上银直线导轨.pdf - 第8页
表格 2 負荷係數 1-4-5 壽 命 時 間 的換 算 依使用速度及頻率將壽命距離換算成壽命時間。 負 荷 狀況 使用速度 f w 無衝擊 力且 平滑 V ≦ 1 5 m/mi n 1 ~ 1 .2 微小衝擊 力 1 5 m/ min < V ≦ 60 m/min 1 .2 ~ 1 .5 普通負荷 力 60m/min < V ≦ 120 m/ min 1 .5 ~ 2.0 受衝擊 力及振動 V > 1 20 m/ min 2.0 ~ …
1-4 直線導軌壽命
1-4-1 壽命
當直線導軌承受負荷並作運動時,珠道表面與鋼珠因不斷地受到循環應力的作用,一但到達滾動疲勞的臨界值,
接觸面就會開始產生疲勞破損,並在部份表面發生魚鱗狀薄片的剝落現象,此種現象叫做表面剝離。壽命的定義
即為珠道表面及鋼珠因材料疲勞而產生表面剝離時為止的總運行距離。
1-4-2 額定壽命
直線導軌的壽命,具有很大的分散性,即使同一批製造的產品,在相同的運動狀態下使用,壽命也會所有不同;
這大多歸咎於材料本身在疲勞特性上固有的變化。因此為定義直線導軌的壽命,一般以額定壽命為基準;其定義
是:以一批同樣的產品,逐個在相同的條件及額定負荷下運行,其中90%未曾發生表面剝離現象而能達到的總運
行距離。
1-4-3 壽命的計算
直線導軌的壽命會因實際承受工作負荷而不同,可依選用之直線導軌的基本動額定負荷及工作負荷推算出使用壽
命。
(1) 不考慮環境因素影響,壽命計算如下所示。
(2) 若考
慮直線導軌使用的環境因素,其壽命會隨運動的狀態、珠道表面硬度及系統溫度而有所變化。
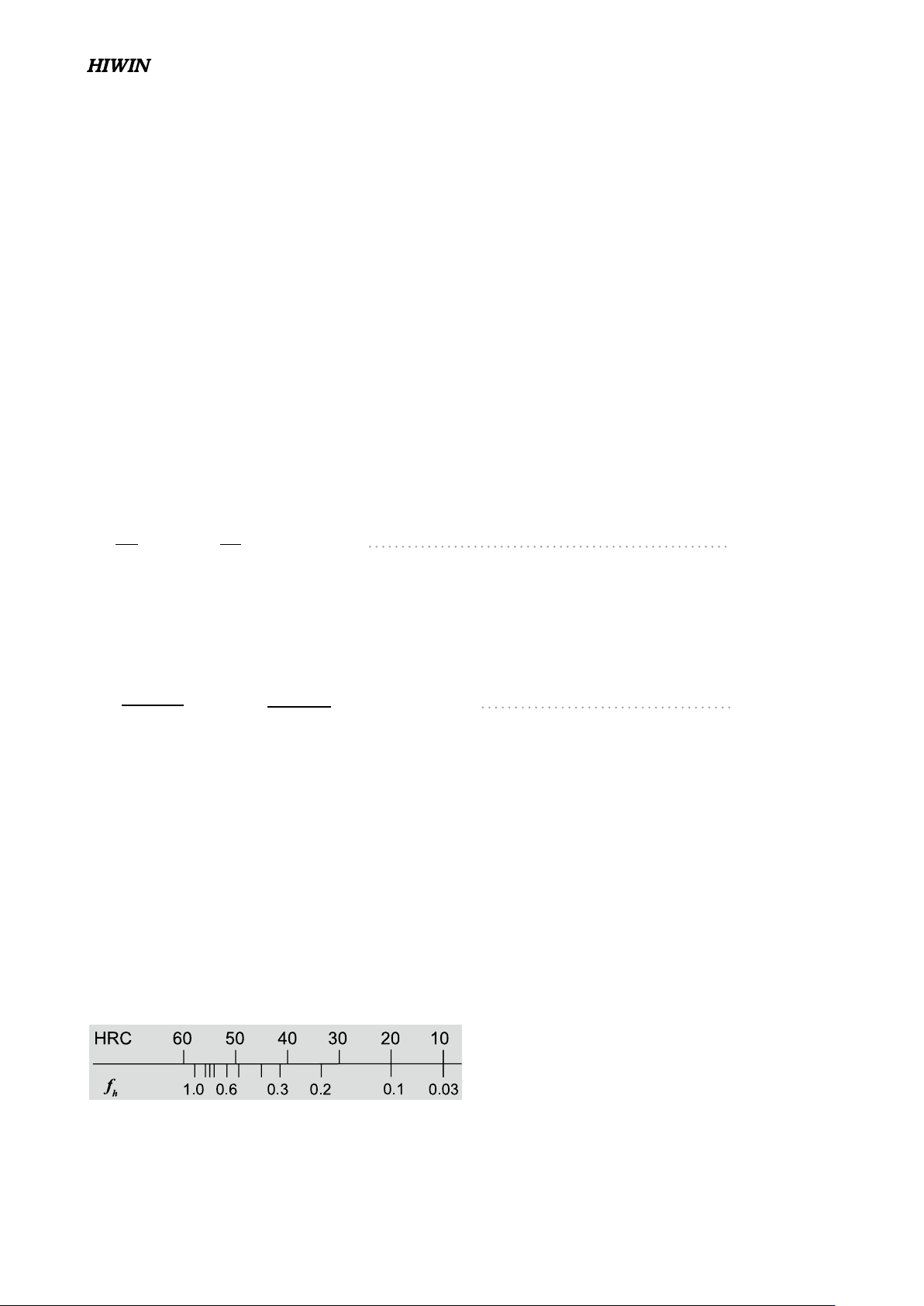
1-4-4 壽命係數
(1) 硬度係數 ( f
h
)
