MAN00000772_SI-G200BB_SVCPDFA.pdf - 第625页
4. Basic Operations of the Multifunctional Mounter TFGB-10101-0 1 SI-G200 (B Head) Overview SHEET 10/20 When global recognition is co nducted, part data is also shared by individual recognition. However , the set values …
4. Basic Operations of the Multifunctional Mounter
TFGB-10101-01
SI-G200 (B Head) Overview
SHEET
9/20
4-4-2 Global Recognition
Up to eight parts displayed in a picture taken by the Large view of the fixed camera are recognized. With
global recognition selected, the number of rotating operations of the turret and that of pictures taken are
decreased, thereby improving production takt time.
Global recognition is conducted with the center of the turret placed in the center position of the Large view
of the fixed camera.
The RT axis conducts global recognition with Index1 being below the H axis. At this time, recognition is
conducted with the H axis not descending.
[Scope of Application]
Global recognition can be conducted only for parts that meet the conditions for both part sizes and part
types based on shapes.
Global recognition can be conducted only for parts in Category A (□10 mm, part thickness: 6.5 mm or
less).
For the types (shapes) of parts for which global recognition can be conducted, see the table below.
Parts for Which Global Recognition Can Be Conducted and Other Conditions
Part Types Based on Shapes
Whether Recognition
Can Be Conducted
Other Conditions
Chip part O -
Lead part O (partly)
The number of lead sets is less than three, the number of leads
per set is less than five, and the width of a lead is 0.3 mm or
more at the same time.
BGA part × -
Odd-shaped part (with leads) × -
Odd-shaped part (without leads) × -
Odd-shaped part (with balls) × -
[Setting Method]
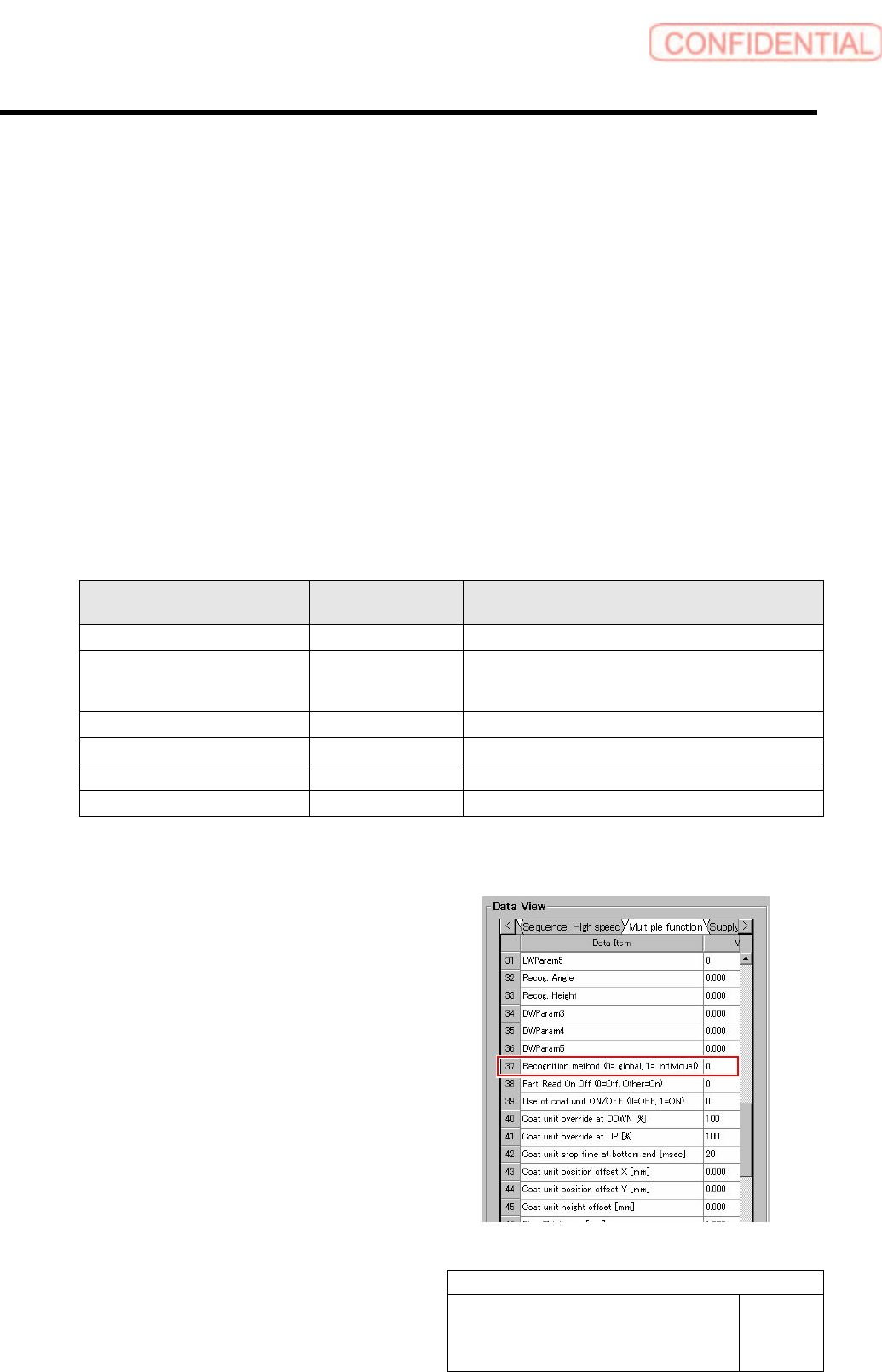
The setting for whether global recognition is
conducted is configured for part data.
