KE-750_MAINTE.pdf - 第130页
page), both the speed contro l and the positioning cont rol are controlled with the rotary encoder of the motor. T herefore, if there is a mechanical positioning offset in the dr ive system, it is difficult to accurately…
- 126 -
(5) When the XY axes move, the sensor head performs ③ magnet
detection (detects the magnetic material embedded every 40 µm) on
the magnescale, and moves. The ④ detection signal from the sensor
head is then multiplied by 4 at the magnescale detector (1 pulse = 10
µm), and the multiplied signal is fed back as ⑤ positioning pulse to
both the deviation counter of the AC servo driver and the counter of the
AC servo control board.
(6) The counter reading on the AC servo control board increases.
When the positioning pulse is input to the deviation counter of the AC
servo driver, the deviation counter performs a computation (Command
pulse minus positioning pulse). According to the counted value on the
deviation counter, the control circuit controls (positioning control) the
position of the XY axes. Therefore, when the XY axes approach the
target position which is 100 mm, the motor decelerates. When the XY
axes reach the position of 100 mm, the deviation counter value is set 0,
and the motor stops. Stop operation and acceleration/deceleration
operation differ depending on the gain setting of the AC servo driver.
So, an appropriate gain setting for the system shall be found and set.
When the (7) motor stops, the counter on the AC servo control board reads
100 mm/20 µm= 5000.
As described above, in the fully closed loop system, the speed control and
the positioning control are performed independently, and the position of the
XY axes is always detected with the magnescale, the axis can be stopped
accurately even if there is an over load or the belt becomes lose.
Using the fully closed loop system, a twin servo system of the Y axis can be
easily realized. In the twin servo system, two motors are simultaneously
driven. However, the characteristics of the servo driver and of the servo
motor are not the same between the YL axis and the YR axis. In addition,
the load conditions between the YL axis and the YR axis cannot be made
the same because of the difference in the position and installation of the
heads. Accordingly, there is a difference between the positions at the left
and the right even when the YL axis motor and the YR axis motor are
rotating.
In this case, in the fully closed loop system, the positions of the YL axis and
the YR axis are detected with the dedicated magnescale to each axis so
that an accurate positioning can be made.
On the other hand, in the semi-closed loop system (described on the next
page), both the speed control and the positioning control are controlled with
the rotary encoder of the motor. Therefore, if there is a mechanical
positioning offset in the drive system, it is difficult to accurately control the
left and right positioning.
To assure a high positioning accuracy (high resolution and accuracy), the
fully closed loop system is better. When a long ball screw is used in the
semi-closed loop system, the error among the lead pitches of the ball
screws shall be corrected for every machine. This correction value must
be stored as a parameter in the program, and this makes adjustment
troublesome.
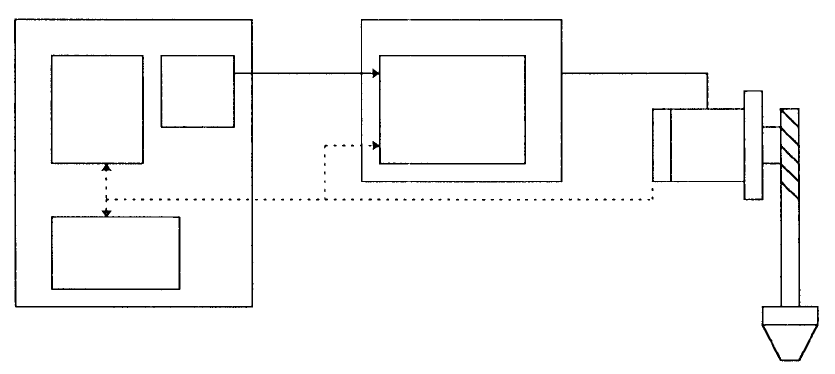
(2) Control system of Z/θ axes
For KE series, a semi-closed loop system is used to control the motor of the
Z/θ axes. The following explains the theory of operation.
Figure 6.2 shows the fully closed system for the Z axis. And, the example
shows that the Z axis is moved by +5 mm from the origin.
① + Command
voltage
Z/θ servo control board AC servo driver
Power for the U, V, W phase driver
Control
circuit
Control circuit
Speed control
Deviation
counter
Motor
LM628
② Speed detection and e position detection
Rotary encoder
Counter
(Stores the
current position.)
Figure 6.1 Semi-closed loop system
(1) The SUB CPU1 board of the control unit sets the data such as moving
distance, acceleration/deceleration, and maximum speed of the Z axis
to the Z/θ control board, and issues a start command.
(2) The motor controller IC, LM628, a dedicated IC for positioning control
and motor drive, and it has the deviation counter and the positioning
counter for the current position. However, the AC servo driver
dedicated to the speed control does not have the deviation counter for
positioning control. Therefore, the AC servo driver controls the speed,
and LM628 controls the position. The current position counter
- 127 -
- 128 -
memorizes the stop position at the start time but the deviation counter
reads 0.
(3) When LM628 analyzes the data above, and profile of the motor drive is
complete,① command voltage is gradually applied to the AC servo
driver. The AC servo driver then controls the rotation speed of the
motor according to the voltage being applied. (The range of the
command voltage is ±10 V.)
(4) The AC servo driver counts the number of pulses from the rotary
encoder (1 pulse = 10 µm), and detects (② speed detection) the
rotating speed of the motor. On the other hand, the counted pulse is
input to both the current position counter and the deviation counter
(DOWN side) of LM628. As a result, the reading of the current
position counter increases, and that of the deviation counter decreases.
(③ position detection)
(5) The deviation counter performs a computation, (command pulse) -
(position pulse), and when the Z axis approaches the target position
plus 5 mm, the command voltage goes near 0 V to decelerate the
motor. As a result, when the Z axis reaches at +5 mm position, the
deviation counter reads 0, and the command voltage is set 0 V to stop
the motor. The operation of stop and acceleration/deceleration may
largely change depending on the gain setting of the AC servo driver.
Therefore, an appropriate gain setting value must be found and set for
the system.
(6) When the motor stops, the absolute counter of LM628 reads the position
at the start plus 500.
As described above, in the semi-closed loop system, both the speed control
and the positioning control are performed together with the rotary encoder
directly coupled to the motor. Therefore, if there is a defect in the
mechanical system before the motor shaft (overload, loose screw, etc.), the
stop position of the ball screw may be offset even when the rotating position
of the motor is normal.