直線導軌的珠道接觸表面硬度要求在一定的硬化深度之硬度為HRC 58~62,倘若硬度值無法達到要求的水準,將
會降低直線導軌的額定負荷及使用壽命,此時動、靜額定負荷為尺寸表列值再乘以對應的硬度係數。HIWIN 出廠
之直線導軌硬度要求皆為HRC 58以上,故 f
h
為1。
L=
3 3
C
P
•
50km=
•
31mile
C
P
(
( )
)
Eq.1.2
L : 額定壽命
C : 基本動額定負荷
P : 工作負荷
L
:
壽命
f
h
:
硬度係數
C
:
基本動額定負荷
f
t
:
溫度係數
P
C
:
工作負荷
f
W
:
負荷係數
Raceway hardness
Eq.1.3
L=
3 3
f
h
•
f
t
•
C
f
w
•
P
c
f
h
•
f
t
•
C
f
w
•
P
c
•
50km=
•
31mile
(
( )
)
G99TS03-1803
4
表格2 負荷係數
1-4-5
壽命時間的換算
依使用速度及頻率將壽命距離換算成壽命時間。
負荷狀況 使用速度 f
w
無衝擊力且平滑
V≦15 m/min
1 ~ 1.2
微小衝擊力 15 m/min <V≦60 m/min 1.2 ~ 1.5
普通負荷力 60m/min< V≦ 120 m/min 1.5 ~ 2.0
受衝擊力及振動 V >120 m/min 2.0 ~ 3.5
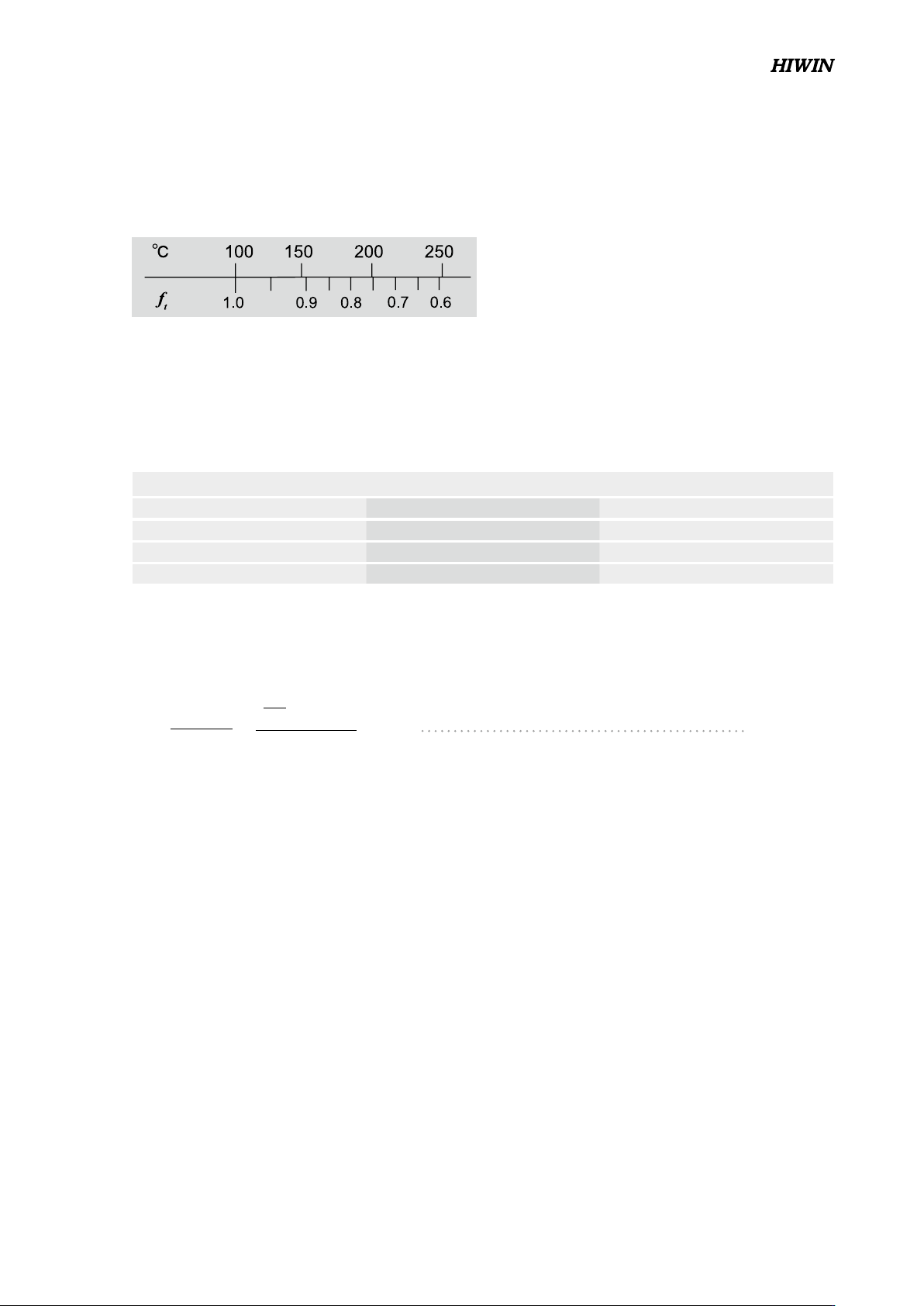
(2)
溫度係數
( f
t
)
系統溫度會對直線導軌的材質有影響,當溫度高於100
o
C
時直線導軌的額定負荷及使用壽命將會降低,此時動、
靜額定負荷為尺寸表列值再乘以對應的溫度係數。由於有些配件是塑膠材質較不耐高溫,故建議使用溫度應低於
100
o
C
。
(3)
負荷係數
(f
w
)
