KE-750_MAINTE.pdf - 第111页
which is the mount coordi nate of the mount data. In this case, if it is assumed that the board is moved and deformed evenly, obtain the coordinate of the rectangl e coordinate which has origin ( ○ )of point P' on t…
- For the BOC recognition per circuit
From circuit No.1, in the same manner as for the BOC recognition per board,
BOC mark recognition is performed per circuit. When recognition of all BOC
marks on the circuit is complete, BOC recognition process of the next circuit is
performed in ascending order of the circuit numbers.
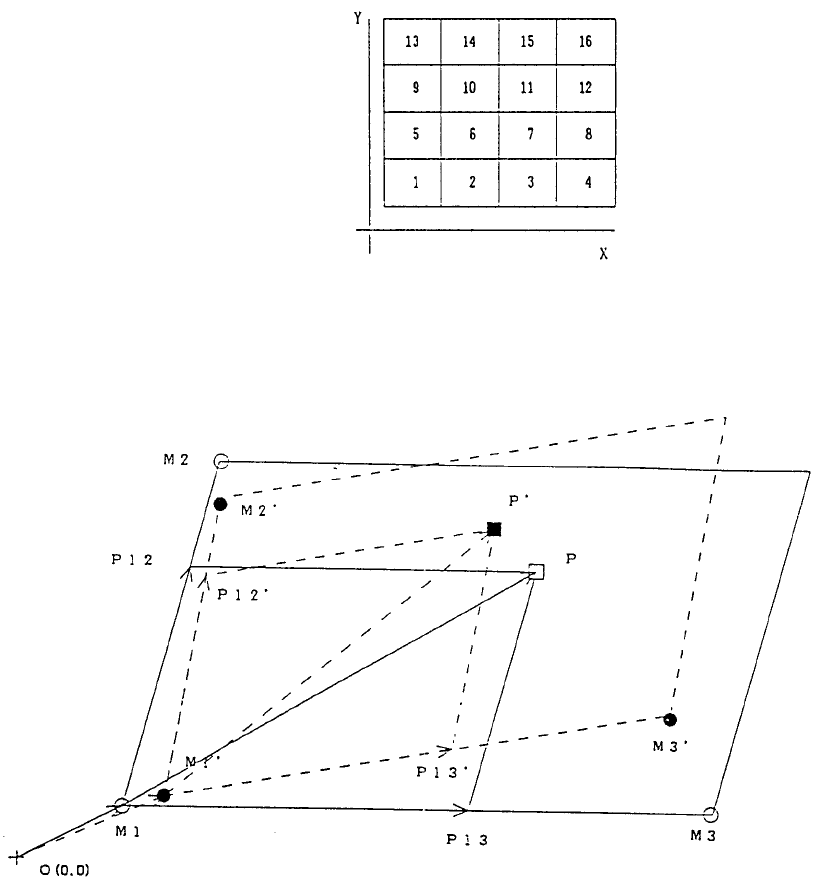
The circuit numbers for non-matrix split boards, the order of the number is the
one for the circuit location input from the board data input.
The circuit numbers for matrix split boards, it is to be counted in an increasing
order of the X axis at the side of the circuit close to the machine origin of the X
axis. This is repeated in increasing order of the Y axis from the machine origin
side of the Y axis. For 4 by 4 matrix split boards, the circuit numbers are as
shown below.
Fiducial mark correction algorithm
In case of 3-point BOC mark
When points M1, M2, and M3 shown as (○) in the figure above are the BOC
mark coordinates in the board data, and when the actual coordinates obtained
by the recognition of each point are M1', M2', and M3' shown as (●), obtain
point P' (■) which is the actual mount coordinate with respect to point P (□)
- 107 -

which is the mount coordinate of the mount data.
In this case, if it is assumed that the board is moved and deformed evenly,
obtain the coordinate of the rectangle coordinate which has origin (○)of point P'
on the angular coordinate made with M1', M2', and M3' with response to M1,
M2, and M3 which are equivalent to the coordinate of point P on the angular
coordinate which has two coordinate axes out of the straight lines which pass
two points out of three points, M1, M2, and M3.
