KE-750_MAINTE.pdf - 第107页
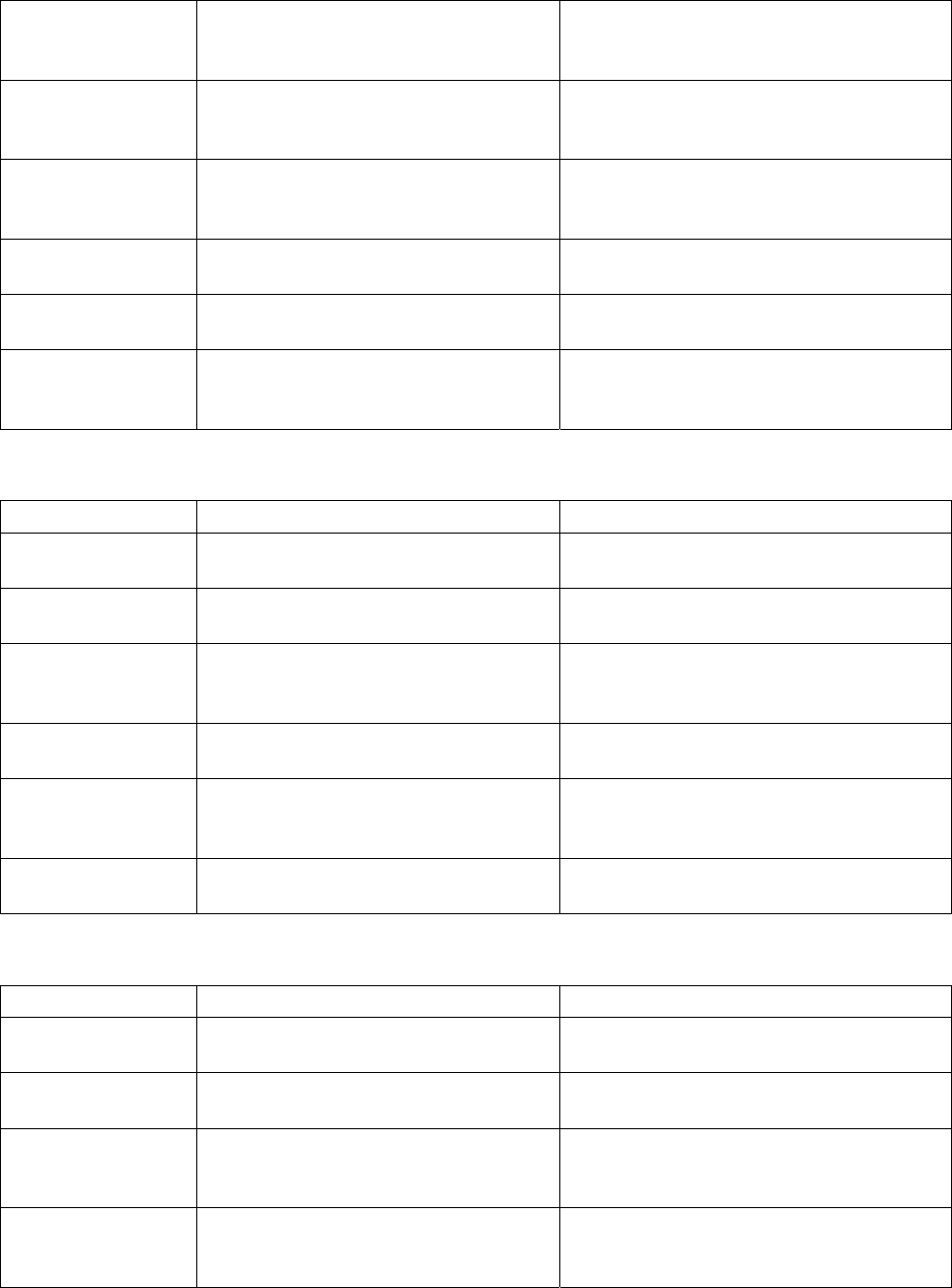
- 104 - 94 No Cutoff 1 Ditto Ditto 95 No Cutoff 2 Ditto Ditto 96 Constant Angle Ditto Ditto 101 Page Mismatch Spare. Consult CyberOptics. Ditto Other errors Error code Cause of error Action 07 No Algorithm NO_ALG has bee…
- 103 -
11
SCM Error
A hardware error whose cause cannot
be specified but related to the CPU
board of the SCM.
