SI-G200MK7_操作说明.pdf - 第167页
操作編 电子零件贴装机 SI-G200MK7 系列 1-99 由对话框的 移動模式 ( 移动模式 ) 框中,点击 絕對座標移動 ( 绝对坐标移动 ) 、 相對座標移動 ( 相对坐标移动 ) 、 微調動作移動 ( 微调动作移动 ) 任一希望的钮。 在绝对坐标移动及相对坐标移动的各个对话框中,输入到达位置或移动量的数值,在移动输入的值后, 表示出 RN · H 轴的值,与 軸操作 ( 轴操作 ) 标签画面上表示的 RN · H 轴的值有误差…
操作編
电子零件贴装机 SI-G200MK7 系列
1-98
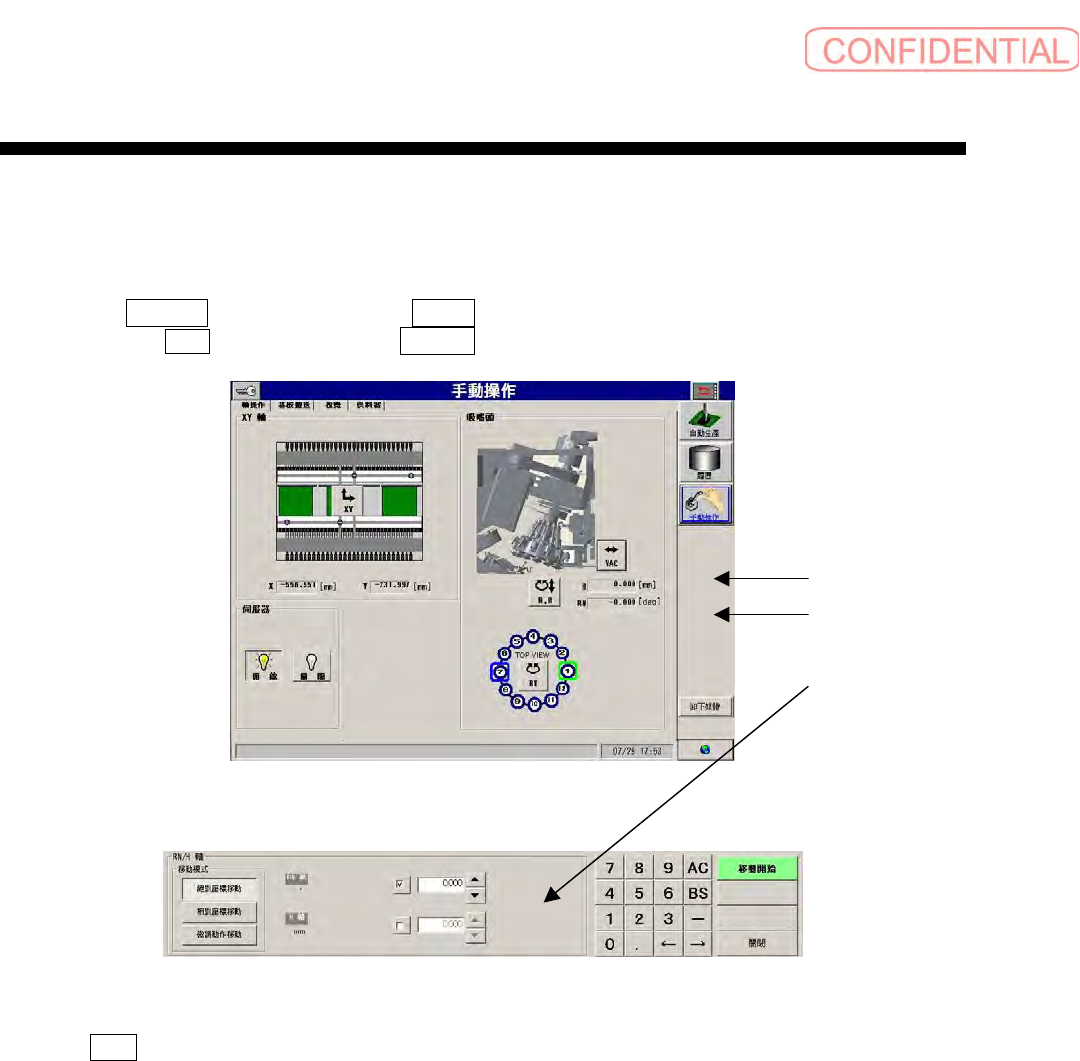
3.1.2 吸嘴 RN 及 H 轴的操作
[概要]
吸嘴 RN 轴为执行吸嘴本身的旋转动作。
[ 操作顺序]
依顺序点击 手動操作 ( 手动操作) 菜单 → 軸操作 ( 轴操作) 标签。
点击画面右边的 R . H 钮, 会出现以下的 RN/H 軸 (RN/H 轴) 对话框○
3
。
图 3.1.2-1 手
動操作- 軸操作 ( 手动操作- 轴操作) 画面
图 3.1.2-2 R/H 軸
[軸操作画面の説明]