When you set “0” for “Recognition Method” in
“Sequence (Multifunction)” displayed after
selecting “Data Editing” and “Part Management”
in this order, global recognition is conducted.
4. Basic Operations of the Multifunctional Mounter
TFGB-10101-01
SI-G200 (B Head) Overview
SHEET
10/20
When global recognition is conducted, part data is also shared by individual recognition. However, the set
values in the table below are automatically applied to the items to be set below, regardless of the already
set values.
Set Values Applied Automatically When Global Recognition Is Conducted
Items to Be Set Location Set Values to Be Applied
Field of view of the fixed camera Sequence (multifunction) Fixed camera (Large view)
Accuracy level Sequence (multifunction) 0 (normal)
Recognition angle specification Sequence (multifunction) OFF
Lighting pattern Sequence (multifunction) Defined in machine data
- When global recognition is conducted, the Large view of the fixed camera is used. (The camera defined
in part data is for individual recognition.)
- For the lighting pattern used for global recognition, values defined in “Vision Parameter” displayed after
“Machine Setup” has been selected are used. (The lighting pattern defined in part data is for individual
recognition.)
- Retrial of recognition of parts for global recognition is conducted as global recognition.
[Restrictions on Global Recognition Operations]
Even parts for which global recognition has been set may not be recognized globally, depending on
operating conditions. (They may be handled forcibly as parts for individual recognition.) Cases where
global recognition is not conducted are shown below.
- When multiple part types based on shapes for which global recognition has been set exist in one path
Among the part types in part data, only three types can be recognized globally.
Part Types Recognized Globally and Internal Recognition Method
Types Part Types Based on Shapes Lead Shapes Priority Order
1 Chip part - 1
2 Lead part Gull-wing 2
3 Lead part J-Lead 3
In one global recognition operation (in one path), only one part type can be recognized globally.
Therefore, when multiple part types exist in one path, global recognition is conducted only for one part
type to which most of the existing parts belong. Parts that do not belong to the part type are individually
recognized forcibly.
When the same number of parts belong to each of the part types in one path, global recognition is
conducted according to the priority order.
- Parts whose recognition method and Accuracy level have been set as global recognition and high
Accuracy, respectively, are globally recognized preferentially and then mounted. However, they are
mounted in an antibacklash operation.
4. Basic Operations of the Multifunctional Mounter
TFGB-10101-01
SI-G200 (B Head) Overview
SHEET
11/20
- Mounting of globally recognized parts in a recovery path
In a recovery path, globally recognized parts are forcibly switched to individually recognized ones, and
operations set in motion data are performed for them.
- When multiple part types based on shapes exist in one path, downloading machine model data causes a
warning message to appear.
<Points to Note>
- Concerning part data in which Gull-wing and J-lead coexist, the shape of a lead group at the top is
applied.
- Creation and editing of parts for global recognition with recognition data editing software used is
conducted with individual recognition used.
- Recognition check in automatic production, operating conditions, and teaching is conducted with global
recognition used.
4-4-3 Split Recognition
Split recognition can be conducted for lead parts, BGA parts, odd-shaped parts (with leads), and
odd-shaped parts (without leads).
