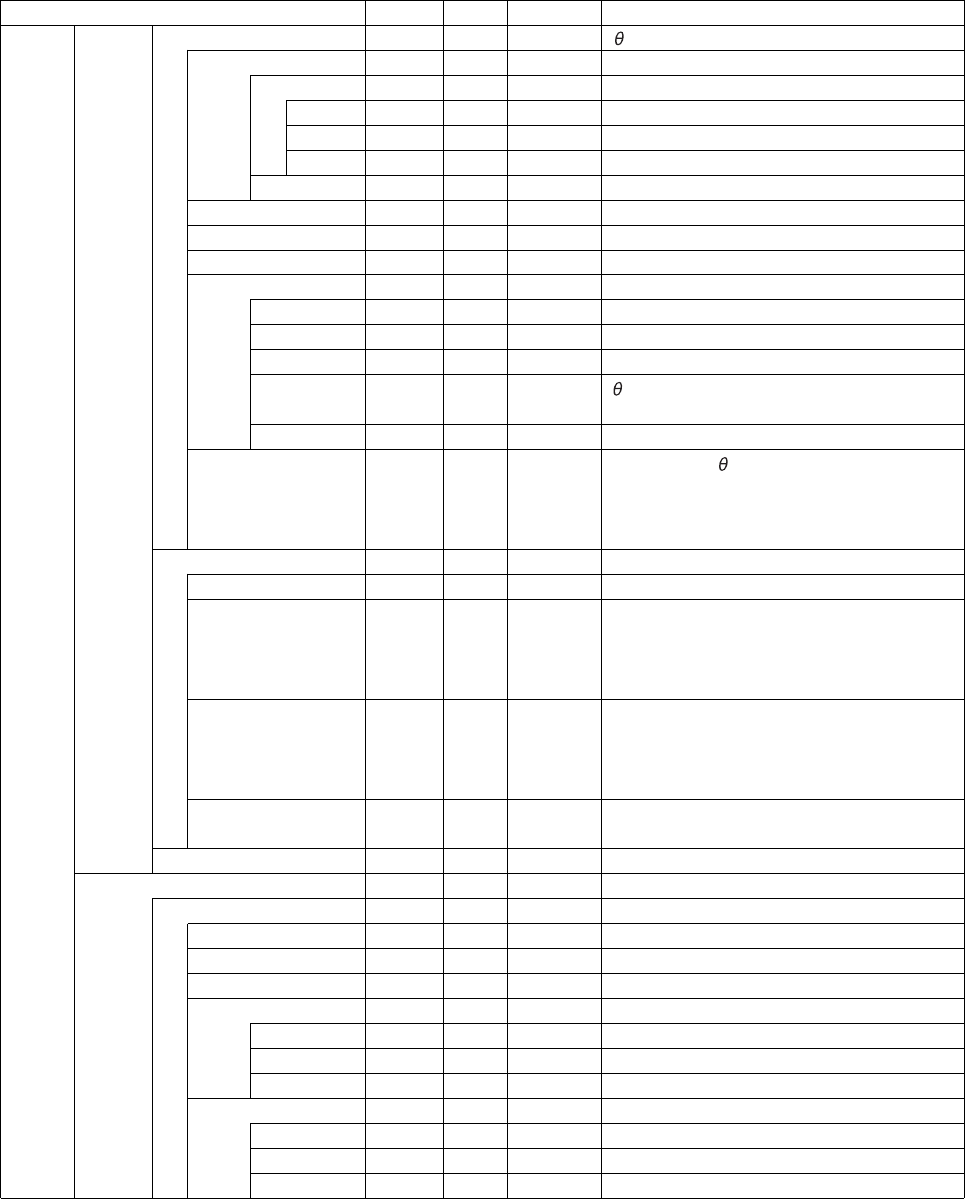
Variables
axis speed profile
When preload
Part type 0
Maximum speed
Acceleration
Waiting time for dumping
Part type 1 to 9
When part measurement
When rotating the parts to the mount angle
Table when no parts
Operation other than PTP
JOG operation start
JOG operation stop
STEP operation
axis operation when origin return of 2nd times
and after
Reserved
An increase of axis internal data per pulse
LA head 200 (1 pulse = 0.02°)
LAHD head 200 (1 pulse = 0.02°)
LAIC head 50 (1 pulse = 0.005°)
Laser
Laser measurement preload angle
Computation waiting time for algorithm (11, -11)
Computation waiting time for algorithm (11, 11)
Computation waiting time for algorithm (14, 14)
Reserved
Hold off count for algorithm (11, -11)
Hold off count for algorithm (11, 11)
Hold off count for algorithm (14, 14)
Reserved
Algorithm change threshold depending of chip
size of chip parts
Y coordinate possible for downward movement
High speed movement
Stroke (The number of pulses)
Maximum speed
Time constant (Acceleration)
Waiting time for dumping at pick position
Part type 0 to 9
No part
Cover open
Dumping time at mount position
Part type 0 to 9
No part
Cover open
Unit
PPS
2
PPS
msec
0.0001°
msec
msec
msec
msec
0.1µm
Pulse
Kpps
msec
msec
msec
msec
msec
msec
msec
Length
384
100
10
4
4
2
90
100
100
10
70
10
10
10
10
30
4
88
24
2
2
2
14
4
4
4
28
4
4
2284
74
4
1
1
24
20
2
2
24
20
2
2
Data type
DWORD
DWORD
WORD
tZTSp
tZTSp
tZTSp
tZTSp
tZTSp
tZTSp
LONG
LONG
WORD
WORD
WORD
WORD
LONG
LONG
LONG
LONG
LONG
LONG
LONG
BYTE
BYTE
WORD
WORD
WORD
WORD
WORD
WORD
Description
The number of pulses
The number of pulses
The number of pulses
The number of pulses
The number of pulses
dwVel
dwAcl
wDmpg
stXy
stMove [0]
stMove [1]
stMove [2]
stNoCompo
stEtcMove
lOnePls
lPreLoadAngle [6]
wWaitCalcT [0]
[1]
[2]
[3] – [9]
lHoldOffCnt [0]
[1]
[2]
[3] – [9]
lAlgoThresh
lStroke
byVel
byAcl
wPlcDmpg [12]
wPlcDmpg [12]
[0]
[1] – [9]
[0]
[1]
[2]
[3]
[4] – [6]
[0] – [9]
[10]
[11]
[0] – [9]
[10]
[11]
stT
stLas
lZDownEnby
H [0] High speed