1OPERATION_.pdf - 第139页
Fig . 3.4 • Refer to “ 2.18 . 2 Repetitive Placement Data ( when P . E . C . recognition function is not implemented on each repetitive pattern ) ’ ’ and “ 2.18 . 3 Repetitive Placement Data ( when P . E . C recognition …
3.1
P
.
E
.
C
.
Recognition
Function
3.1
P
.
E
.
C
.
Recognition
Function
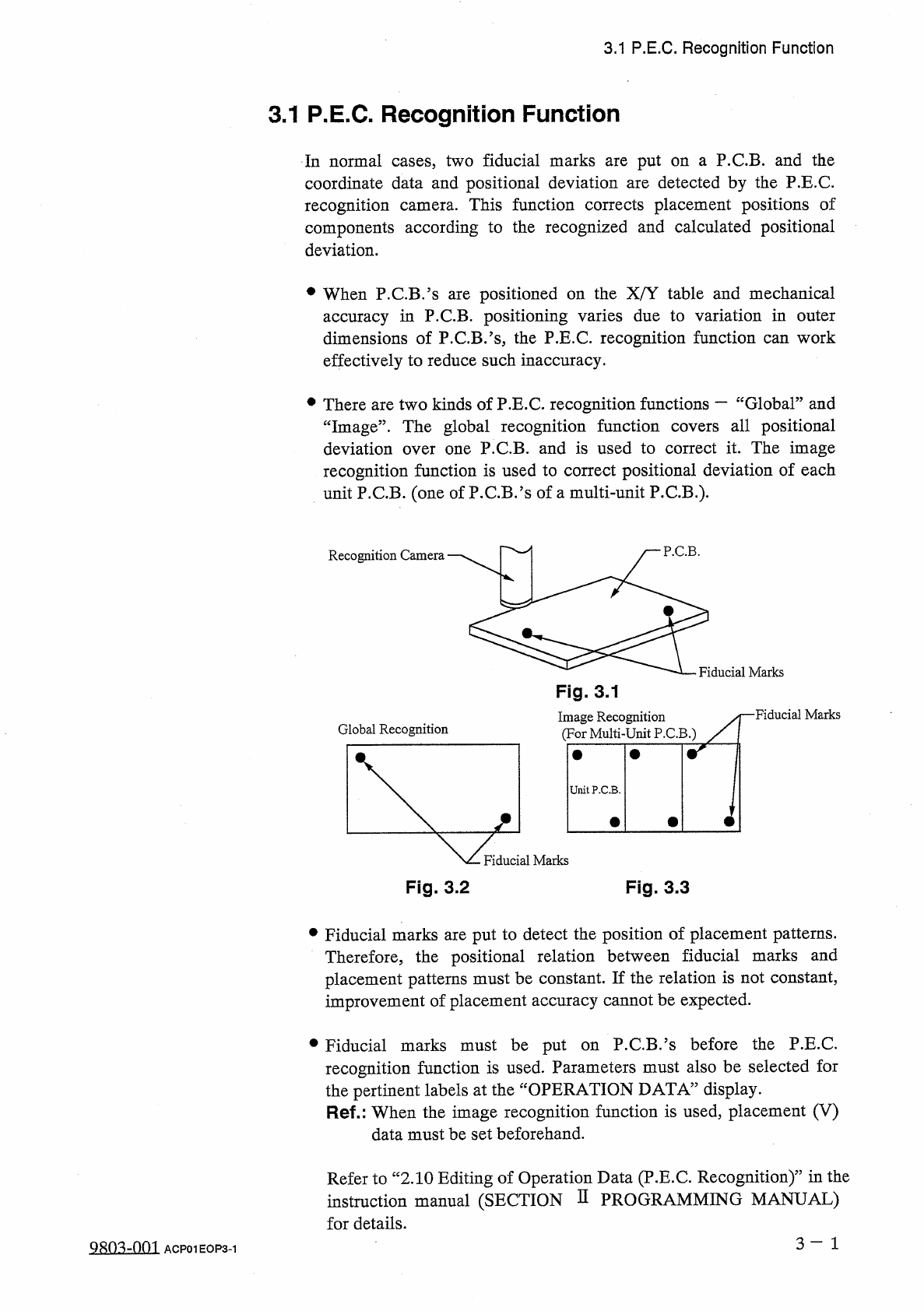
In
normal
cases
,
two
fiducial
marks
are
put
on
a
P
.
C
.
B
.
and
the
coordinate
data
and
positional
deviation
are
detected
by
the
P
.
