SIPLACE Vision Customer_en.pdf - 第144页
SIPLACE Vision - Teaching Fiducials Fiducials for Good/Bad Recognition of panels Synthetic Inkspots S tudent Guide SIPLACE V ision (Customer) SIPLACE Vision - T eaching Fiducials Edition 12/2008 EN 144 6.3 Fiducials for …
SIPLACE Vision - Teaching Fiducials
Sample Fiducials for Position Recognition Fiducial shapes
Student Guide SIPLACE Vision (Customer)
Edition 12/2008 EN SIPLACE Vision - Teaching Fiducials
143
6.2.2.3 Sample Fiducial Patterns
Sample fiducials can use the following shapes for position determination:
6.2.2.4 Algorithm Parameters
The quality threshold for the fine search can be set here.
You can also switch over between robust and fast search algorithms for the pattern search. You should
not change the default setting "robust".
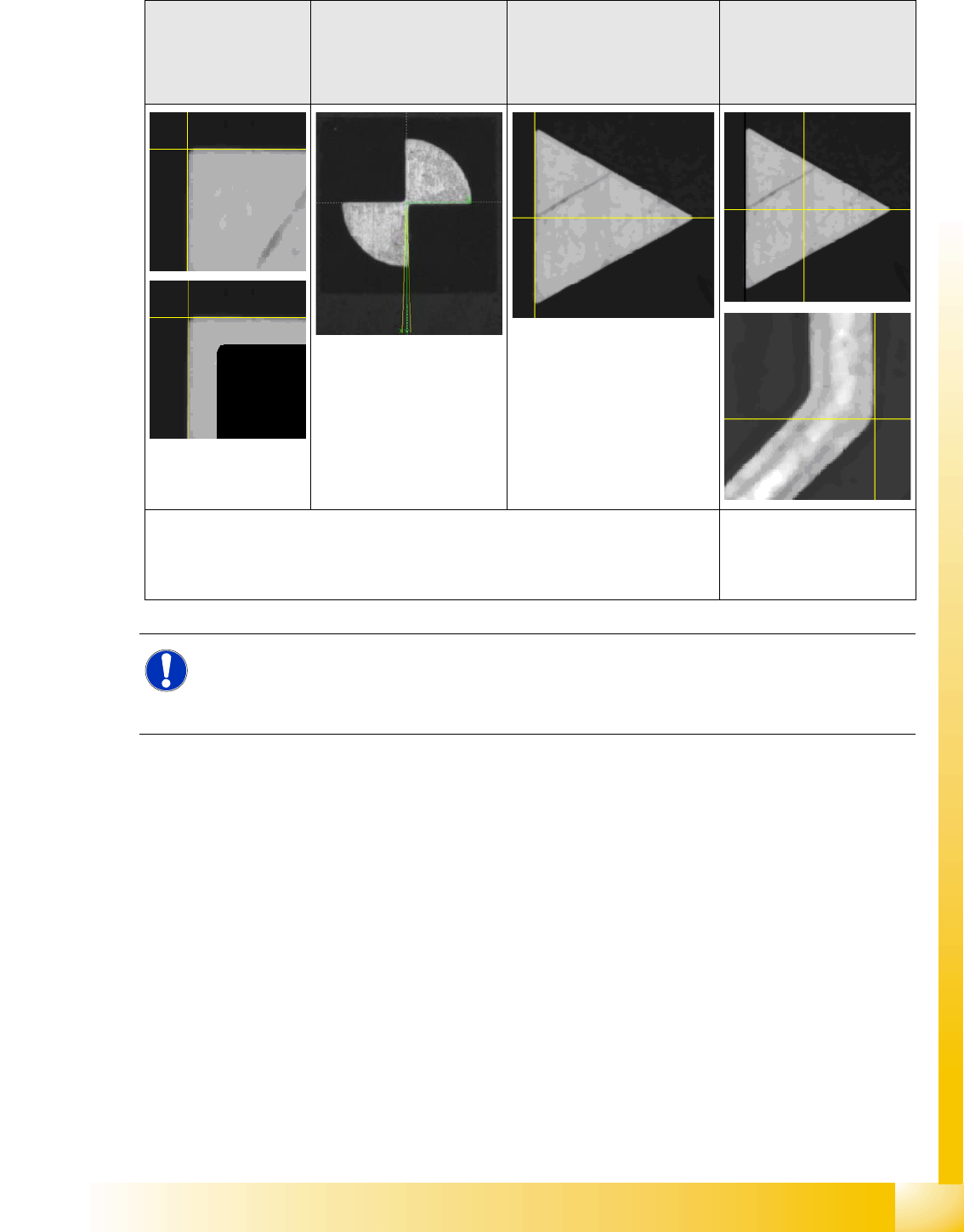
Shapes with
rectangular angles,
identical to those in
the camera
coordinate system
Shapes which are
symmetrically arranged
around a center point
A combination of corner-
defined and center-
symmetrical shapes
Special reference point or
non-rectangular shapes
e.g.:Areas on the
board with ground,
rectangular circuit path
e.g.: Quarter circle
segments or squares which
touch one another at a
corner
The change in brightness
gradient defines the fiducial
reference point.
