KE-750_MAINTE.pdf - 第174页
- 33 - 6. MEANING OF SET VALUES OF MECHANISM CONTROL PARAMETERS (TABLE 2) (1) Head N No. Item A bbreviation Meaning Meaning of N, X, and Y 1 Head (Z axis) pGx3Ctrl->stHead [N]. stZ. stMove [X] [Y]. dw Vel pGx3Ctrl->…
No.
of
digits
No. of arrays
Item
Setting range
Minimum
value
Maximum
value
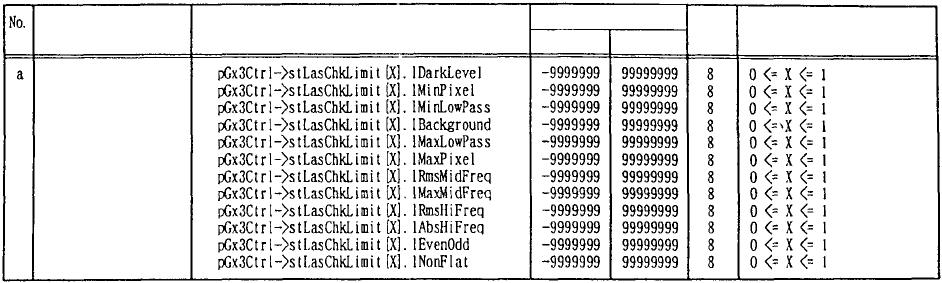
Limit value of laser
stain check
- 32 -
- 33 -
6. MEANING OF SET VALUES OF MECHANISM
CONTROL PARAMETERS (TABLE 2)
(1) Head N
No. Item Abbreviation Meaning
Meaning of
N, X, and Y
1 Head (Z axis)
pGx3Ctrl->stHead [N]. stZ. stMove [X] [Y]. dwVel
pGx3Ctrl->stHead [N]. stZ. stMove [X] [Y]. dwAcl
pGx3Ctrl->stHead [N]. stZ. stMove [X] [Y]. wDmpg
pHZM [X] [Y].dwVel or
[X] [Y]. dwVel, [X] [Y]
pHZM [X] [Y]. dwAcl or
[X] [Y]. dwAcl, [X] [Y]
pHZM [X] [Y] wDmpg or
[X] [Y]. wDmpg, [X] [Y]
Maximum speed of Z axis movement
Acceleration of Z axis movement
Damping waiting time of Z axis movement
N is head
number.
X is operation
type.
(*NOTE 1)
Y is part type.
(*NOTE 2)
pGx3Ctrl->stHead [N]. stZ. stEtcMove [X]. dwVel
pGx3Ctrl->stHead [N]. stZ. stEtcMove [X]. dwAcl
pGx3Ctrl->stHead [N]. stZ. stEtcMove [X]. wDmpg
pGx3Ctrl->stHead [N]. stZ. stCoverOpen. dwVel
pGx3Ctrl->stHead [N]. stZ. stCoverOpen. dwAcl
pGx3Ctrl->stHead [N]. stZ. stCoverOpen. wDmpg
pGx3Ctrl->stHead [N]. stZ lOnePls
pGx3Ctrl->stHead [N]. stZ lMdlSp
pGx3Ctrl->stHead [N]. stZ lLowSp
pGx3Ctrl->stHead [N]. lZDownEnbY
Maximum speed for operation other than Z axis
PTP
Acceleration for operation other than Z axis PTP
Damping waiting time for operation other than Z
axis PTP
Maximum speed when cover open
Acceleration when cover open
Damping waiting time when cover open
Internal data increase of Z axis per pulse of Z axis
Ratio of medium speed of Z axis to high speed
(%)
Ratio of low speed of Z axis to high speed (%)
Y coordinate to which Z axis can go down
N is head
number.
X is operation
type.
(*NOTE 3)
2 Head (θ axis)
pGx3Ctrl->stHead [N]. stZ. stMove [X] [Y]. dwVel
pGx3Ctrl->stHead [N]. stZ. stMove [X] [Y]. dwAcl
pGx3Ctrl->stHead [N]. stZ. stMove [X] [Y]. wDmpg
pHTM [X] [Y].dwVel or
[X] [Y].dwVel,[X] [Y]
pHTM [X] [Y].dwAcl or
[X] [Y].dwAcl,[X] [Y]
pHTM [X] [Y] wDmpg or
[X] [Y].wDmpg,[X] [Y]
Maximum speed of θ axis movement
Acceleration of θ axis movement
Damping waiting time of θ axis movement
N is head
number.
X is operation
type.
(*NOTE 4)
Y is part type.
