SIPLACE Vision Customer_en.pdf - 第167页
SIPLACE Pro 3.0 Programming Interface for C omponent Shapes Vision Data Manager Handling Component Programming S tudent Guide SIPLACE Vision (Customer) Edition 12/2008 EN SIPLACE Pro 3.0 Programming Inte rface for Compon…
SIPLACE Pro 3.0 Programming Interface for Component Shapes
Programming the Component Shapes in SIPLACE Vision Application Example for 'Requires Separate Group Description'
Student Guide SIPLACE Vision (Customer)
SIPLACE Pro 3.0 Programming Interface for Component Shapes Edition 12/2008 EN
166
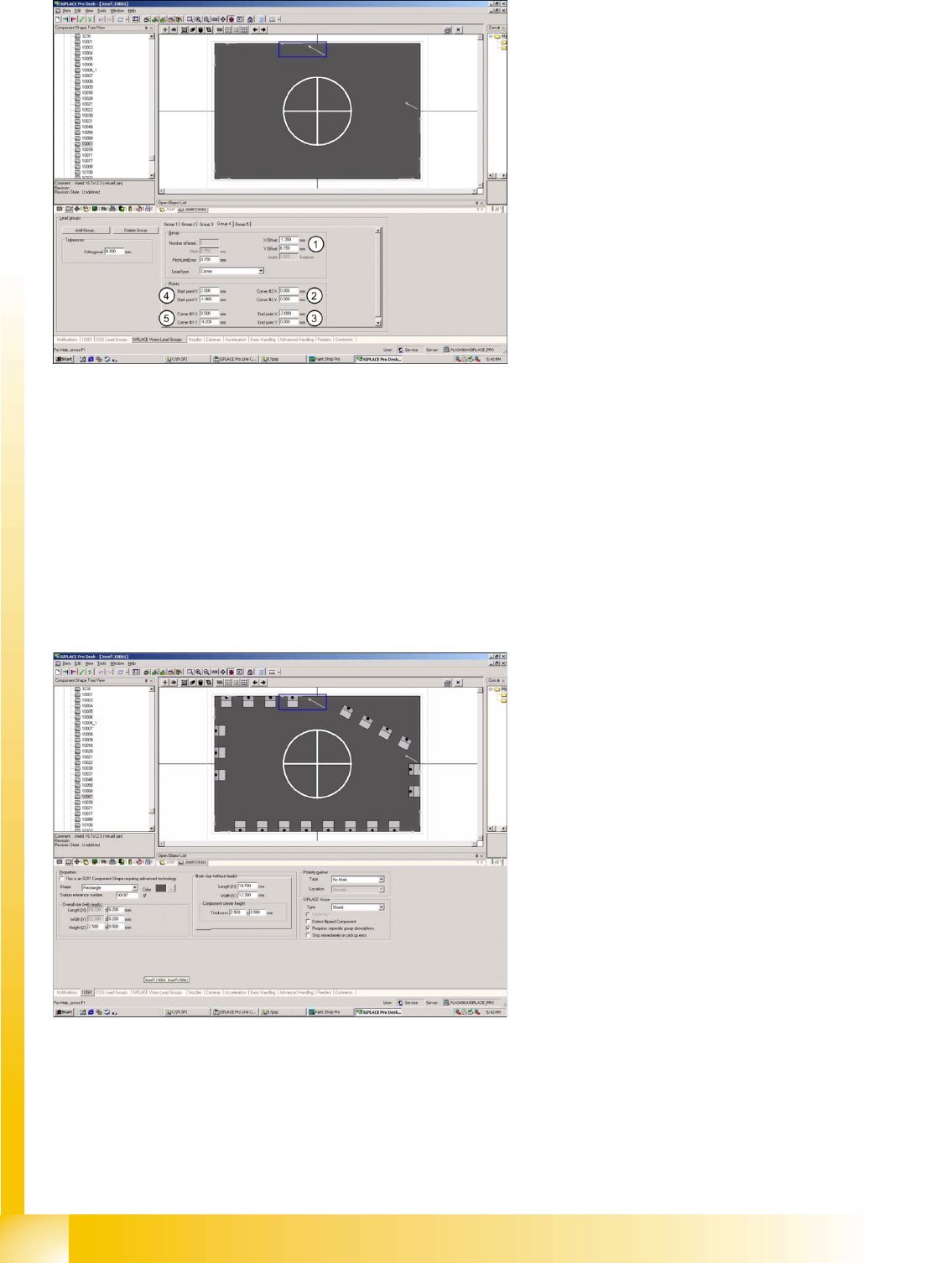
For SIPLACE Vision, CORNER recognition is programmed on the outer edge of the Shield.
