SIPLACE Vision Customer_en.pdf - 第95页
Component Shapes Optical Recognition of Shields Specific Component Shapes S tudent Guide SIPLACE Vision (Customer) Edition 12/2008 EN Component Shapes 95 5.3.12 Optical Recognition of Shields The shield centering pr oced…
Component Shapes
Specific Component Shapes Shields
Student Guide SIPLACE Vision (Customer)
Component Shapes Edition 12/2008 EN
94
Filter type 250, for poor edge quality;
As in the case of the default setting, several
candidates are possible. However, in this
case, an additional scan is not performed
(suitable for Shields with poor edge quality.
The edge in the diagram shown has both bright
and dark points).
Filter type 251, for double edges caused by
springs or recesses;
Binary diagram: automatically determines a
suitable gray value threshold for binarization of
the image. A binarized image only has two
gray values: 0 and 255. Edge recognition in the
binary image is performed with an additional
scan (for Shields with springs and double
edges caused by shield indentations and
steep illumination. The bottom part of the
shield in the diagram has protruding elements,
which the measuring result is not supposed to
determine, and a double edge). If this filter type
is needed for a corner, we advise you to set it
for all corners. This means that the position is
determined in the same manner for all corners,
increasing measurement accuracy.
Component Shapes
Optical Recognition of Shields Specific Component Shapes
Student Guide SIPLACE Vision (Customer)
Edition 12/2008 EN Component Shapes
95
5.3.12 Optical Recognition of Shields
The shield centering procedure determines the CO center position, based on corner recognition data.
A.) Coarse and
B.) Fine centering.
If no circles or similar are programmed, further component inspections will not be performed.
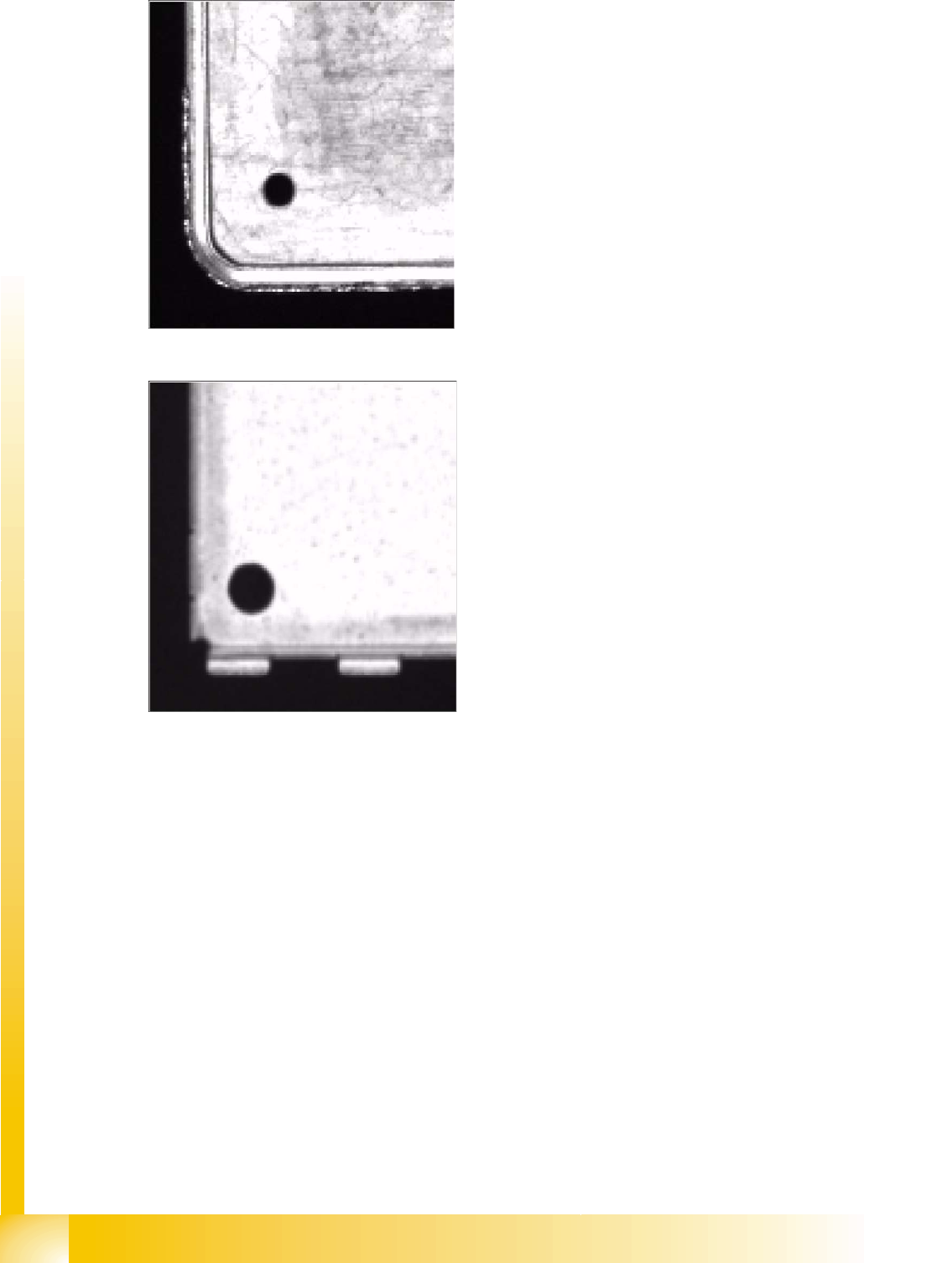
Coarse centering outer corner
As can be seen in the camera gray image, the
system searches for the brighter edge, from
outside.