E
.
C
.
recognition
camera
.
This
function
corrects
placement
positions
of
components
according
to
the
recognized
and
calculated
positional
deviation
.
•
When
P
.
C
.
B
.
’
s
are
positioned
on
the
X
/
Y
table
and
mechanical
accuracy
in
P
.
C
.
B
.
positioning
varies
due
to
variation
in
outer
dimensions
of
P
.
C
.
B
.
’
s
,
the
P
.
E
.
C
.
recognition
function
can
work
effectively
to
reduce
such
inaccuracy
.
•
There
are
two
kinds
of
P
.
E
.
C
.
recognition
functions
—
“
Global
”
and
all
positional
“
Image
”
.
The
global
recognition
function
deviation
over
one
P
.
C
.
B
.
and
is
used
to
correct
it
.
The
image
recognition
function
is
used
to
correct
positional
deviation
of
each
unit
P
.
C
.
B
.
(
one
of
P
.
C
.
B
.
’
s
of
a
multi
-
unit
P
.
C
.
B
.
)
.
covers
P
.
C
.
B
.
Recognition
Camera
Fiducial
Marks
Fig
.
3.1
■
Fiducial
Marks
Image
Recognition
(
For
Multi
-
Unit
P
.
C
.
B
.
)
Global
Recognition
UnitP
.
C
.
B
.
Fiducial
Marks
Fig
.
3.2
Fig
.
3.3
•
Fiducial
marks
are
put
to
detect
the
position
of
placement
patterns
.
Therefore
,
the
positional
relation
between
fiducial
marks
and
placement
patterns
must
be
constant
.
If
the
relation
is
not
constant
,
improvement
of
placement
accuracy
cannot
be
expected
.
P
.
C
.
B
,
’
s
before
the
P
.
E
.
C
.
•
Fiducial
marks
must
be
put
recognition
function
is
used
.
Parameters
must
also
be
selected
for
the
pertinent
labels
at
the
Ref
.
:
When
the
image
recognition
function
is
used
,
placement
(
V
)
on
display
.
OPERATION
DATA
”
data
must
be
set
beforehand
.
Refer
to
“
2.10
Editing
of
Operation
Data
(
P
.
E
.
C
.
Recognition
)
'
5
in
the
instruction
manual
(
SECTION
D
PROGRAMMING
MANUAL
)
for
details
.
3
-
1
QRO
^
-
001
ACP
01
EOP
3
-
1
Fig
.
3.4
•
Refer
to
“
2.18
.
2
Repetitive
Placement
Data
(
when
P
.
E
.
C
.
recognition
function
is
not
implemented
on
each
repetitive
pattern
)
’
’
and
“
2.18
.
3
Repetitive
Placement
Data
(
when
P
.
E
.
C
recognition
function
is
implemented
instruction
manual
(
SECTION
H
PROGRAMMING
MANUAL
)
for
detailed
information
on
how
to
create
pattern
program
data
in
which
the
equivalent
repetitive
pattern
function
can
be
used
.
each
repetitive
pattern
)
”
in
the
on
3
一
2
QRO
^
-
001
ACP
01
EOP
3
-
2
3.2
Equivalent
Repetitive
Pattern
Function
3.2
Equivalent
Repetitive
Pattern
Function
Pattern
program
data
for
unit
P
.
C
.
B
.
’
s
(
same
repetitive
patterns
)
can
easily
be
created
through
a
combination
of
coordinate
data
of
repetitive
placement
patterns
and
each
placement
pattern
origin
.
