SI-G200MK7_操作说明.pdf - 第226页
操作篇 电 子零件 贴装 机 SI-G200MK7 系列 1-158 零件边长 1 ~ 2 : 输入角形零件的尺寸。关于焊脚形零件,输入不包含焊脚部的零件尺寸。 单位:mm 设定范围:0.001~25 极性 : 指定零件的左右/上下电极的极性(+/-)的有无。零件有极性时,选择右上/右下/左下/左上其中的一处。零 件没有极性时,不选择 零件厚度 : 输入零件的厚度。 单位:mm 设定范围:0.001~8(高速贴装头) 、0.001~13…
操作篇
电子零件贴装机 SI-G200MK7 系列
1-157
1.2 零件生成向导
1.2.1 基本信息画面
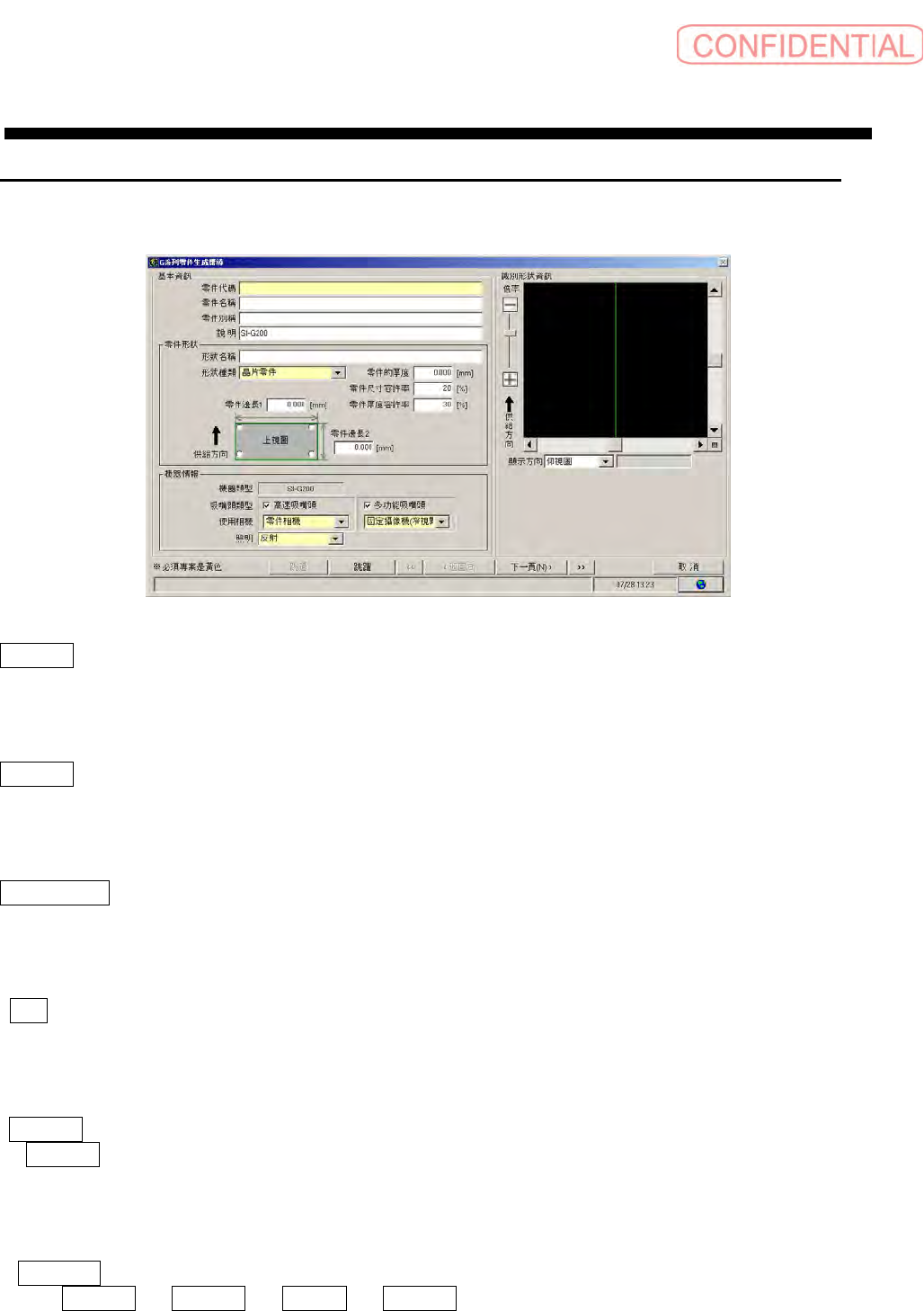
图 1.2.1-1 零件生成向导-基本信息画面
零件代码 :
输入识别零件的独特的文字列。机器类型不同时,可以使用同一零件代码。
上限值:128 文字
可使用文字(CODE39):[ A-Z ][ 0-9 ][ 空格 ][ 句号 ][ - ][ $ ][ / ][ + ][ % ]
零件名称 :
输入零件的一般名称。
上限值:255 文字
不能用的文字:[ , ][ ; ][ " ][全角文字 ]
零件别的名称 :
输入零件的第二名称。
上限值 :255 文字
不能用的文字:[ , ][ ; ][ " ][全角文字 ]