Taken from below, these camera images usually
have a double edge at the outer corners. The
vertical sheet trim (arrow) forms the body height
and can be clearly recognized on both sides of the
corner, due to the corner recesses in the shield
cover.
On the horizontal side of the corner, the double
edge only covers 1.4 mm.
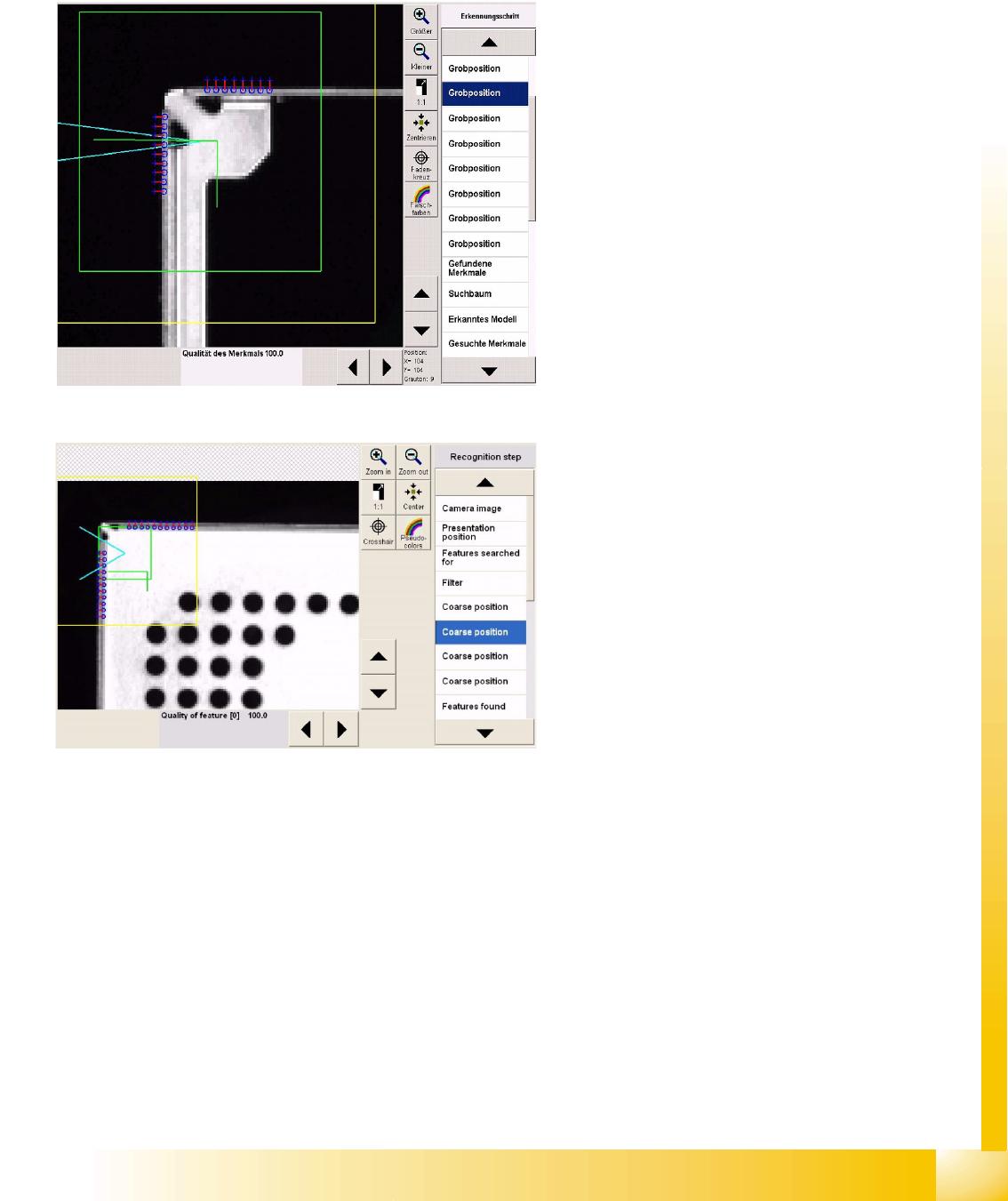
The defined image pairs are used to determine the
dark background (blue cross) and the
lighter CO body (blue ring).
Coarse centering inner corner
This double inner corner with corner protrusion
and slant will not be programmed, as the leg
lengths are too short. We recommend that you
create the distance between corners 2 mm greater
than the corner protrusion.
