SIPLACE Vision Customer_en.pdf - 第169页
SIPLACE Pro 3.0 Programming Interface for C omponent Shapes Component Camera Selected Handling Component Progra mming S tudent Guide SIPLACE Vision (Customer) Edition 12/2008 EN SIPLACE Pro 3.0 Programming Inte rface for…
SIPLACE Pro 3.0 Programming Interface for Component Shapes
Handling Component Programming Pickup Position Tolerance and Nozzle Assignment
Student Guide SIPLACE Vision (Customer)
SIPLACE Pro 3.0 Programming Interface for Component Shapes Edition 12/2008 EN
168
7.4.1 Pickup Position Tolerance and Nozzle Assignment
It is important for pickup position tolerance to determine how the size of the nozzle contact surface and
the component surface match one another. Nozzle programming and pickup position tolerance are
therefore explained in this section.
7.4.1.1 Pickup Position Tolerance
The pickup position tolerance standard values are derived from the size of the component shape.
When programming the real pickup position tolerance in your placement process, a differentiation is
made between 2 'types'.
CS dimension significantly larger than the nozzle tip
Due to high tolerance values for nozzle putdown, neither a placement nor a vacuum error can occur.
This means that the full position tolerance, calculated from the component tolerance in the feeder or tape
pocket, can be programmed here.
CS dimension similar or smaller than the nozzle tip
Due to low tolerance values for nozzle putdown, you need to take the placement pitch on the PCB into
account.