说明 :
输入说明。
上限值:255 文字
不能用的文字:[ , ][ ; ][ " ][全角文字 ]
零件形状 :
形状名称 :
输入形状的一般名称。
上限值 :255 文字
不能用的文字:[ , ][ ; ][ " ][全角文字 ]
形状种类 :
从 芯片零件 、 焊脚零件 、 BGA零件 、 异形零件 中选择零件的形状种类。
操作篇
电子零件贴装机 SI-G200MK7 系列
1-158
零件边长 1~2 :
输入角形零件的尺寸。关于焊脚形零件,输入不包含焊脚部的零件尺寸。
单位:mm
设定范围:0.001~25
极性 :
指定零件的左右/上下电极的极性(+/-)的有无。零件有极性时,选择右上/右下/左下/左上其中的一处。零
件没有极性时,不选择
零件厚度 :
输入零件的厚度。
单位:mm
设定范围:0.001~8(高速贴装头)、0.001~13(多功能贴装头)
零件尺寸容许率 :
输入识别零件尺寸时的容许率。
单位:%
设定范围:1~99
零件厚度容许率 :
输入吸着检查识别时零件厚度的容许率。
单位:%
设定范围:1~99
机器信息 :
机器类型 :
表示使用零件的机器类型。
贴装头类型 :
选择所用机器的贴装头类型。选择操作登录零件的贴装头类型,不要选择不被使用的贴装头类型。
使用相机 :
选择识别零件的相机
零件相机 : 移动相机