The vertical recognition line is set to the shortest
possible length of 1.8 mm (six image pairs with
minimum pitch).
Component Shapes
Specific Component Shapes Optical Recognition of Shields
Student Guide SIPLACE Vision (Customer)
Component Shapes Edition 12/2008 EN
96
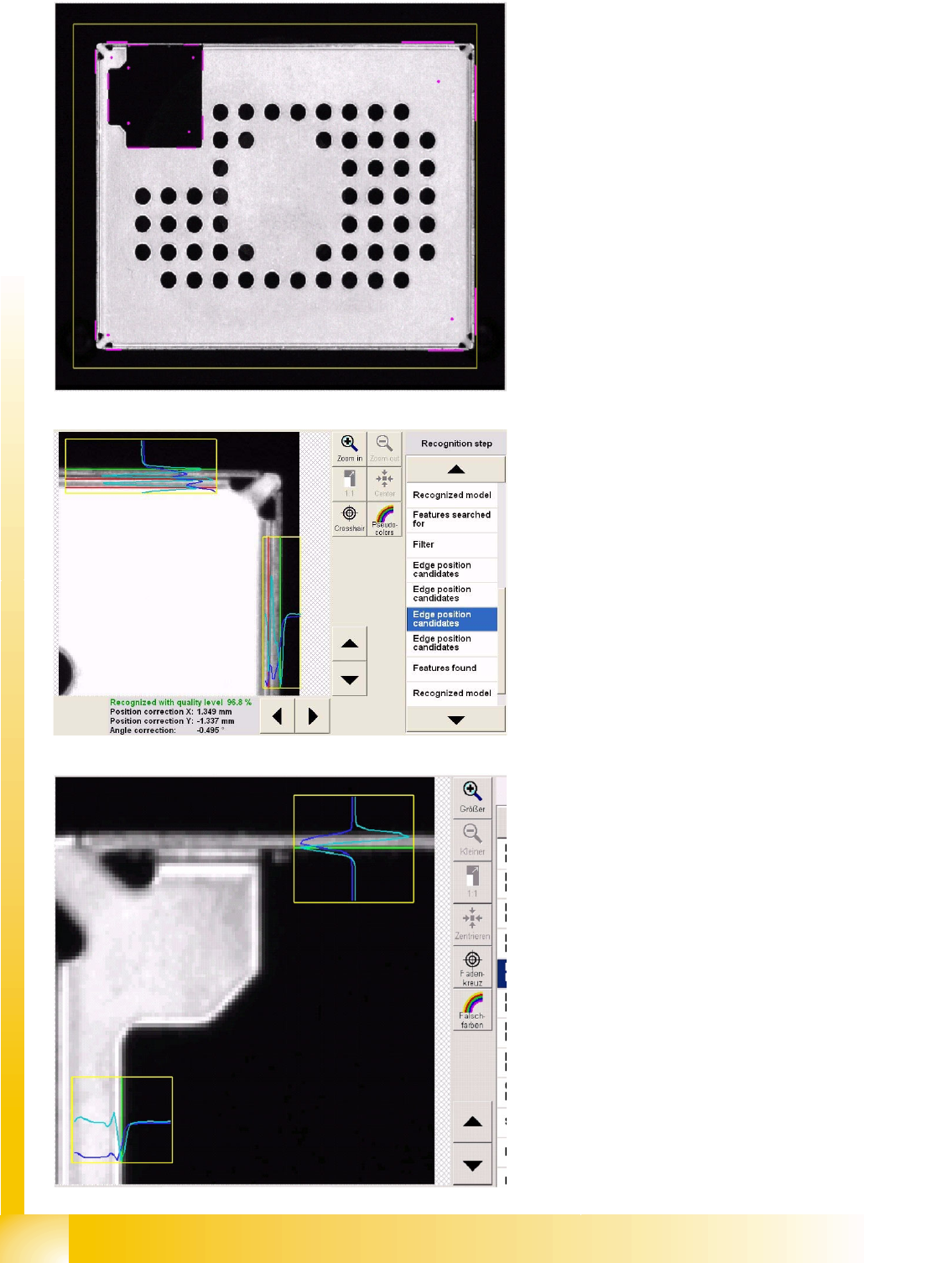
Features found
The example shown uses the programming option
for all four outer and all four inner corners.
The purple lines show the corner recognition
vectors.
The purple point is the corner inner point.
The step Recognized model also shows all
corners (shown in green here) and the coarse
position found.
Recognition step Edge position
candidates for outer edges
This steps uses brightness gradients to filter out
the real "edge to corner" distance at each corner
and on each of the two recognition edges.
The brightness in the vertical direction is shown in
dark blue here.
The brightness gradient for the evaluation is
turquoise/light blue.
The red lines show invalid edge positions, which
will not be considered as shield edges.
The green lines are valid edge positions.
Recognition step Edge position
candidates for inner edges
As inner edges are usually cut-outs, there is a
clear brightness transition here, which is
recognized as a shield edge.
In the top evaluation window, the evaluation can
be clearly seen on the vertical metal edge.