Ditto
13
Bad EEPROM
Data
SCM EEPROM reports a data error. If the error occurs again when the power
is turned off and on, it shall be replaced.
14
Bad EEPROM
Sync
Ditto Ditto
83
Bad Checksum
A software error has been detected
when reading the data in EEPROM.
Ditto
84
Duplicate Start
Ditto Ditto
85
No EEPROM Start
of Data
Ditto Ditto
Hardware replacement error
Error code Cause of error Action
02
Laser Fail
The laser diode is faulty. The sensor has to be replaced.
09
FIFO Error
The hardware of the SCM is faulty. The SCM board has to be replaced.
12
Bad EEPROM
Version
The software does not recognize the
EEPROM version of the SCM.
The ROM of the SCM board has to be
replaced.
103
Low Background
The amount of laser beam is too small
for image check.
The sensor has to be replaced.
104
Bad Image Check
Region
The boundary of the image check
range has not been correctly set.
The sensor has to be replaced.
105
Image Check Fail
Image check failed the parameter
comparison.
The sensor has to be replaced.
Software fault error
Error code Cause of error Action
70
Algorithm Error
Impossible status of firmware has
been detected.
Consult JUKI (Developer).
90
Too Few Frames
The software is faulty. Consult
CyberOptics.
Ditto
91
Minimum Out of
Range 1
Ditto Ditto
92
Minimum Out of
Range 2
Ditto Ditto
- 104 -
94
No Cutoff 1
Ditto Ditto
95
No Cutoff 2
Ditto Ditto
96
Constant Angle
Ditto Ditto
101