The fiducial reference point and the fiducial pattern can be learnt automatically. The reference point needs
to be manually defined for
the triangle, followed by
fiducial pattern learning.
NOTE:
Placement Accuracy
In all these sample fiducials, the programmer must make sure that the programmed fiducial
coordinates in the PCB program correspond to the fiducial reference point detected by SIPLACE
Vision.
SIPLACE Vision - Teaching Fiducials
Fiducials for Good/Bad Recognition of panels Synthetic Inkspots
Student Guide SIPLACE Vision (Customer)
SIPLACE Vision - Teaching Fiducials Edition 12/2008 EN
144
6.3 Fiducials for Good/Bad Recognition of panels
These fiducials can display any type of irregular shape, since you only need to evaluate the quality or
brightness for this placement classification.
There are certain "synthetic inkspots" for which the outer shape is searched and for which placement
is performed or not performed, depending on the quality value. The fiducial shapes are the same as
the synthetic fiducial shapes for position recognition.
You need to teach the brightness or the contrast between the good and bad cases for trained
inkspots.
Inkspot recognition is ALWAYS performed after PCB position recognition.
6.3.1 Synthetic Inkspots
If the synthetic inkspot fiducial is found (i.e. the quality is above the fiducial recognition threshold), the
machine will perform placement. If it is not found, the panel concerned will be omitted. The quality
determination for position recognition synthetic fiducials is identical to that for good/bad recognition
synthetic fiducials.
This method of description is suitable when a fiducial is used as an inkspot and, in the event of "not
placed", is covered or blacked out. However, it is important that the fiducial is completely blacked out
with the pen. If it still shines through, it may still be found.
NOTE:
Fiducials which classify a panel which is not for placement (bad inkspot) are NOT seen as bad