RH 轴与 H 轴 现在位置的表示在喷嘴图文本框中的①②。此文本框中无法输入数值。
角度的单位是 deg、距离的单位是 mm 。
①
②
③
操作編
电子零件贴装机 SI-G200MK7 系列
1-99
由对话框的 移動模式 (移动模式) 框中,点击 絕對座標移動 (绝对坐标移动) 、 相對座標移動
(相对坐标移动) 、 微調動作移動 (微调动作移动) 任一希望的钮。
在绝对坐标移动及相对坐标移动的各个对话框中,输入到达位置或移动量的数值,在移动输入的值后,
表示出
RN·H 轴的值,与 軸操作 (轴操作) 标签画面上表示的RN·H 轴的值有误差时,请参照表示在
軸操作 (轴操作) 标签画面上RN·H 轴的值为实际位置。
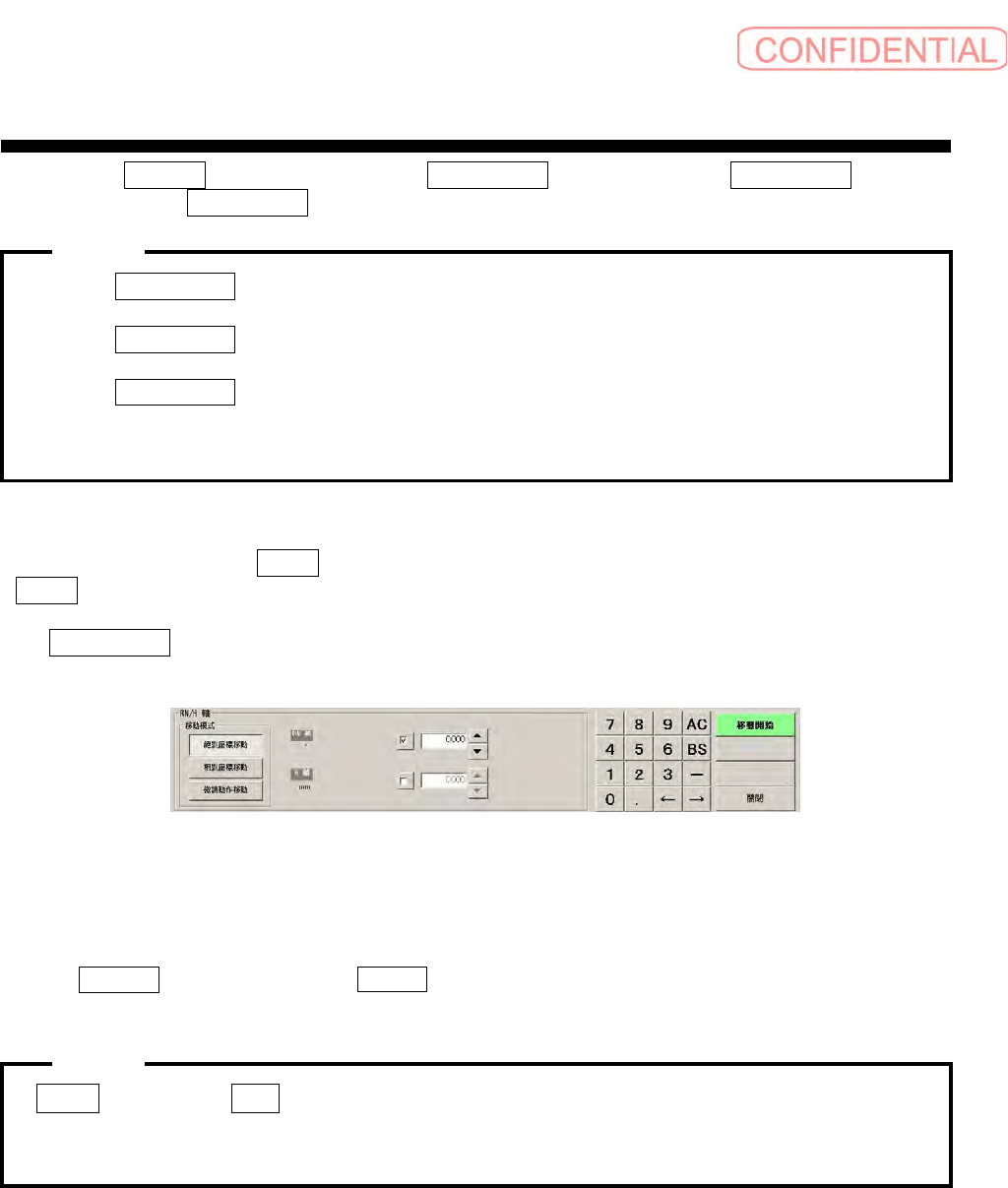
(1) 絕對座標移動
(绝对坐标移动)
吸嘴 RN 轴及 H 轴的绝对坐标移动的顺序如下
图 3.1.2-3 绝对坐标移动
[1] 点击欲移动轴的复选框。
[2] 输入移动处的位置于文本框中。
[3] 按 移動開始 钮后、按操作面板的
START 钮。
→ 移动指定的轴。
· 所谓 絕對座標移動
(
绝对坐标移动
)
为将
SI-G200MK7
的基准点当原点,往目标点移动。
无论现在位置在何处,均会移动至目标点。