If high pickup tolerances cause the nozzle to reach considerably over the side edge of the component,
this could cause the nozzle to touch the neighboring component and change it at the moment of
placement. Observe the component pitches set in the PCB layout!
It is therefore recommendable to program a pickup tolerance which is roughly the same as the thickness
of the nozzle or just the value of the component edge pitch during placement.
To estimate the thickness of the nozzle, use the X/Y coordinates of the mouse cursor position. (See the
dimensions as in the diagram at the bottom right.)
In certain circumstances, you may need to adhere to a specific placement order (resistors before
capacitors) or you may need to use nozzles which are smaller than the component to achieve placement
with the required low pitches.
SIPLACE Pro 3.0 Programming Interface for Component Shapes
Component Camera Selected Handling Component Programming
Student Guide SIPLACE Vision (Customer)
Edition 12/2008 EN SIPLACE Pro 3.0 Programming Interface for Component Shapes
169
7.4.1.2 Nozzle Assignment
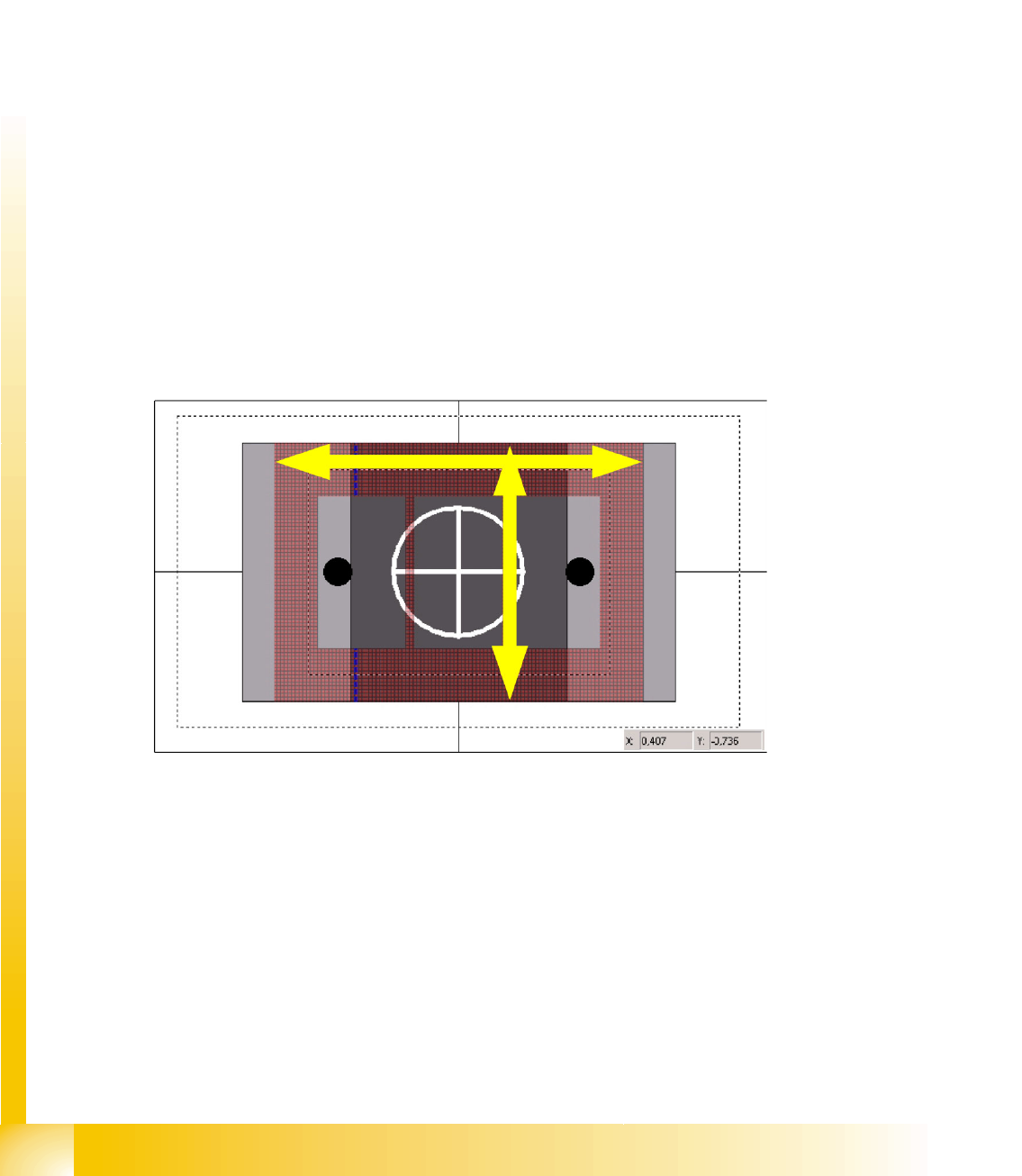
Outer dimensions
The outer length or outer width shown in the diagram above can be used to determine possible
placement problems as these outer nozzle edges or the outer diameter could touch neighboring
components. In the case of extremely small nozzle tips, you can also determine whether these tips can
be inserted into the pickup pockets of the tape or whether they will be seated on the tape surface for
pickup.