作用於直線導軌的負荷,除裝置本身自重、起動停止時的慣性負荷及因懸置而產生的力距負荷外,還有因運動伴隨
而來的振動及衝擊負荷,此種型式的負荷並不容易算出,根據經驗依負荷狀況及使用速度,建議將計算負荷值再乘
以對應的負荷係數。
Temperature
Eq.1.4
L
h
=
3
L
•
10
V
e
•
60
V
e
•
60
=
hr
3
3
C
P
•
50
•
10
( )
L
h
:
壽命時間
(hr)
L
:
壽命
(km)
V
e
:
運行速率
(m/min)
C/P :
負荷比
1-5 工作負荷
1-5-1 工作負荷計算
工作負荷的計算方式會隨實際受力分佈的情形而產生變化,例如承載物體本身重心的位置、施力的位置,以及運
行時起動、停止的加速度慣性力等皆對負荷的計算發生影響,因此使用直線導軌時必須仔細考慮各種負荷狀況,
以計算出最正確的負荷值。
G99TS03-1803
5
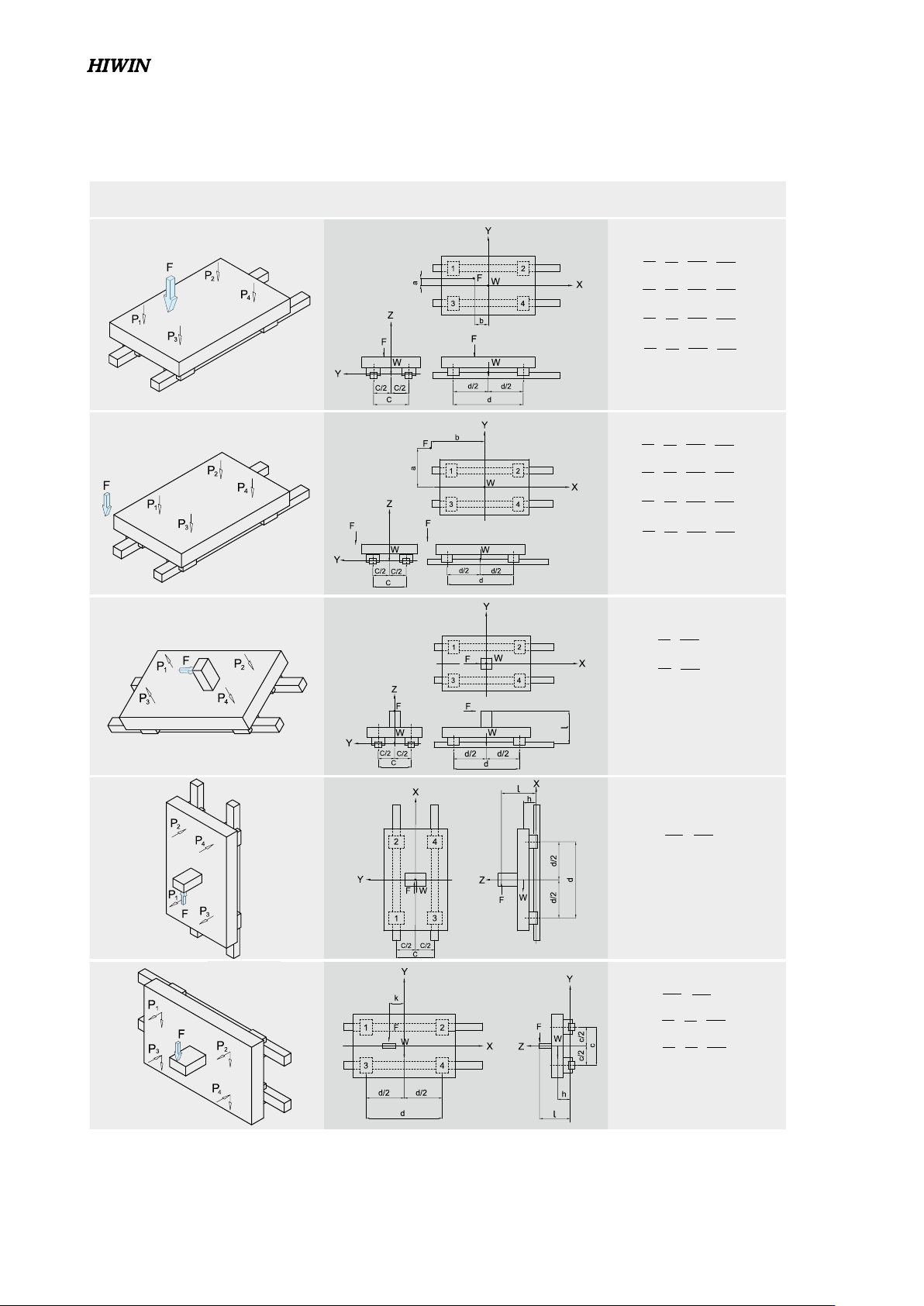
直線導軌配置圖 受力分佈圖 單個滑塊負荷
(1) 單個滑塊承受負荷
t1
P
P
t3
P
t4
P
t2
表格3 負荷計算例
P
t1
=P
t3
=
4
+
+
W
4
F
2d
F
•
k
P
t2
=P
t4
=
4
+
-
W
4
F
2d
F
•
k
P
3
= P
1
=
4
-
W
2d
F
•
l
P
4
= P
2
=
4
+
W
2d
F
•
l
P
4
=- P
1
~
2d
+
W
•
h
2d
F
•
l
P
4
=- P
1
~
2c
-
W
•
h
2c
F
•
l
P
1
=
4
+
+
+
W
4
F
2c
F
•
a
2d
F
•
b
P
2
=
4
+
+
-
W
4
F
2c
F
•
a
2d
F
•
b
P
3
=
4
+
-
+
W
4
F