For SIPLACE Pro, there are two programming options:
Programming the corner positions as the basis for definition of the coordinates for the lead start and
end recognition vectors.
Programming the component center as the basis for the definition of the lead start and end
recognition vectors.
A further alternative is to directly correct/program the X/Y offset values of a recognition position in
SIPLACE Vision. We particularly recommend this option for corners which can not be programmed with
an opening angle of 90°.
Legend
1. Corner offset from the component center.
2. Start point for the horizontal recognition
vector.
3. End point for the horizontal recognition vector.
4. Start point for 30° corner recognition vector.
5. End point for 30° corner recognition vector.
This programming window for body dimensions
shows ICOS lead group programming, with 21
leads in five groups.
The arrows in the Shield corners show the
programming of SIPLACE Vision recognition
vectors; the blue window marks one of five
programmed corners.
At the end of component shape programming, the
integrity check (see above) can be used to check
the dataset for completeness and correctness
(new in SIPLACE Pro 3.0).
SIPLACE Pro 3.0 Programming Interface for Component Shapes
Vision Data Manager Handling Component Programming
Student Guide SIPLACE Vision (Customer)
Edition 12/2008 EN SIPLACE Pro 3.0 Programming Interface for Component Shapes
167
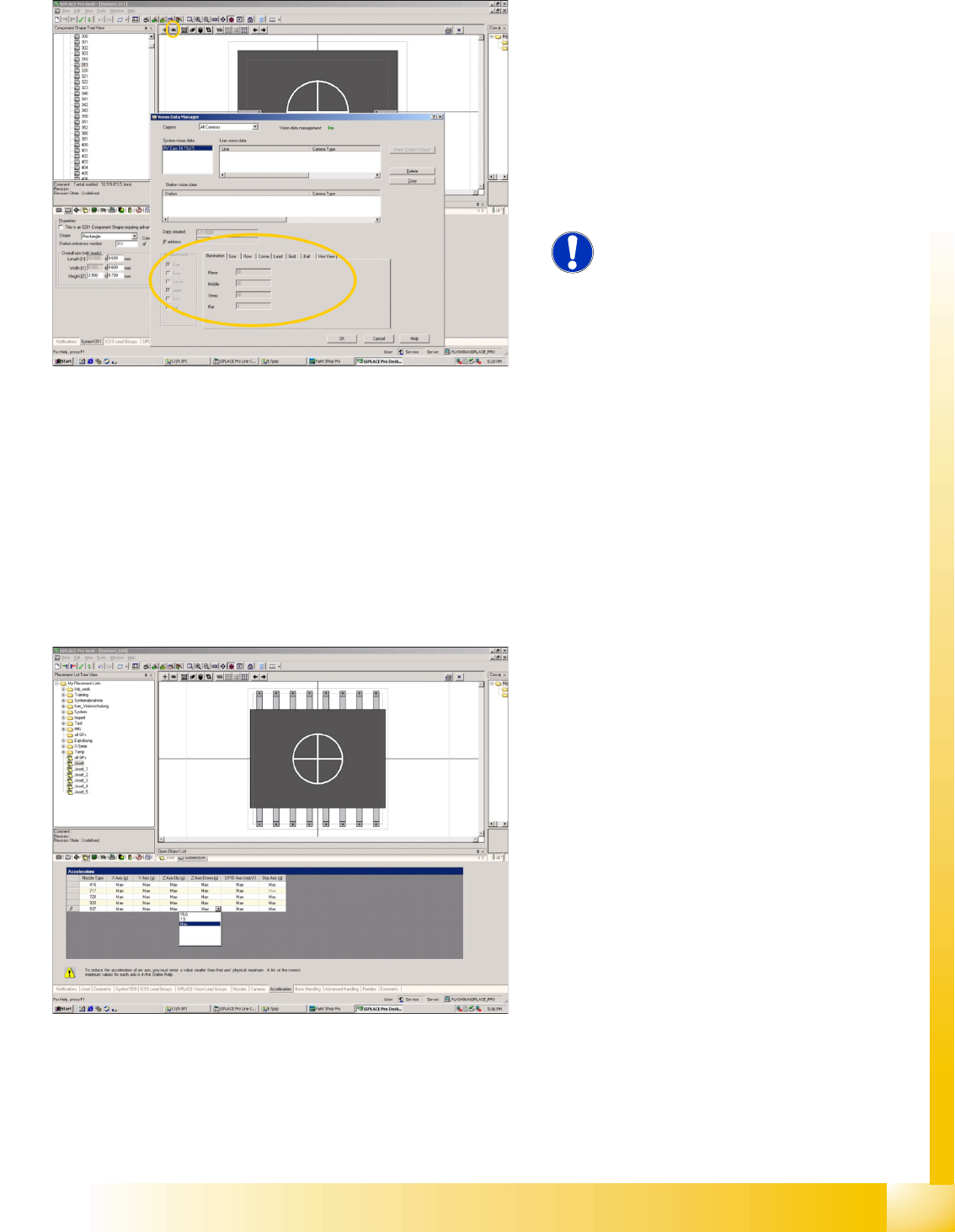
7.3.5 Vision Data Manager
7.4 Handling Component Programming
The Vision Data Manager (VDM) enables you to
check the component shape teaching data. This
can also be performed when the Vision Manager
(full) function is disabled (Vision Management is
switched to ON in screen dump).
Click on the eye symbol to view the teaching data
for a particular camera type. Select the required
Camera to view the insensitive data for the ICOS
measurement methods and camera illumination.
NOTE: When importing the CS data,
always import the SST files!