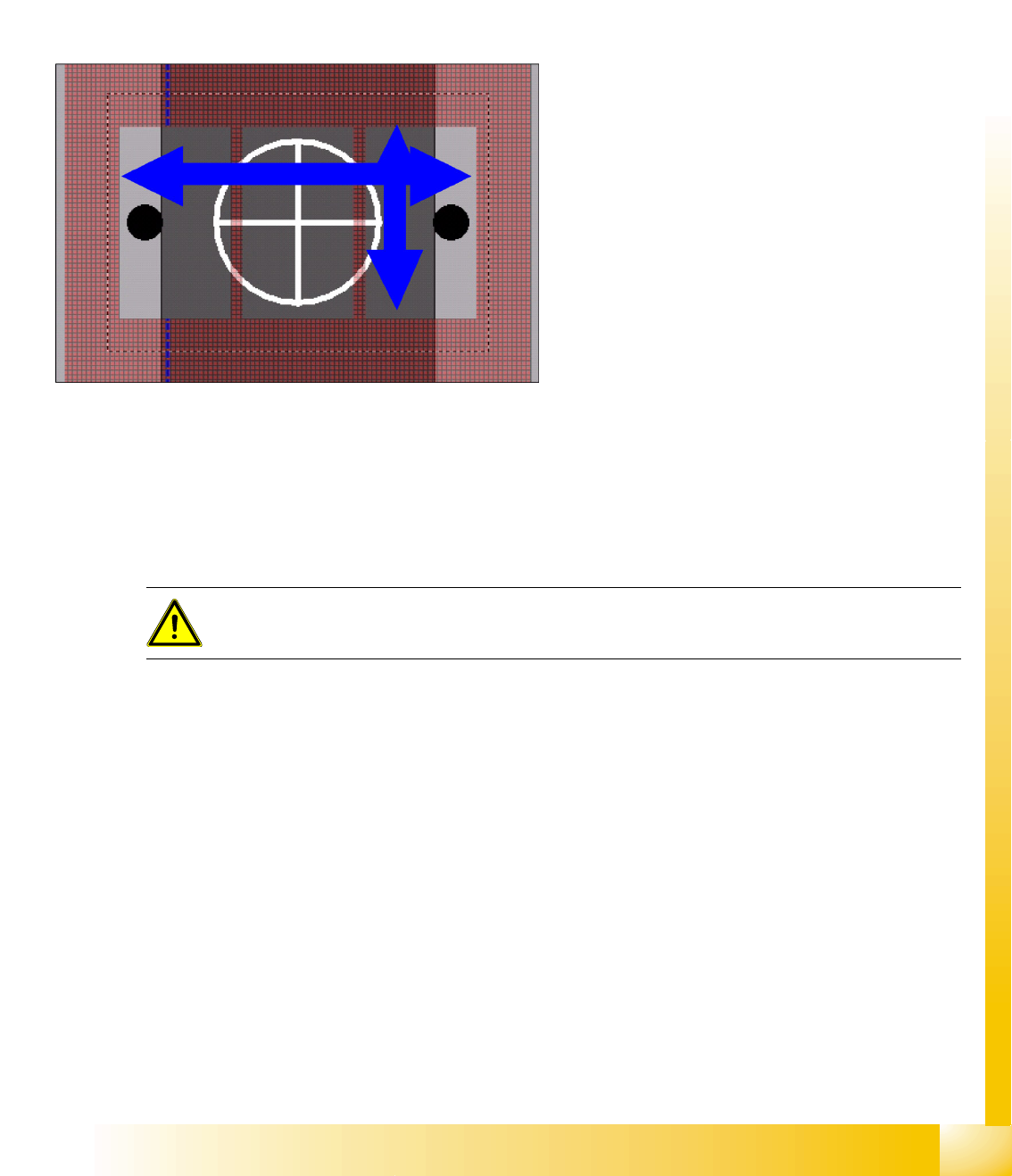
Inner dimensions
7.4.2 Component Camera Selected
The camera field of vision shown can be used to determine whether a component with the specified
pickup tolerances can be optically centered. In the case of stationary cameras, you can see whether
multiple measurement is required. (precise Z positioning in the focal height is required for this) You will
not be able to see whether a camera has reached its specific limits.
This shows whether there is a risk that
components which are smaller than the nozzle
surface could be sucked in despite the nozzle
vertical separation which may be present. You can
also determine whether vacuum errors could
occur during component pickup, particularly when
the pickup tolerances are too great.
ATTENTION:
ONLY select
Deactivate Check for minimal Comp.shape structure
in rare exceptions!
SIPLACE Pro 3.0 Programming Interface for Component Shapes
Handling Component Programming Reduced Acceleration Values
Student Guide SIPLACE Vision (Customer)
SIPLACE Pro 3.0 Programming Interface for Component Shapes Edition 12/2008 EN
170
7.4.3 Reduced Acceleration Values
To avoid difficulties placing exotic components, you can reduce the acceleration values for all axes in
the placement machine.
To still keep the placement performance high, the programmed acceleration values are axis-specific and
nozzle-specific.
Because the machines have to perform many different conditions of acceleration please look into the list
of acceleration values in the SIPLACE Pro Online Help.