Page Mismatch
Spare. Consult CyberOptics. Ditto
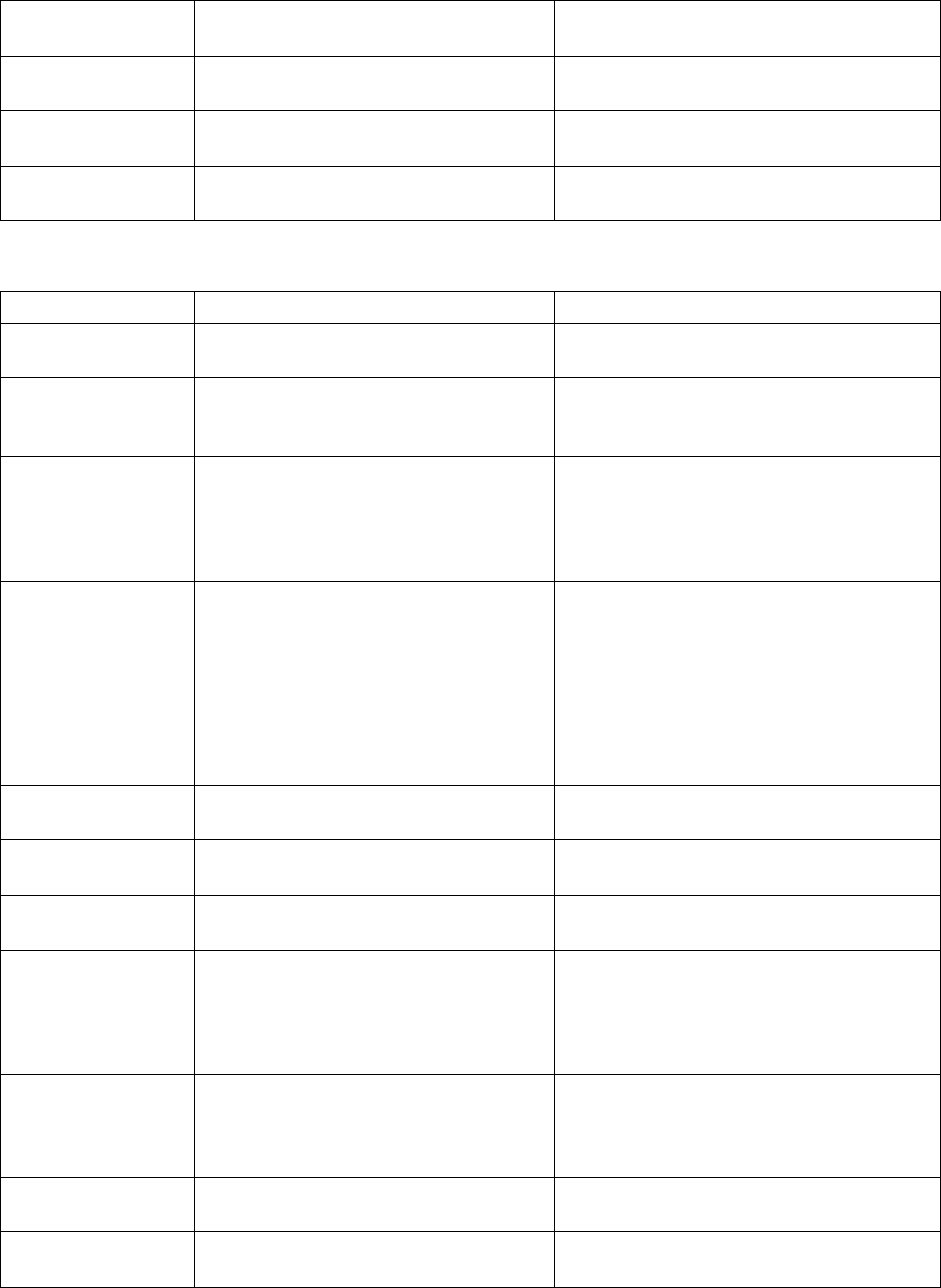
Other errors
Error code Cause of error Action
07
No Algorithm
NO_ALG has been requested. Consult JUKI (Developer).
69
DPRAM
An error of Dual Port RAM. This is
impossible to happen because that
RAM is not used.
Ditto
72
More Pages
A
n error related to Window command.
This can occur when Window 1 has
been specified with SCM2. This is
impossible to happen because only
Window 0 is used.
Ditto
73
More Counters
This error can occur when encoder
No.1 has been specified with SCM2.
This is impossible to happen because
only encoder No.0 is available.
Ditto
74
More Windows
This error can occur when Window
No.1 has been specified with SCM2.
This is impossible to happen because
only Window No.0 is available.
Ditto
75
Previous Error
An error has occurred with the
previous algorithm.
Ditto
78
Small Window
The window size has been for set less
than 8 pixels.
Ditto
86
Bad Parameter
An invalid parameter has been set. Ditto
87
Bad Data
Invalid data has been detected. It is
necessary to check whether a valid
data has been included in the
program sequence or a command
error has occurred.
Ditto
93
Minimum Too High
The change in the curve to the angle
is too small. This is likely to occur
when a small part is turned at low
speed.
Ditto
100
Units Not Set
Required initialization has not been
performed yet.