In this case, a point of intersection of the two straight lines; one is drawn from P
in parallel with the angular coordinate axis and the other drawn from M1 to M2
is defined as P12, and another point of intersection of the two straight lines: one
is also drawn from P in parallel with the angular coordinate axis and the other
drawn from M1 to M3 is defined as P13. In the same manner, for P', a point of
intersection made by the straight line from M1' to M2' is defined as P12' and
made by the straight line from M1' to M3' is defined as P13'. Then, the
equations below can be obtained.
(M1→P) = (M1→P13) + (M1→P12) ①
(M1’→P’) = (M1’→P13’) + (M1’→P12’) ②
According to the definition of P', the following equations can be obtained.
|M1→P12|
|M1→M2|
|M1'→P12'|
|M1'→M2'|
=
|M1→P13|
|M1→M3|
|M1'→P13'|
|M1'→M3'|
=
Equations q and w can be as shown below when the result of equation e is A,
and that of equation r is B.
(M1→P) = B (M1→M13) + A (M1→M2) ⑤
(M1’→P’) = B (M1’→M3’) + A (M1’→M2’) ⑥
In the equations ⑤ and ⑥ on the previous page, vector coordinates M1, M2,
M3, P, M1', M2', M3', and P' on the rectangle coordinate whose origin is (
○) are
defined (x1, y1), (x2, y2), (x3, y3), (xp, yp), (x1', y1'), (x2', y2'), (x3', y3'), and (X,
Y), respectively. Then, the following equations can be obtained.
(xp, yp) - (x1, y1) = B ((x3, y3) - (x1, y1)) + A ((x2, y2) - (x1, y1))
(X, Y) - (x1’, Y1’) = B ((x3’, y3’) - (x1’, y1’)) + A ((x2’, y2’) - (x1, y1’))
- 108 -
When these equations are concluded in relation to the X axis and the Y axis,
the following four simultaneous equations can be obtained.
xp - x1 = B (x3 - x1) + A (x2 - x1) ⑦
yp - y1 = B (y3 - y1) + A (y2 - y1) ⑧
X - x1’ = B (x3’ - x1’) + A (x2’ - x1’) ⑨
Y - y1’ = B (y3’ - y1’) + A (y2’ - y1’) ⑩
In this case, the values of the functions other than A, B, X, and Y are known.
Therefore, vector coordinate (X, Y) of P' where the origin is (K) can be obtained
from the answer of these simultaneous equations.
According to equations u and i, the following equations can be obtained.
xp - x1 - B (x3 - x1)
x2 - x1
yp - y1 - B (y3 - y1)
y2 - y1
=A =
xp - x1 - A (x2 - x1)
x3 - x1
yp - y1 - A (y2 - y1)
y3 - y1
=B =
When B and A are obtained from equations !1 and !2, the following equations
can be obtained.
(yp - y1) (x2 - x1) - (xp - x1) (y2 - y1)
(y3 - y1) (x2 - x1) - (x3 - x1) (y2 - y1)
B =
(yp - y1) (x3 - x1) - (xp - x1) (y3 - y1)
(y2 - y1) (x3 - x1) - (x2 - x1) (y3 - y1)
A =
When answers A and B in the above equations are substituted for equations ⑨
and ⑩, X and Y can be obtained easily. In equations ⑬ and ⑭, if the
denominator is 0, A and B become infinite. In this case, in both equations, the
following equation is true.
(y3 -y1) (x2 - x1) = (x3 -x1) (y2 - y1)
When both sides are divided by (x2 - x1) (x3 - x1), the following equation can be
obtained.
(y3 - y1)
(x3 - x1)
(y2 - y1)
(x2 - x1)
=
This means that M1, M2, and M3 are inline on a straight line. In this case, the
result is regardless as a data error because it is meaningless for the BOC mark
to be three points.
- 109 -