Experience shows that this is often
forgotten, although this is very
important.
If leads have been programmed for this
component shape, although the lead
measurement mode is disabled in the SST file, it
can be assumed that a programming trick was
used in ICOS. Nonstandard programming
methods such as these might well have a negative
affect on the SIPLACE Vision centering
procedure.
The acceleration of the selected axis refers to the
fastest machine type. Maximum therefore means
that the fastest axis speed for that machine type is
permitted.
If the acceleration is reduced, this will ONLY
reduce the acceleration value and will not initiate a
special processing mode*.
* In the SR/MC 4XX.xx Sw, reduced acceleration
programs slower initial Z-axis upwards travel.
SIPLACE Pro 3.0 Programming Interface for Component Shapes
Handling Component Programming Pickup Position Tolerance and Nozzle Assignment
Student Guide SIPLACE Vision (Customer)
SIPLACE Pro 3.0 Programming Interface for Component Shapes Edition 12/2008 EN
168
7.4.1 Pickup Position Tolerance and Nozzle Assignment
It is important for pickup position tolerance to determine how the size of the nozzle contact surface and
the component surface match one another. Nozzle programming and pickup position tolerance are
therefore explained in this section.
7.4.1.1 Pickup Position Tolerance
The pickup position tolerance standard values are derived from the size of the component shape.
When programming the real pickup position tolerance in your placement process, a differentiation is
made between 2 'types'.
CS dimension significantly larger than the nozzle tip
Due to high tolerance values for nozzle putdown, neither a placement nor a vacuum error can occur.
This means that the full position tolerance, calculated from the component tolerance in the feeder or tape
pocket, can be programmed here.
CS dimension similar or smaller than the nozzle tip
Due to low tolerance values for nozzle putdown, you need to take the placement pitch on the PCB into
account.