2c
F
•
a
2d
F
•
b
P
4
=
4
+
-
-
W
4
F
2c
F
•
a
2d
F
•
b
P
t1
=P
t3
=
4
+
+
W
4
F
2d
F
•
k
P
t2
=P
t4
=
4
+
-
W
4
F
2d
F
•
k
P
3
= P
1
=
4
-
W
2d
F
•
l
P
4
= P
2
=
4
+
W
2d
F
•
l
P
4
=- P
1
~
2d
+
W
•
h
2d
F
•
l
P
4
=- P
1
~
2c
-
W
•
h
2c
F
•
l
P
1
=
4
+
+
+
W
4
F
2c
F
•
a
2d
F
•
b
P
2
=
4
+
+
-
W
4
F
2c
F
•
a
2d
F
•
b
P
3
=
4
+
-
+
W
4
F
2c
F
•
a
2d
F
•
b
P
4
=
4
+
-
-
W
4
F
2c
F
•
a
2d
F
•
b
P
t1
=P
t3
=
4
+
+
W
4
F
2d
F
•
k
P
t2
=P
t4
=
4
+
-
W
4
F
2d
F
•
k
P
3
= P
1
=
4
-
W
2d
F
•
l
P
4
= P
2
=
4
+
W
2d
F
•
l
P
4
=- P
1
~
2d
+
W
•
h
2d
F
•
l
P
4
=- P
1
~
2c
-
W
•
h
2c
F
•
l
P
1
=
4
+
+
+
W
4
F
2c
F
•
a
2d
F
•
b
P
2
=
4
+
+
-
W
4
F
2c
F
•
a
2d
F
•
b
P
3
=
4
+
-
+
W
4
F
2c
F
•
a
2d
F
•
b
P
4
=
4
+
-
-
W
4
F
2c
F
•
a
2d
F
•
b
P
t1
=P
t3
=
4
+
+
W
4
F
2d
F
•
k
P
t2
=P