Ditto
102
Invalid Algorithm
A invalid algorithm has been sent. Ditto
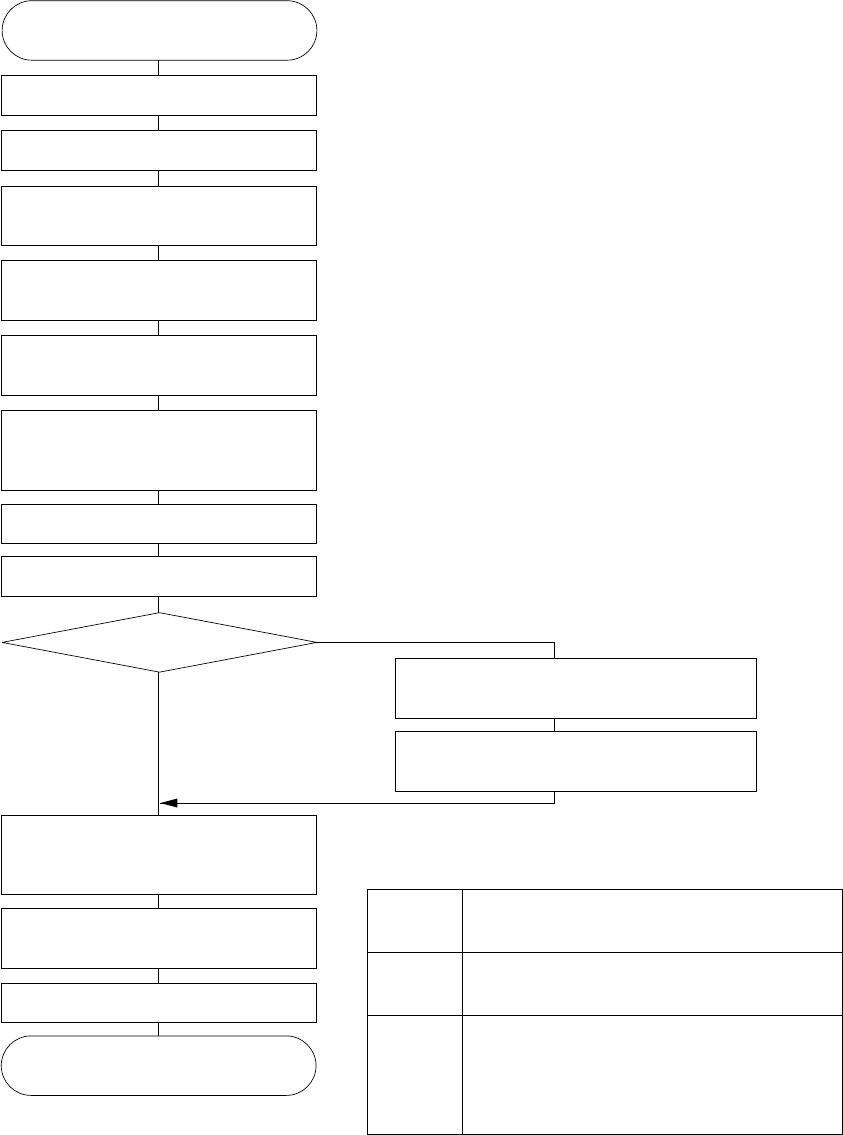
3.11 Part Recognition Process
Part recognition using the VCS is performed as shown below:
START
Recognition result, received?
Sends the switch command to the
VCS camera for recognition
Moves the X-Y, Z, and θ axes to the
part recognition unit.
Completes component pick.
Turns on the VCS light.
Sends the part recognition command
to the part recognition unit.
Completes the direct interruption from
the part recognition unit, and waiting
communication reception.
Turns off the VCS light.
Other operations
Obtains the mount coordinate with
which part recognition correction has
been completed.
Moves the X-Y, and θ axes to the
mount coordinate.
Performs mounting.
Moves the X-Y, and θ axes to the coordinate
before part recognition correction.
Waits the result of recognition from the
recognition unit.
End
NO
YES
*1
*2
*1: The coordinates of the axes when part recognition are
as follows:
*2: No action is expected in many cases where mounting is
performed in sequence with the general head which
performs pick and mount with the IC dedicated.
X-Y axes
Z axis
θ axis
The rotating center of the IC head is placed at
the recognition center for the VCS camera.
At the bottom end of the nozzle, and (10 mm
+ part height) from the board surface.
The most nearest direction of the part when
mounted from 0, 90, 180, or 270 degree with
respect to the direction where the direction of
the picked part matches the Y axis direction
of the VCS camera's image.
- 105 -