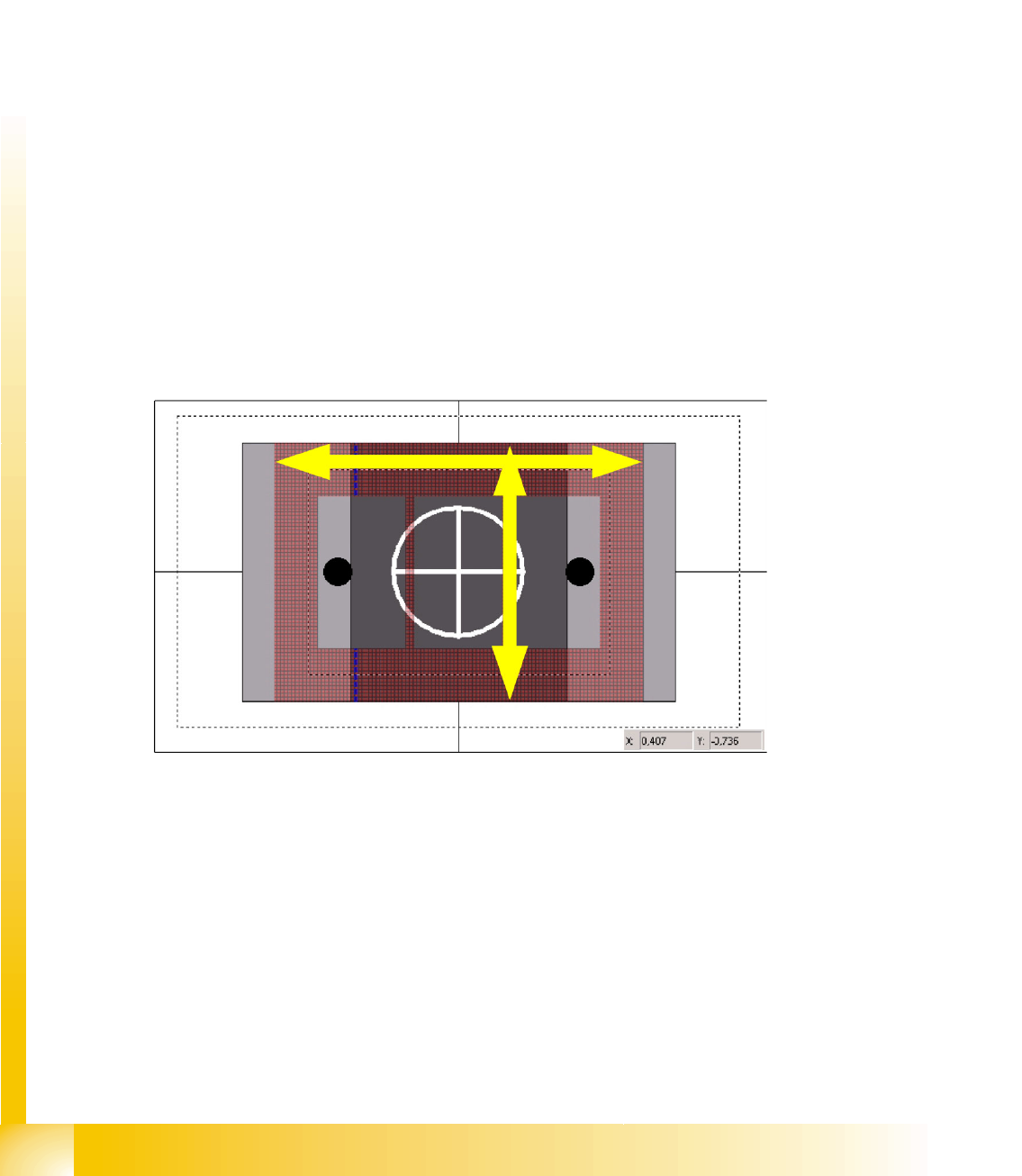
If high pickup tolerances cause the nozzle to reach considerably over the side edge of the component,
this could cause the nozzle to touch the neighboring component and change it at the moment of
placement. Observe the component pitches set in the PCB layout!
It is therefore recommendable to program a pickup tolerance which is roughly the same as the thickness
of the nozzle or just the value of the component edge pitch during placement.
To estimate the thickness of the nozzle, use the X/Y coordinates of the mouse cursor position. (See the
dimensions as in the diagram at the bottom right.)
In certain circumstances, you may need to adhere to a specific placement order (resistors before
capacitors) or you may need to use nozzles which are smaller than the component to achieve placement
with the required low pitches.