t4
=
4
+
-
W
4
F
2d
F
•
k
P
3
= P
1
=
4
-
W
2d
F
•
l
P
4
= P
2
=
4
+
W
2d
F
•
l
P
4
=- P
1
~
2d
+
W
•
h
2d
F
•
l
P
4
=- P
1
~
2c
-
W
•
h
2c
F
•
l
P
1
=
4
+
+
+
W
4
F
2c
F
•
a
2d
F
•
b
P
2
=
4
+
+
-
W
4
F
2c
F
•
a
2d
F
•
b
P
3
=
4
+
-
+
W
4
F
2c
F
•
a
2d
F
•
b
P
4
=
4
+
-
-
W
4
F
2c
F
•
a
2d
F
•
b
P
t1
=P
t3
=
4
+
+
W
4
F
2d
F
•
k
P
t2
=P
t4
=
4
+
-
W
4
F
2d
F
•
k
P
3
= P
1
=
4
-
W
2d
F
•
l
P
4
= P
2
=
4
+
W
2d
F
•
l
P
4
=- P
1
~
2d
+
W
•
h
2d
F
•
l
P
4
=- P
1
~
2c
-
W
•
h
2c
F
•
l
P
1
=
4
+
+
+
W
4
F
2c
F
•
a
2d
F
•
b
P
2
=
4
+
+
-
W
4
F
2c
F
•
a
2d
F
•
b
P
3
=
4
+
-
+
W
4
F
2c
F
•
a
2d
F
•
b
P
4
=
4
+
-
-
W
4
F
2c
F
•
a
2d
F
•
b
註: W: 重量 P
n
: 負荷(滑塊徑向,反徑向) n=1~4
F: 外力 Ptn: 負荷(滑塊側向) n=1~4
a, b, k: 外力至幾何中心之距離
c: 導軌跨距 d: 滑塊跨距
l : 外力至驅動源之距離
h: 重心至驅動源之距離
G99TS03-1803
6