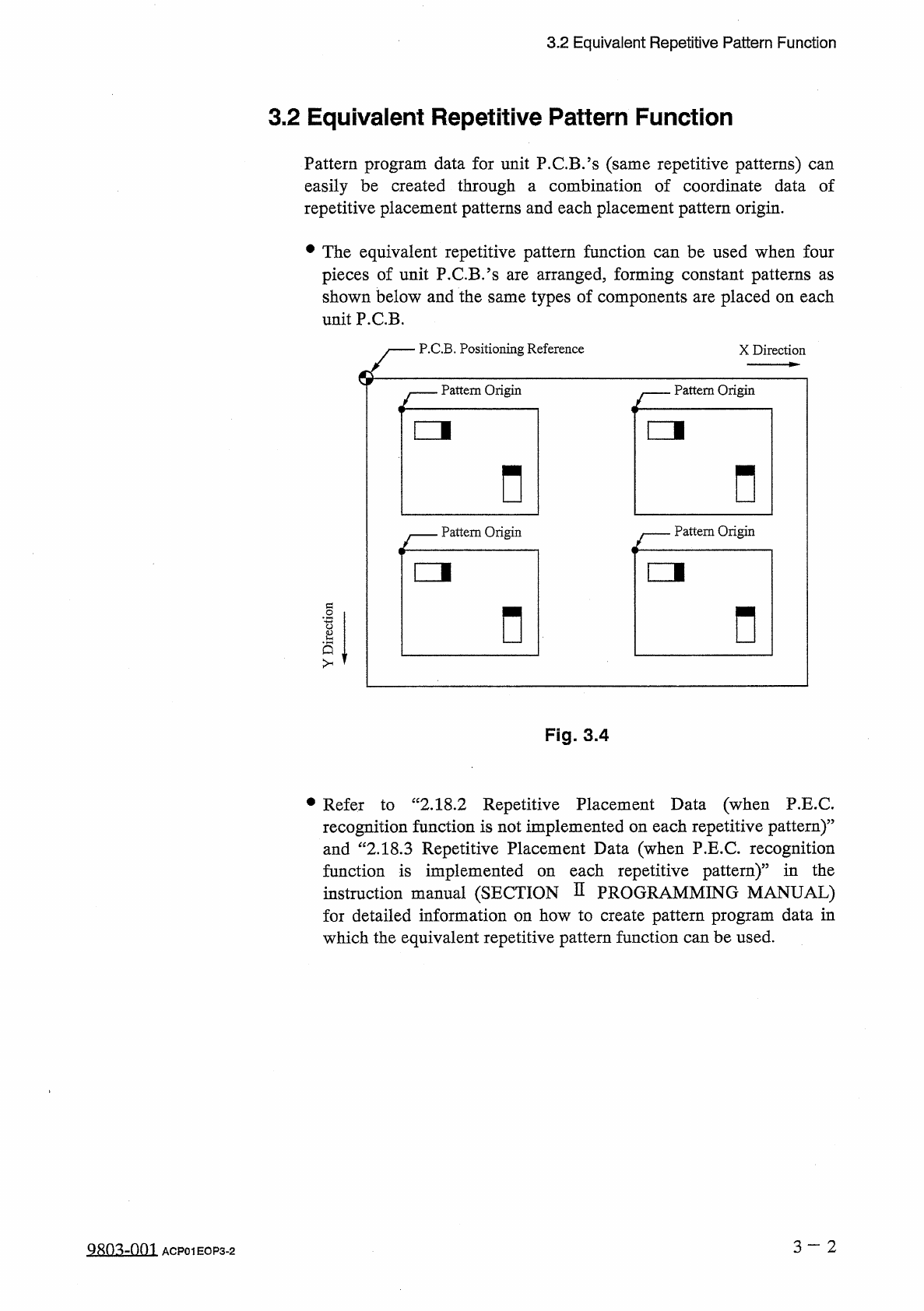
•
The
equivalent
repetitive
pattern
function
can
be
used
when
four
pieces
of
unit
P
.
C
.
B
.
'
s
are
arranged
,
forming
constant
patterns
as
shown
below
and
the
same
types
of
components
are
placed
on
each
unit
P
.
C
.
B
.
P
.
C
.
B
.
Positioning
Reference
X
Direction
Pattern
Origin
Pattern
Origin
CU
a
n
n
Pattern
Origin
Pattern
Origin
a
□
i
n
n
uola
A
3.3
Differential
Repetitive
Pattern
Function
for
Mixed
Programs
3.3
Differential
Repetitive
Pattern
Function
for
Mixed
Programs
By
creating
several
placement
data
in
one
pattern
program
data
,
components
for
different
patterns
can
easily
be
placed
on
unit
P
.
C
.
B
/
s
of
a
multi
-
unit
P
.
C
.
B
.
•
Because
several
placement
data
can
be
set
in
one
pattern
program
,
the
related
operation
and
component
data
can
be
used
commonly
.
