3_AVS-V2_MCT-UM-internal_EN_07-2019.pdf - 第155页
ASM AVS - U SER M ANUAL P AGE 155 OF 182 Platform 2+: SW -Version machine type head ≥ 601.xx Global X / Y Angle fk_off.ma fk_off.ma D-Series C+P 12 X new = X old + X 0 X new = X old + X 0 C+P 6 X new = X old + X 0 X new …
ASM AVS - USER MANUAL
PAGE 154 OF 182
7 Attachments
7.1 Corrections of Offset values on SIPLACE machines
If the measurement analysis described in 4.2.6.1.5 show, that a correction of the global offset is
necessary, it can be corrected on the SIPLACE machine in the machine data.
Pending on the software version, the way and place to be changed is different.
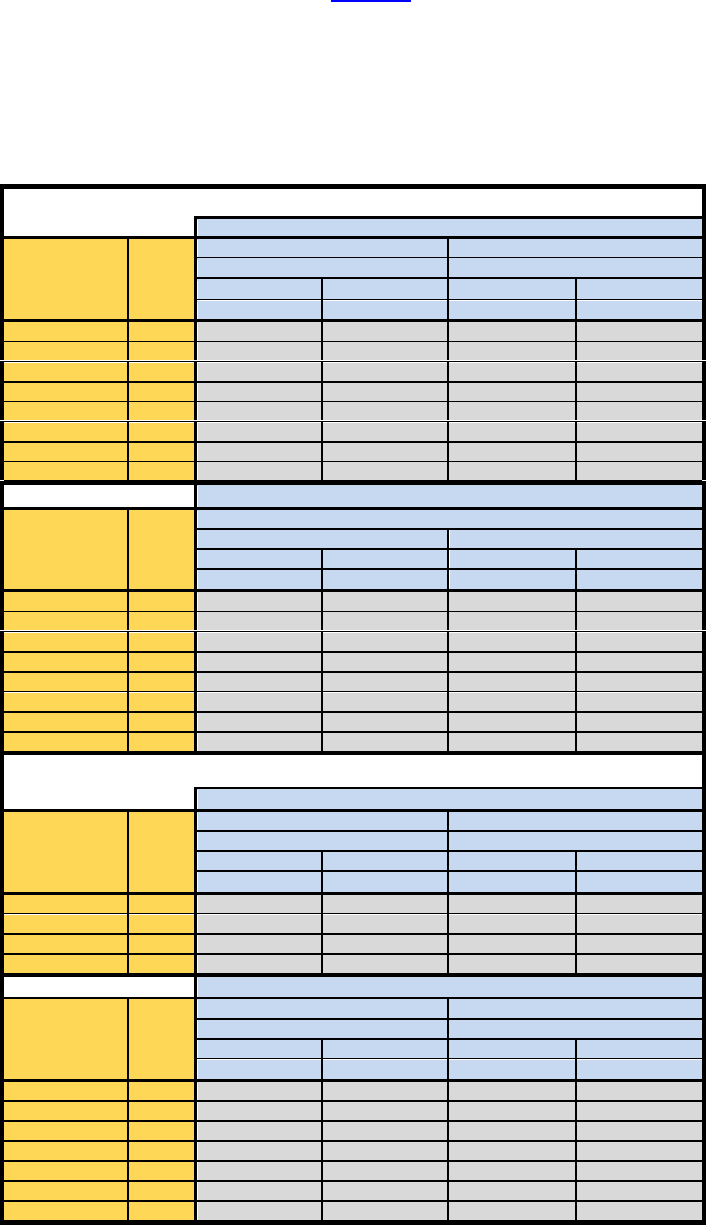
7.1.1 Overview of Offset correction (HOW)
Platform 1:
SW-Version
machine type
head
≤ 405.xx / 406.xx
406.xx
Global
Angle group (but X/Y)
X / Y
Angle
X / Y
Angle
Real.ma
Real.ma
Wnk_korr.ma
Wnk_korr.ma
F4
C+P 12
X
new
= X
old
- X
0
P+P
X
new
= X
old
- X
0
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
X
new
= X
old
- X
0
F5/F5HM
C+P 12
X
new
= X
old
- X
0
C+P 6
X
new
= X
old
- X
0
X
new
= X
old
+ X
0
P+P
X
new
= X
old
- X
0
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
X
new
= X
old
- X
0
S20/S23
C+P 12
X
new
= X
old
- X
0
SW-Version
machine type
head
407.xx (sowie 101.xx und 408.xx bei CS, CF)
Global
Angle group (but X/Y)
X / Y
Angle
X / Y
Angle
fk_off.ma
fk_off.ma
fk_off.ma
fk_off.ma
F4
C+P 12
X
new
= X
old
+ X
0
P+P
X
new
= X
old
+ X
0
X
new
= X
old
- X
0
X
new
= X
old
+ X
0
X
new
= X
old
- X
0
F5 / F5HM / CF
C+P 12
X
new
= X
old
+ X
0
C+P 6
X
new
= X
old
+ X
0
X
neu
= X
alt
- X
0
P+P
X
new
= X
old
+ X
0
X
neu
= X
alt
- X
0
X
new
= X
old
+ X
0
X
new
= X
old
- X
0
S20 / S23 / CS
C+P 12
X
new
= X
old
+ X
0
Platform 2:
SW-Version
machine type
head
501.xx
502.xx
Global
Global
X / Y
Angle
X / Y
Angle
Real.ma
Real.ma
fk_off.ma
fk_off.ma
S25HM
C+P 12
X
new
= X
old
+ X
0
C+P 6
X
new
= X
old
+ X
0
X
new
= X
old
- X
0
HS50
C+P 12
X
new
= X
old
- X
0
X
new
= X
old
+ X
0
SW-Version
machine type
head
503.xx
504.xx – 505.xx
Global
Global
X / Y
Angle
X / Y
Angle
fk_off.ma
fk_off.ma
fk_off.ma
fk_off.ma
S25HM / S227HM
C+P 12
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
C+P 6
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
HS50 / HS60
C+P 12
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
HF / HF-3
C+P 12
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
C+P 6
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
P+P
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
ASM AVS - USER MANUAL
PAGE 155 OF 182
Platform 2+:
SW-Version
machine type
head
≥ 601.xx
Global
X / Y
Angle
fk_off.ma
fk_off.ma
D-Series
C+P 12
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
C+P 6
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
X-Series
C+P 12
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
C+P 6
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
C+P 20
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
P+P
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
Platform 3:
SW-Version
machine type
head
≥ 701.xx
Global
X / Y
Angle
Edit via Sirio SW
in Service level
Edit via Sirio SW
in Service level
X-Series
C+P 12
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
C+P 6
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
CPP
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
C+P 20
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
P+P
X
new
= X
old
+ X
0
X
new
= X
old
+ X
0
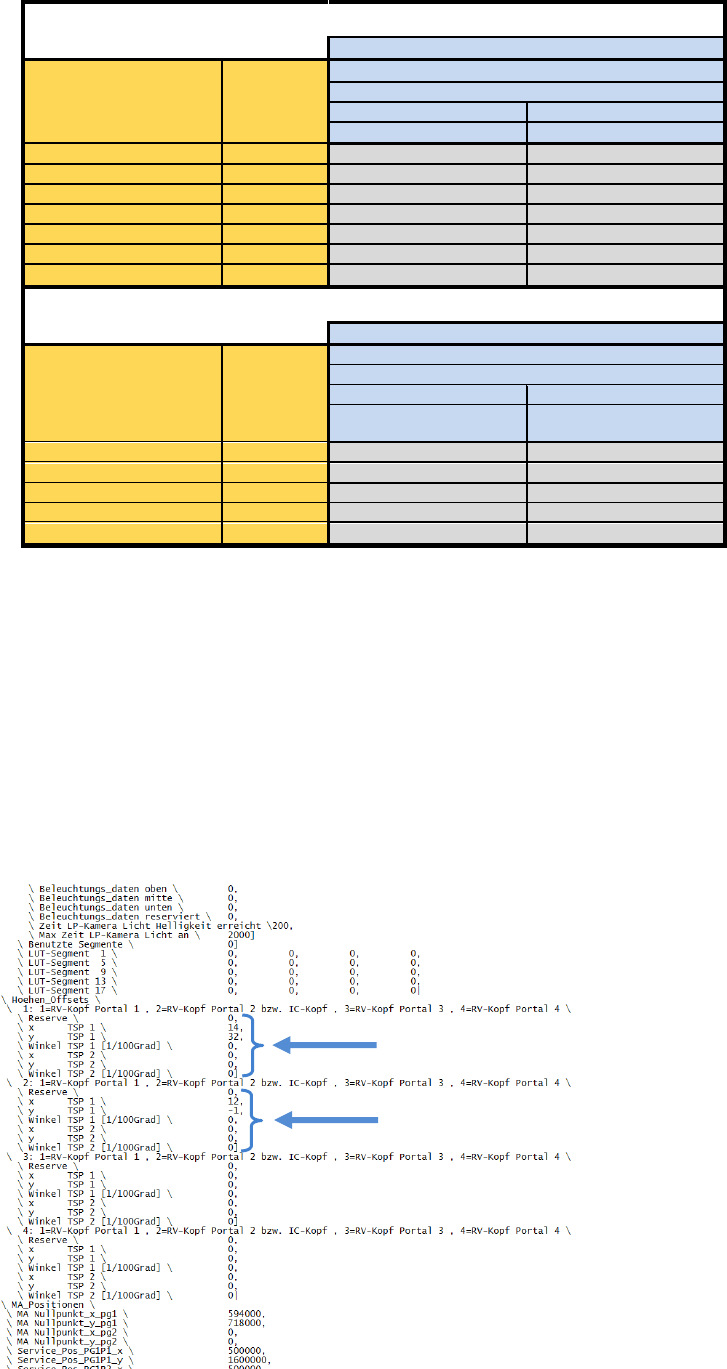
7.1.2 Description of the offset correction (WHERE)
7.1.2.1 Platform 1 with SW ≤ 405.xx, or 406.xx.
The global offset of a gantry, in other words the MEAN value can be corrected in the file Re-
al.ma.
In this file, the values can be found immediately following the camera data.
MA-Daten \ Hoehen-Offsets \
ASM AVS - USER MANUAL
PAGE 156 OF 182
In versions 405.xx and 406.xx of the station software, an angle group offset can also be cor-
rected for P&P heads in addition to the global offset.
This refers to situations where the head has performed "rotary placement", in other words
the components have been variously placed at the placement angles 0°, 90°, 180° and 270°.
