SIPLACE Vision Customer_en.pdf - 第142页
SIPLACE Vision - Teaching Fiducials Fiducial shapes Sample Fiducials for Position Recognition S tudent Guide SIPLACE V ision (Customer) SIPLACE Vision - T eaching Fiducials Edition 12/2008 EN 142 6.2.2.2 Position and Qua…
SIPLACE Vision - Teaching Fiducials
Sample Fiducials for Position Recognition Fiducial shapes
Student Guide SIPLACE Vision (Customer)
Edition 12/2008 EN SIPLACE Vision - Teaching Fiducials
141
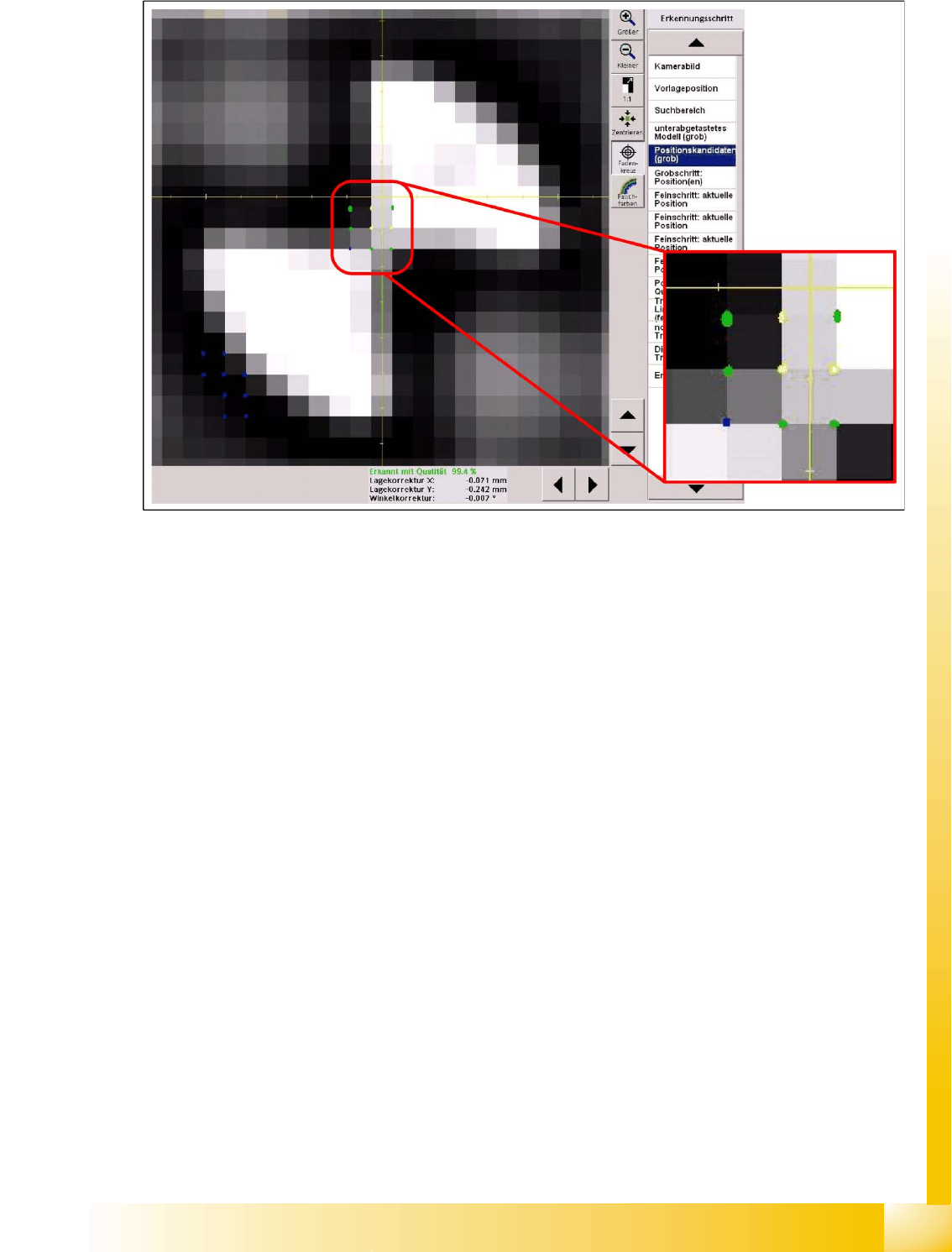
6.2.2.1 Position Candidates
6-10: Coarse position candidates
The yellow dots show positions for which a coarse pattern matches very well.
The green dots show positions for which the coarse pattern matches well.
The blue dots show points with relatively low matching.
The high match positions will be evaluated first during the next centering steps.
2 fine searches are performed with the points which have been combined to form "moxels". This is then
followed by 2 fine searches with high resolution (one search for the dark outer edge and one search for
the light inner edge).