<Points to Note>
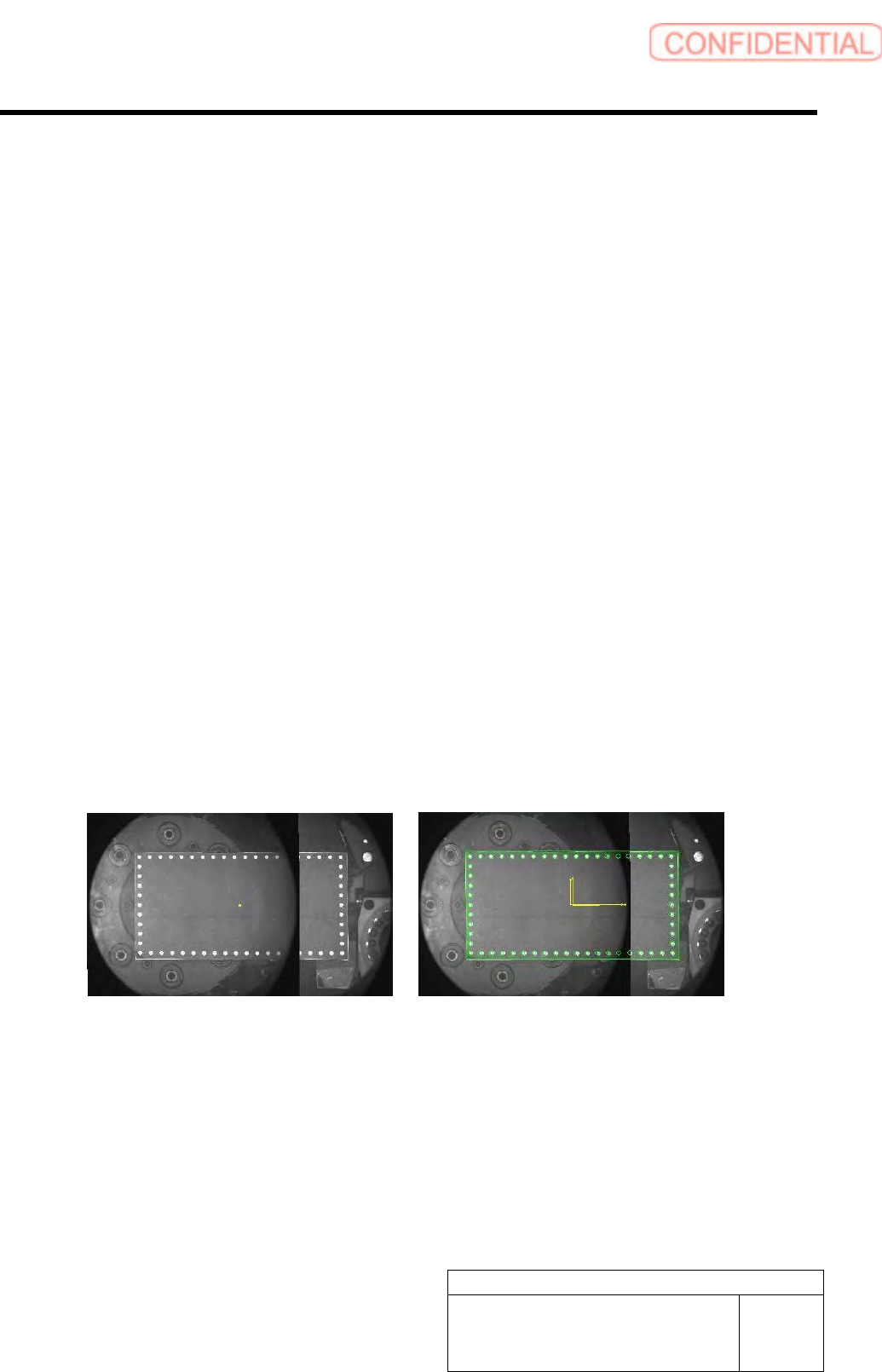
When the fixed camera (Large view) is used, there is a circular portion that is not imaged (portion where
lighting is unstable) at both ends of a split image. Therefore, part recognition data cannot be created
automatically. In this case, manual creation of part recognition data and recognition test need to be
repeated.
Left: Result of Composition of Split Images of a Virtual Part (100 x 50 mm),
Right: Result of Recognition