The result can be output in relation to the relevant angle group in the evaluation software as
described in 4.3.2.3.
In other words, the results for all components placed at 90° are output.
This offset (mean) for 90° placement can then be corrected in the file Wnk_korr.ma in the
software versions mentioned above.
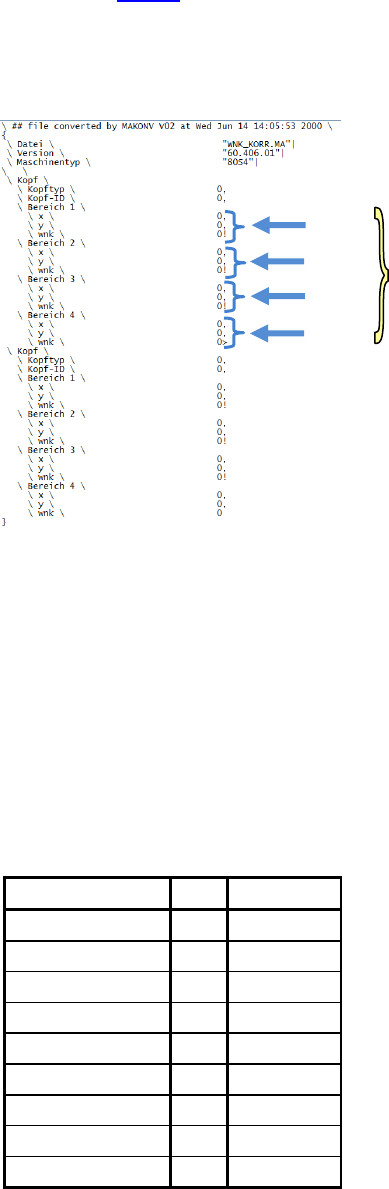
7.1.2.2 Platform 1 with version 407.xx (and 101.xx and 408.xx for CS, CF)
As of version 407 of the station computer software, the global offsets can also be corrected in a
separate file with the name FK_OFF.MA.
Correction of the angle group offsets was also integrated in the file FK_OFF.MA. For each entry,
correction values for "GLOBAL" and for the angle groups are always listed.
All possible combinations of head and camera are listed in the file.
When entering the offset, you must be careful to ensure that the values are entered for the cor-
rect configuration.
camera/gantry
ID
SST-No.
"RV6CamP1"
22
13
"RV6CamP2"
23
13
"RV12CamP1"
20
12
"RV12CamP2"
21
12
"IC1Cam"
10
7
"ICRatioCam"
18
10
"ICFCCam"
19
11
"RV6FCCamP1"
24
14
"RV6FCCamP2"
25
14
0°
90°
270°
The offset (mean) for X, Y
and angle can be entered
here with respect to the
angle group.
180°