SIPLACE Vision - Teaching Fiducials
Fiducial shapes Sample Fiducials for Position Recognition
Student Guide SIPLACE Vision (Customer)
SIPLACE Vision - Teaching Fiducials Edition 12/2008 EN
142
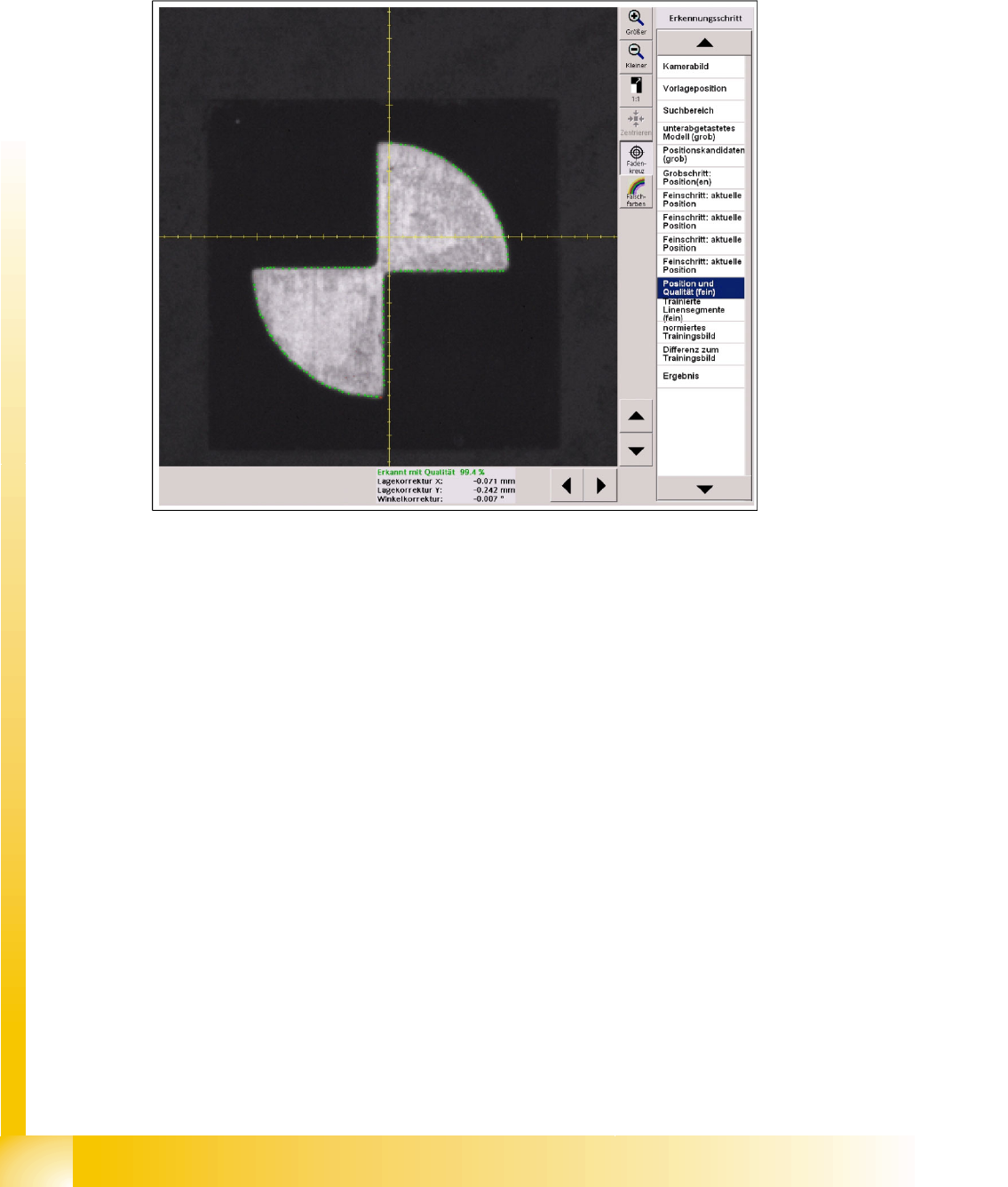
6.2.2.2 Position and Quality
In this case, the green dots show the matches between the outer edge positions and the camera image.
The more matches are found, the higher the quality value will be.
This procedure involves teaching distinctive fiducial points and points with high contrast.
If these points are found again during measurement, they will be marked green.
If they are not found again, they will be marked red.