•
Each
placement
data
pattern
,
making
it
possible
efficiently
.
be
set
independently
for
a
repetitive
create
pattern
program
data
can
to
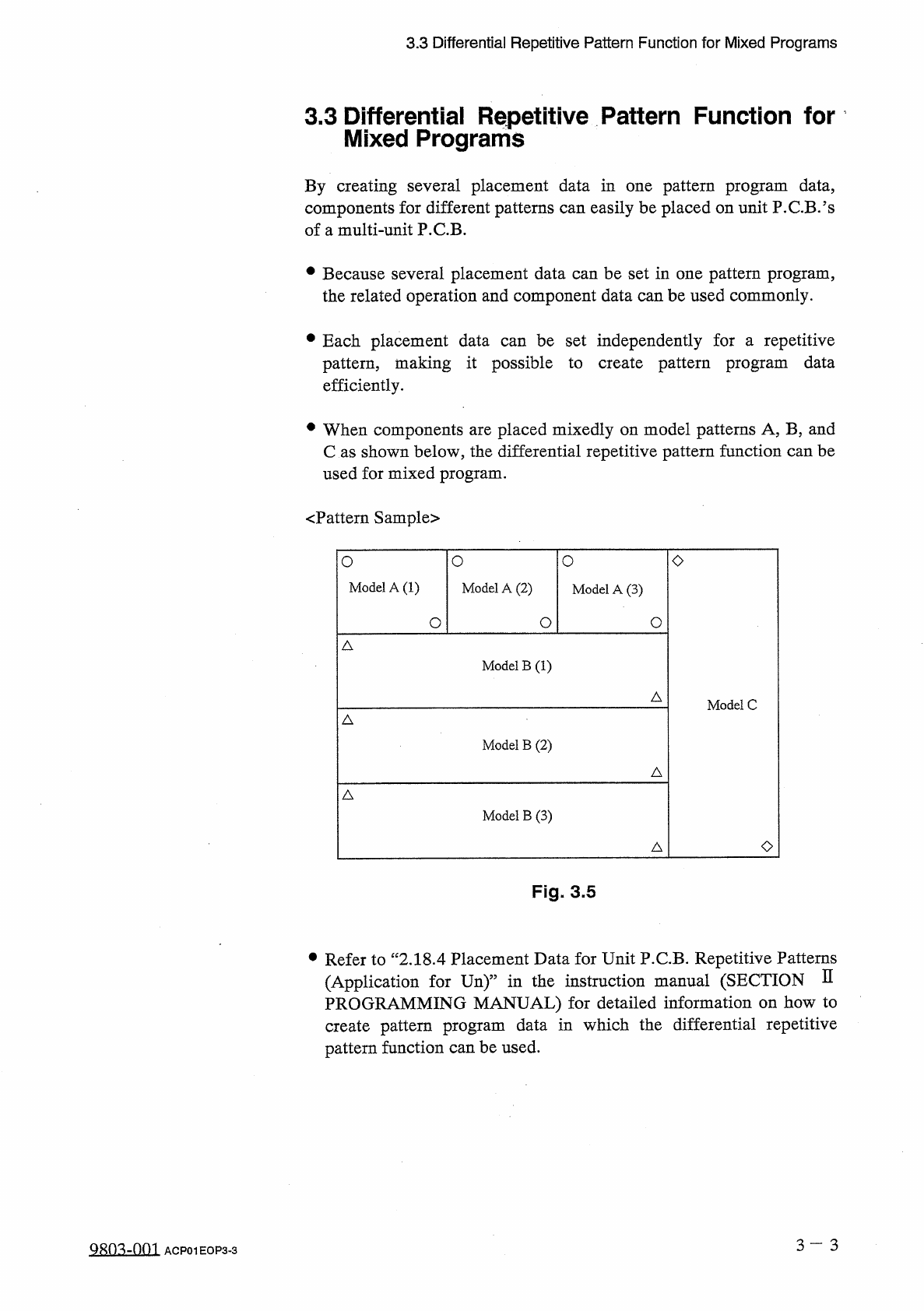
•
When
components
are
placed
mixedly
on
model
patterns
A
,
B
,
and
C
as
shown
below
,
the
differential
repetitive
pattern
function
can
be
used
for
mixed
program
.
〈
Pattern
Sample
>
O
O
O
o
Model
A
(
1
)
Model
A
(
2
)
Model
A
(
3
)
O
O
O
A
Model
B
(
l
)
A
Model
C
A
Model
B
(
2
)
A
A
Model
B
(
3
)
◊
A
Fig
.
3.5
•
Refer
to
“
2.18
.
4
Placement
Data
for
Unit
P
.
C
.
B
.
Repetitive
Patterns
(
Application
for
Un
)
”
in
the
instruction
manual
(
SECTION
PROGRAMMING
MANUAL
)
for
detailed
information
on
how
to
create
pattern
program
data
in
which
the
differential
repetitive
pattern
function
can
be
used
.
n
3
一
3
9
^
0
^
-
001
ACP
01
EOP
3
-
3