固定相机 :固定相机
固定相机 (小视野) :小视野的固定相机
固定相机 (大视野) :大视野的固定相机
照明 :
从 反射 、透射 两者里选择识别零件的照明。
・
黄色的区域是必须项目。
注意∶
操作篇
电子零件贴装机 SI-G200MK7 系列
1-159
1.2.2 焊脚信息画面
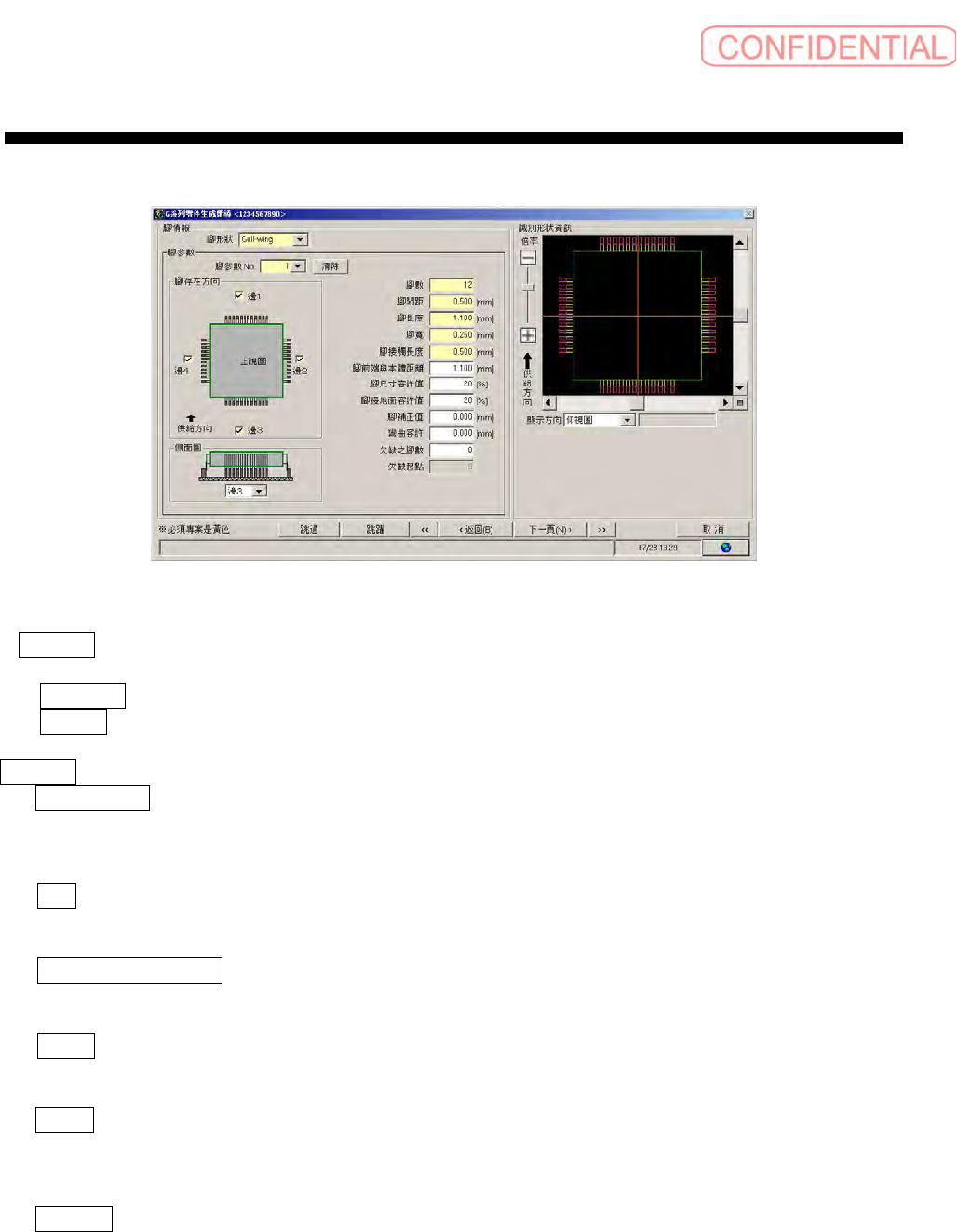
图 1.2.2-1 零件生成向导-焊脚信息画面
焊脚形状 :
选择焊脚形状。
Gull-wing : Gull-wing 形焊脚
J-lead : J-lead 形焊脚
焊脚参数 :
焊脚参数编号 :
1 种的零件最多可选择 6 种参数。即使边不等,数据相同的话,只要指定所在方向就可使用。焊脚参数分组
输入,各种数据按焊脚参数输入。
清除 :
删除被指定的焊脚参数。
焊脚存在方向
1~4 边 :
每个焊脚参数,选择零件各边里焊脚的有无。各个方向里有焊脚时,那方向的边要选中。没有焊脚的边不要
选中。
侧面图 :
表示被选择边的侧面图。
焊脚数 :
输入 1 组内实际存在的焊脚的数量。
设定范围:1~999
焊脚间距 :
输入焊脚的中心距离。1 组内只有 1 个焊脚时,焊脚间距被显示为 0[mm]。
单位:mm
设定范围 0/0.001~99.999※
※ 1 组内只有 1 个焊脚时,焊脚间距表示为 0[mm]。