6-11: Fiducial pattern recognition for position and quality, based on the outer shape
SIPLACE Vision - Teaching Fiducials
Sample Fiducials for Position Recognition Fiducial shapes
Student Guide SIPLACE Vision (Customer)
Edition 12/2008 EN SIPLACE Vision - Teaching Fiducials
143
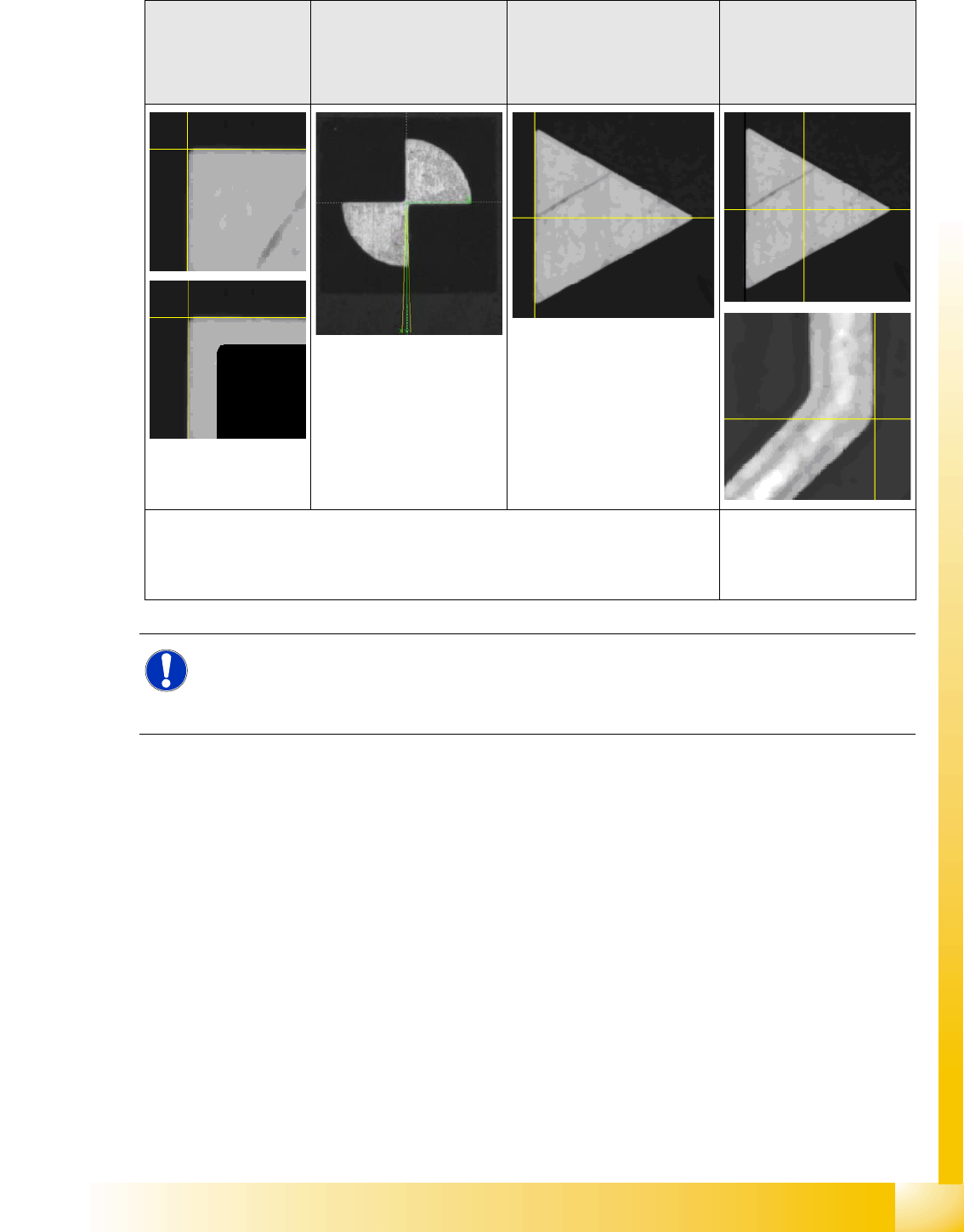
6.2.2.3 Sample Fiducial Patterns
Sample fiducials can use the following shapes for position determination:
6.2.2.4 Algorithm Parameters
The quality threshold for the fine search can be set here.
You can also switch over between robust and fast search algorithms for the pattern search. You should
not change the default setting "robust".
Shapes with
rectangular angles,
identical to those in
the camera
coordinate system
Shapes which are
symmetrically arranged
around a center point
A combination of corner-
defined and center-
symmetrical shapes
Special reference point or
non-rectangular shapes
e.g.:Areas on the
board with ground,
rectangular circuit path
e.g.: Quarter circle
segments or squares which
touch one another at a
corner
The change in brightness
gradient defines the fiducial
reference point.
The fiducial reference point and the fiducial pattern can be learnt automatically. The reference point needs
to be manually defined for
the triangle, followed by
fiducial pattern learning.
NOTE:
Placement Accuracy
In all these sample fiducials, the programmer must make sure that the programmed fiducial
coordinates in the PCB program correspond to the fiducial reference point detected by SIPLACE
Vision.