fiducials, which need to be saved for analysis purposes!
SIPLACE Vision - Teaching Fiducials
Synthetic Inkspots Fiducials for Good/Bad Recognition of panels
Student Guide SIPLACE Vision (Customer)
Edition 12/2008 EN SIPLACE Vision - Teaching Fiducials
145
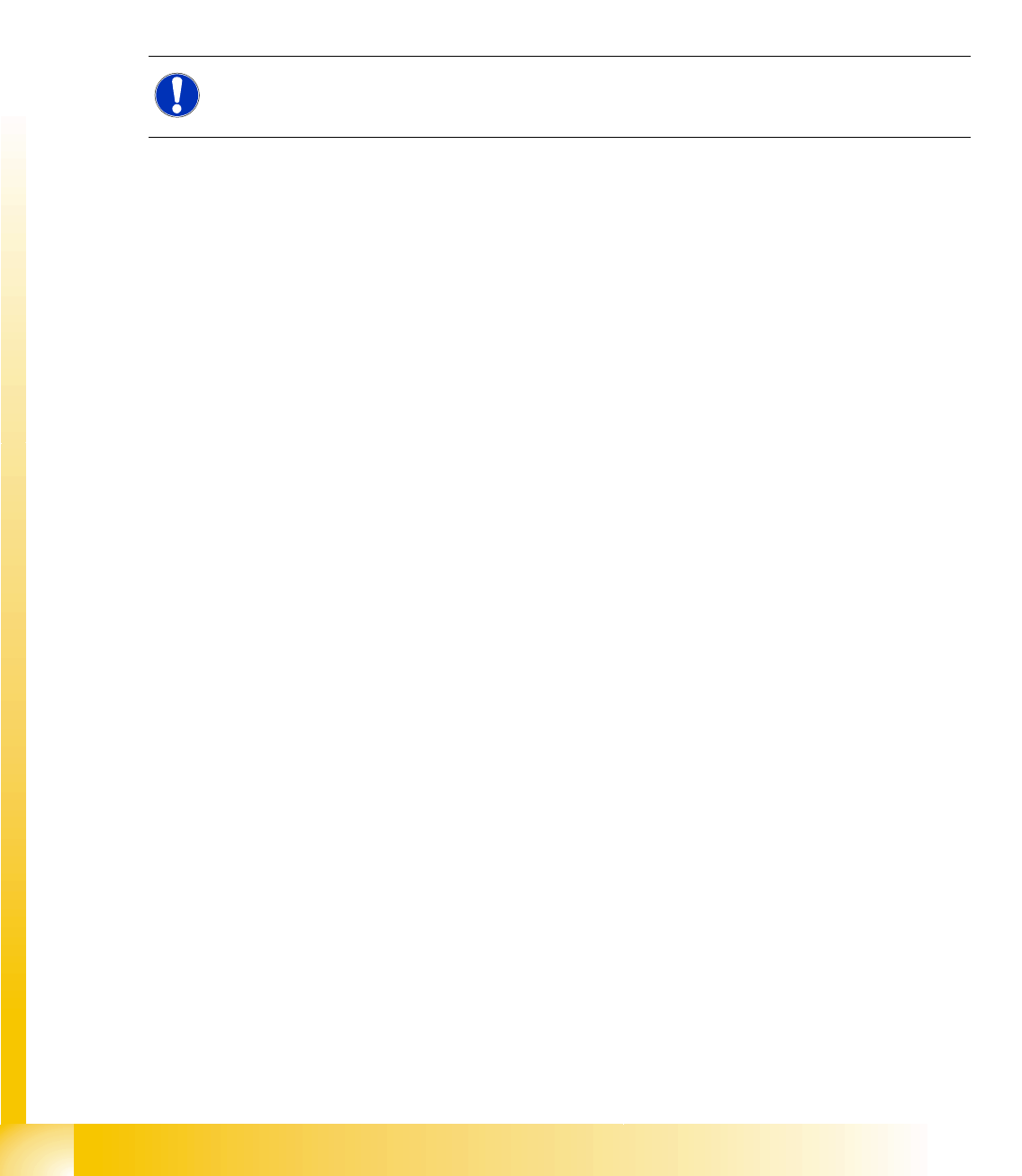
Features
6-12: Synthetic good/bad fiducials (inkspots)
The model is assigned a geometric description
(circle, rectangle, diamond). Teaching is not
required. That makes this method the most
convenient for the operator, which is why it is
recommended as a standard procedure. (If the
precentering step (1) fails, the fine centering
process will not be continued (2) and "do not
place" will be issued).
This method only evaluates the outer contours
of the fiducial. It is therefore not susceptible
towards fluctuations in brightness and
contrast.
During classification, the fiducial is searched
for in a defined search area (see position
correction for fiducials). It does not need to be
in the same position in the camera image as it
is for teaching. This enables conveyor
tolerances to be compensated.
The algorithm has been optimized for position
finding purposes and less for placement
classification. The algorithm is therefore not
suitable for applications in which interfering
structures with similar contours are located in
the vicinity of the fiducial i.e. especially when
the bad case can not be differentiated from the
good case by looking at differences in the
outer contours alone. This can be the case
with laser engraving or incomplete blacking
out with a marker pen.
If the same geometric shape is used both for
position recognition and for good/bad
classification, you will need to create the fiducial
shape twice in SIPLACE Pro: (so that the relevant
teaching position can be opened in SIPLACE
Vision).
1. Position 1 mm square
2. Bad mark 1 mm square
For illumination settings and algorithms, refer to
the explanations of position fiducials.