7.4.4 Basic Handling of Component Shapes
Z axis in g S-20 RV 12 5.30
S-23/CS RV 12 6.40
F4/F5/F5HM/CF RV 12 6.40
RV 6 5.30
P&P 1.30
HS50 RV 12 12.25
HS60 RV 12 15.29
D series RV 12 18.04
RV 6 9.41
P&P 4.90
X series
or
HF/HF3
RV 12 18.04
RV 6 9.41
P&P 4.90
C&P20 21.00
S25HM RV 12 12.25
RV 6 12.25
S27HM RV 12 12.25
RV 6 12.25
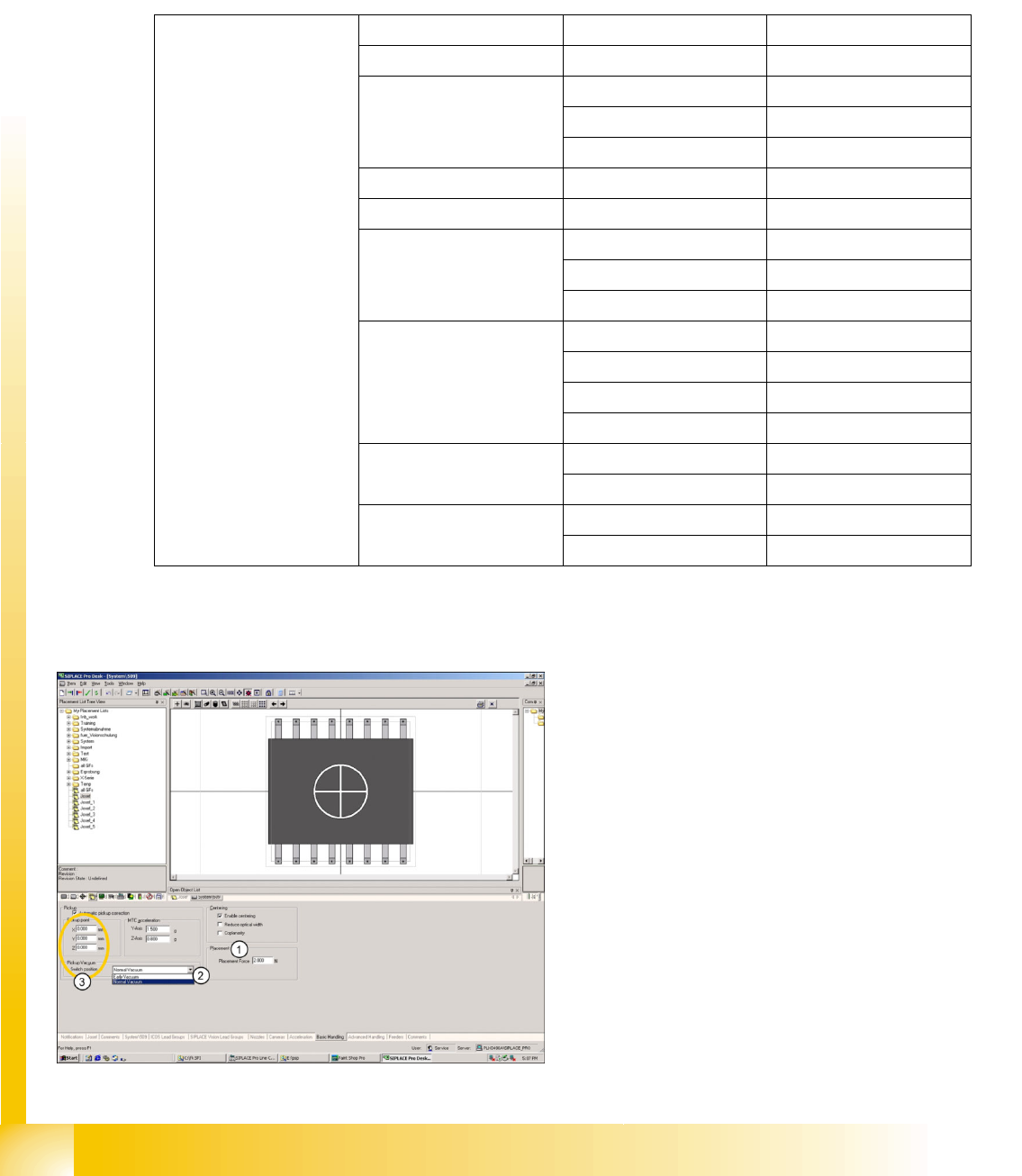
1. Enter the placement force. The placement
mode can be specified in the Advanced
Handling window and also enabled/disabled
there.
2. Early Vacuum is the only special mode which
can be enabled here.
3. A non-central pickup point for the component
shape can be programmed here. This does
not affect the component center, which is
referred to for component centering in the
Vision system. The pickup position correction
value for the feeder refers to this new
component pickup point and is added to it.
Please note that this function is only supported
in older machines with SC/MC 503.xx or
higher.