(*NOTE 5)
pGx3Ctrl->stHead [N]. stZ. stEtcMove [X]. dwVel
pGx3Ctrl->stHead [N]. stZ. stEtcMove [X]. dwAcl
pGx3Ctrl->stHead [N]. stZ. stEtcMove [X]. wDmpg
pGx3Ctrl->stHead [N]. stZ. stNoCompo. dwVel
pGx3Ctrl->stHead [N]. stZ. stNoCompo. dwAcl
pGx3Ctrl->stHead [N]. stZ. stNoCompo. wDmpg
pGx3Ctrl->stHead [N]. stZ lOnePls
pHTEM [X]. dwVel
pHTEM [X]. dwAcl
pHTEM [X]. wDmpg
Maximum speed for operation other than θ axis
PTP
Acceleration for operation other than θ axis PTP
Damping waiting time for operation other than θ
axis PTP
Maximum speed of θ axis without parts
Acceleration of θ axis without parts
Damping waiting time of θ axis without parts
Internal data increase of θ axis per pulse of θ axis
N is head
number.
X is operation
type.
(*NOTE 6)
3 Head (Laser)
pGx3Ctrl->stHead [N]. stLas. lHoldoffCnt [X]
Laser hold off count
N is head
number.
X: (*NOTE 7)
pGx3Ctrl->stHead [N]. stLas. wWaitCalcT [X] Laser computation waiting time X: (*NOTE 8)
pGx3Ctrl->stHead [N]. stLas. lPreLoadAngle [X]
pGx3Ctrl->stHead [N]. stLas. lAlgoThresh [X]
Laser pre-load angle
Laser algorithm change threshold
X: (*NOTE 9)
- 34 -
(2) XY axes
No. Item Abbreviation Meaning
Meaning of
N, X, and Y
1 For XY axes PTP operation (High speed)
pGx3Ctrl->stXy. H [X]. byVel
pGx3Ctrl->stXy. H [X]. byAcl
pGx3Ctrl->stXy. H [X]. lStrk
pGx3Ctrl->stXy. H [X]. wPicDmpg [Y]
pGx3Ctrl->stXy. H [X]. wPlcDmpg [Y]
pGx3Ctrl->stXy. H [X]. wElseDmpg [Z]
pXH. byVel
pXH byAcl
pXH. lStrk
pXH. wPicDmpg [Y]
pXH. wPlcDmpg [Y]
pXH. wElseDmpg [Z]
Maximum speed
Acceleration
Stroke
Damping waiting time at pick position
Damping waiting time at mount position
Damping waiting time at other positions
X is strk
range.
(*NOTE 10)
Y is part
type. (*NOTE
11)
Z is moving
direction.
(*NOTE 12)
2 For XY axes PTP operation (Medium speed)
pGx3Ctrl->stXy. M [X]. byVel
pGx3Ctrl->stXy. M [X]. byAcl
pGx3Ctrl->stXy. M [X]. lStrk
pGx3Ctrl->stXy. M [X]. wPicDmpg [Y]
pGx3Ctrl->stXy. M [X]. wPlcDmpg [Y]
pGx3Ctrl->stXy. M [X]. wElseDmpg [Z]
pXM. byVel
pXM byAcl
pXM. lStrk
pXM. wPicDmpg [Y]
pXM. wPlcDmpg [Y]
pXM. wElseDmpg [Z]
Maximum speed
Acceleration
Stroke
Damping waiting time at pick position
Damping waiting time at mount position
Damping waiting time at other positions
X is strk
range.
(*NOTE 10)
Y is part
type. (*NOTE
11)
Z is moving
direction.
(*NOTE 12)
3 For XY axes PTP operation (Low speed)
pGx3Ctrl->stXy. L [X]. byVel
pGx3Ctrl->stXy. L [X]. byAcl
pGx3Ctrl->stXy. L [X]. lStrk
pGx3Ctrl->stXy. L [X]. wPicDmpg [Y]
pGx3Ctrl->stXy. L [X]. wPlcDmpg [Y]
pGx3Ctrl->stXy. L [X]. wElseDmpg [Z]
pXL. byVel
pXL byAcl
pXL. lStrk
pXL. wPicDmpg [Y]
pXL. wPlcDmpg [Y]
pXL. wElseDmpg [Z]
Maximum speed
Acceleration
Stroke
Damping waiting time at pick position
Damping waiting time at mount position
Damping waiting time at other positions
X is strk
range.
(*NOTE 10)
Y is part
type. (*NOTE
11)
Z is moving
direction.
(*NOTE 12)
4 For operation other than XY axes PTP operation
pGx3Ctrl->stXy. stEtcSp [X]. byVel
pGx3Ctrl->stXy. stEtcSp [X]. byAcl
pGx3Ctrl->stXy. stEtcSp [X]. wDmpg
Maximum speed
Acceleration
Stroke
X is
operation
type. (*NOTE
13)
5 For XY axes (Cover open)
pGx3Ctrl->stXy. stCover. byVel
pGx3Ctrl->stXy. stCover. byAcl
pGx3Ctrl->stXy. stCover. wDmpg
Maximum speed
Acceleration
Stroke