SI-G200MK7_操作说明.pdf - 第254页
操作篇 电 子零件 贴装 机 SI-G200MK7 系列 1-186 零件识别错误时, 设定再次执行识别的次数。即使反复至指定次数亦为认 识错误时, 将其零件废弃, 再次开始吸着零件动作。 设定范围:0~9 (10) 吸嘴停留时间(吸着时) 为确实吸着动作, 输入在吸着位置 ( 下降位置 ) 停止的时间。 单位:msec 设定范围:0~9999 (11) 吸嘴停留时间(贴装时) 为确实吸着动作, 输入在贴装位置 ( 下降位置 ) 停止的…
操作篇
电子零件贴装机 SI-G200MK7 系列
1-185
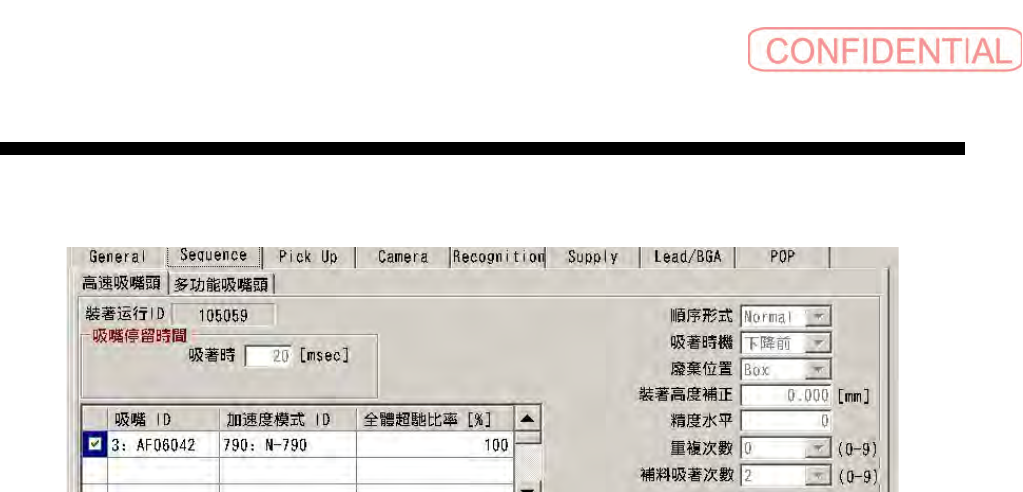
1.3.2 Sequence
Sequence 表示贴装运行的数据。贴装运行数据收集了吸嘴从零件供料器吸着零件到贴装在基板时所需要的数据。
图 1.3.2-1 Sequence 画面 (高速贴装头)
(1) 贴装头类型标签
复数个类型的贴装头可使用时,选择设定零件信息对象的贴装头信息。
(2) 贴装运行 ID
表示代表贴装运行的 ID 编号。
(3) 顺序形式
指定吸着时的动作顺序。
Normal:吸嘴下降的同时打打开供料器的遮蔽器的通常操作(重叠影像动作)
Safety: 对于较高的零件,依打开遮蔽器→ 吸嘴下降→ 吸着→ 吸嘴上升→ 遮蔽器关闭的顺序执行的安
全动作。
(4) 吸着时机
选择吸着时执行真空阀动作的时间。
下降前
: 吸着吸嘴下降前真空阀动作
下降后
: 吸着吸嘴下降后真空阀动作( 顺序形式仅为 Safety 时可设定)
(5) 贴装高度补正
输入贴装位置的高度方向的补正值。
单位:mm
设定范围:-999.999~999.999
(6) 精度水平
适合贴装时需要高定位精度的零件。
0 : 一般精度
1 : 高精度
(7) 废弃位置
指定零件的废弃位置
Box
: 废弃框里废弃。
Conveyor
:废弃输送带里废弃。
(8) 补料吸着次数
未吸着或站立吸着的吸着失败,连续发生时,指定允许发生错误的次数。未吸着零件为缺料错误发生、站立吸
着为供料器不良错误发生
设定范围:0~9
(9) 重复次数

操作篇
电子零件贴装机 SI-G200MK7 系列
1-186
零件识别错误时, 设定再次执行识别的次数。即使反复至指定次数亦为认
识错误时, 将其零件废弃, 再次开始吸着零件动作。
设定范围:0~9
(10) 吸嘴停留时间(吸着时)
为确实吸着动作, 输入在吸着位置
(下降位置) 停止的时间。
单位:msec
设定范围:0~9999
(11) 吸嘴停留时间(贴装时)
为确实吸着动作, 输入在贴装位置
(下降位置) 停止的时间。
单位:msec
设定范围:0~9999
(12) 吸嘴
ID
选择使用吸嘴编号。(最多 16 种)
(13) 加速度模式
ID
选择使用的加速度模式 ID。加速度模式取决于机器数据。
(14) 全体超驰比率
输入全体范围的超驰比率。
操作篇
电子零件贴装机 SI-G200MK7 系列
1-187
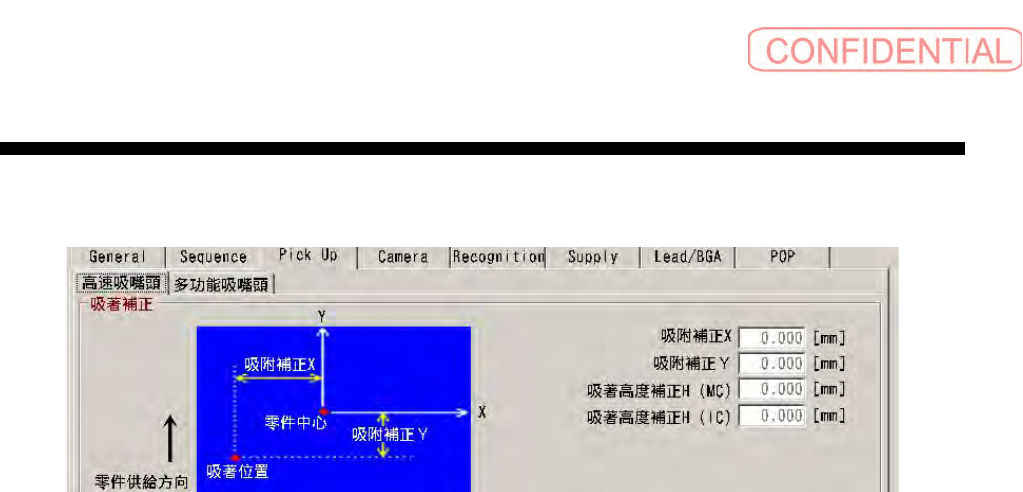
1.3.3 Pick Up
Pick Up 表示吸着补正数据。吸着补正数据收集了吸嘴从零件供料器吸着零件时所需要的数据。
图 1.3.3-1 Pick Up 画面 (高速贴装头)
(1) 贴装头类型
复数个类型的贴装头可使用时,选择设定零件信息对象的贴装头信息。不显示不能够选择的贴装头。
(2) 吸着补正 XY
欲吸着的位置为零件中心以外时,输入由零件中心偏移吸着位置的XY方向的补正量。
X 为右方向+ 、左方向- 。Y 为上方向+ 、下方向-
单位:mm
设定范围:-999.999~999.999
(3) 吸着高度补正 H(MC)
输入机械供料器用的吸着位置的高度方向的补正值。上方向为正方向,下方向为负方向。
单位:mm
设定范围:-999.999~999.999
(4) 吸着高度补正 H(IC)
输入智能供料器用的吸着位置的高度方向的补正值。上方向为正方向,下方向为负方向。
单位:
mm
设定范围:-999.999~999.999