· 所谓 相對座標移動
(
相对坐标移动
)
为以现在位置当起始点,只移动指定的距离。即使相同
移动距离
,
若现在位置不同时, 其到达位置亦会不同。
· 所谓 微調動作移動
(
微调动作移动
)
为使用游标来执行
XY
轴移动。按游标时会立即微动,
连续按时即连续移动。
·
吸嘴
RN
轴由上面看时, 顺时针旋转为正
( + )
方向。
注意:
RN 軸 ( RN 轴) 及 H 軸 ( H 轴) 不能同时确认。
→ 点击轴的文本框中尽量输入数值。
轴动作中画面锁定, 无法执行输入等动作。
注意:
操作編
电子零件贴装机 SI-G200MK7 系列
1-100
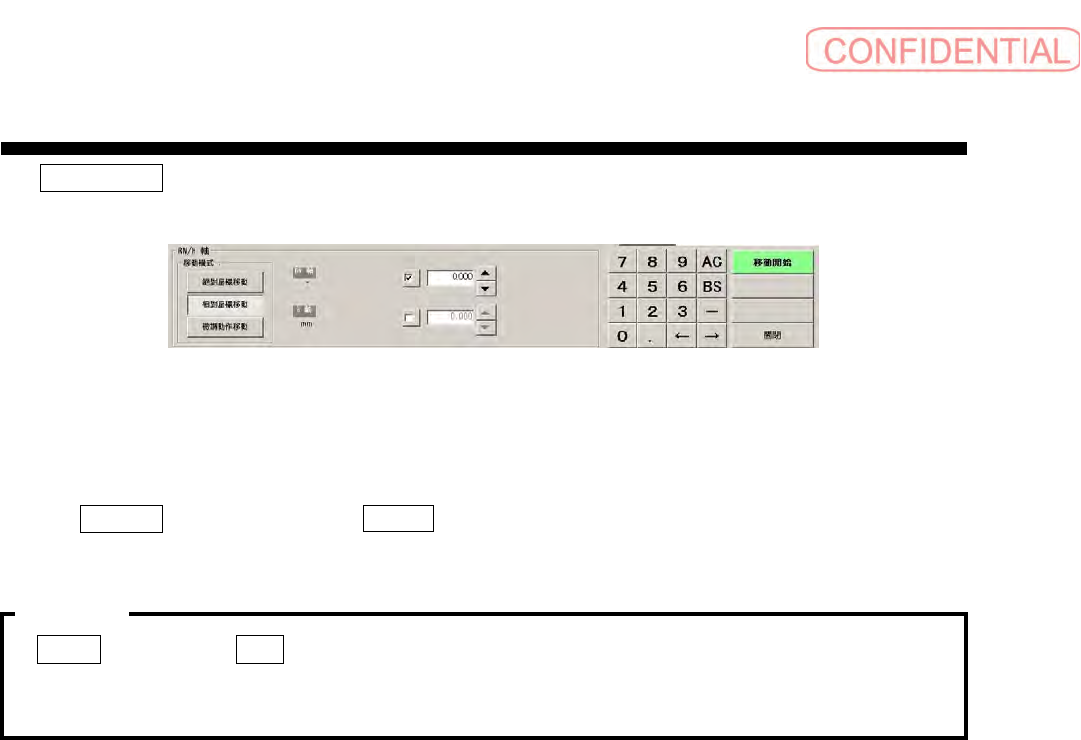
( 2 ) 相對座標移動 ( 相对坐标移动)
吸嘴 RN 轴及 H 轴的相对坐标移动的顺序如下。
图 3.1.2-4 相对坐标移动
[1] 点击欲移动轴的文本框。
[2] 输入现在位置的相对移动量于文本框中。
[3] 按 移動開始 钮后、按操作面板的
START 钮。
→ 移动指定的轴。
RN 軸 ( RN 轴) 及 H 軸 ( H 轴) 不能同时确认。
→ 点击轴的文本框中尽量输入数值。
轴动作中画面锁定, 无法执行输入等动作。
注意: