PW6001_user_manual_chi_20191018H.pdf - 第178页
172 使用 D/A 输出 (仅限于带马达 &D/A 型号) (模拟输出与波形输出) : 输出电压带有极性 输出选择项目 标记 极性 额定输出电压 基波视在功率 Sfnd 与视在功率 (S) 相同 无功功率 Q 与有功功率 (P) 相同 基波无功功率 Qfnd 与有功功率 (P) 相同 功率因数 λ 相对于功率因数 ± 1 为 DC ± 5 V 基波功率因数 λ fnd 相对于基波功率因数 ± 1 为 DC …
171
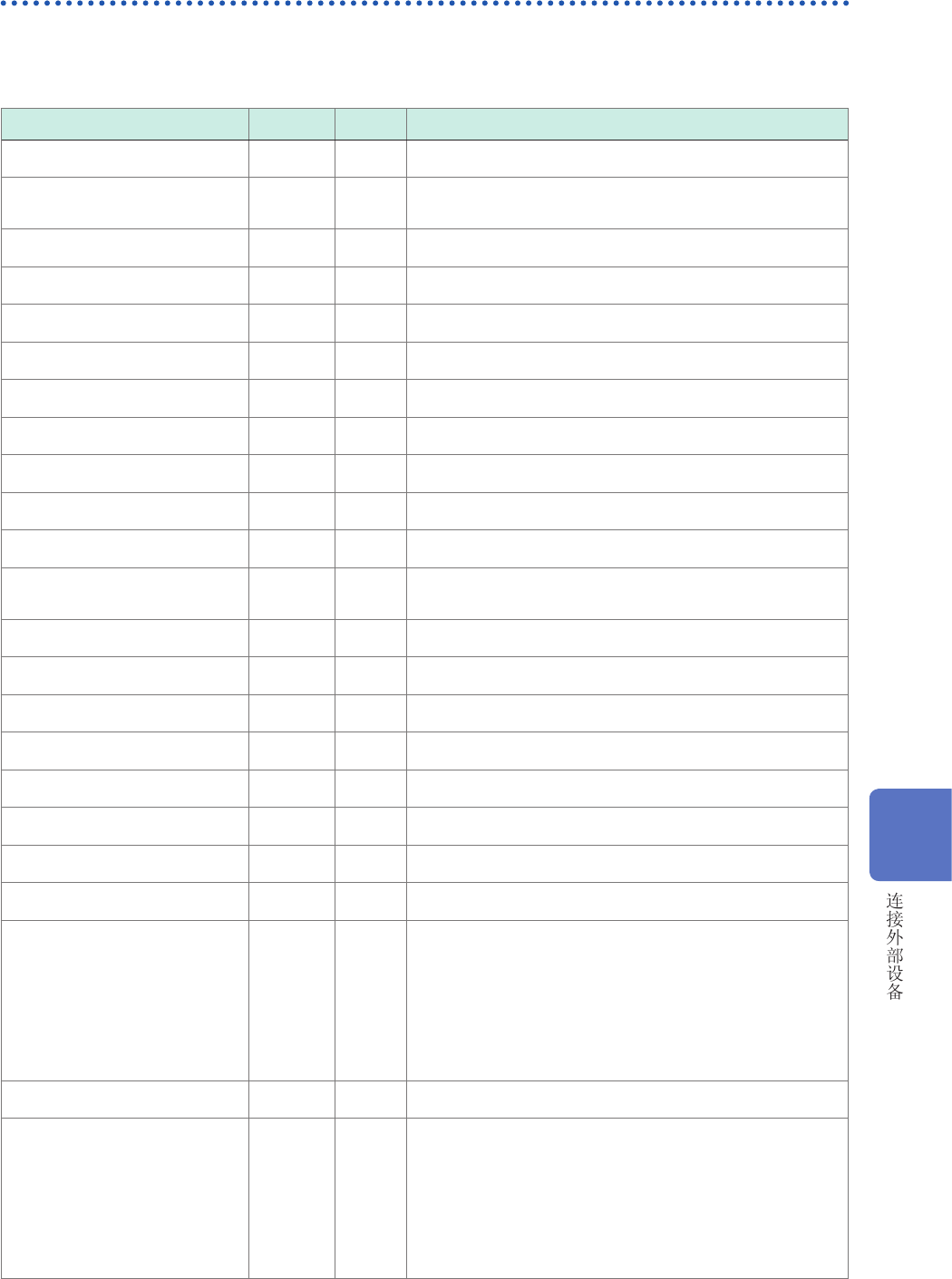
使用 D/A 输出(仅限于带马达 &D/A 型号)(模拟输出与波形输出)
输出速率
模拟输出用于输出针对满量程的 DC±5 V 电压。
满量程用于输出下表所示的电压。
:输出电压带有极性
输出选择项目
标记 极性 额定输出电压
电压有效值 Urms 相对于量程的 0 ~ 100% f.s.为 DC0 V ~ +5 V
电压平均值整流
有效值换算值
Umn 相对于量程的 0 ~ 100% f.s.为 DC0 V ~ +5 V
电压交流成分 Uac 相对于量程的 0 ~ 100% f.s.为 DC0 V ~ +5 V
电压简单平均值 Udc
相对于量程的
0 ~ 100% f.s.为 DC±5 V
电压基波成分 Ufnd 相对于量程的 0 ~ 100% f.s.为 DC0 V ~ +5 V
电压波形峰值 + Upk+
相对于量程的 ±
300%f.s.为 DC±5 V
电压波形峰值 - Upk-
相对于量程的
0 ~ 300% f.s.为 DC±5 V
总谐波电压失真率 Uthd 相对于 0 ~ 500% 为 DC0 V ~ +5 V
电压纹波率 Urf 相对于 0 ~ 500%为 DC0 V ~ +5 V
电压不平衡率 Uunb 相对于 0 ~ 100%为 DC0 V ~ +5 V
电流有效值 Irms 相对于量程的 0 ~ 100% f.s.为 DC0 V ~ +5 V
电流平均值整流
有效值换算值
Imn 相对于量程的 0 ~ 100% f.s.为 DC0 V ~ +5 V
电流交流成分 Iac 相对于量程的 0 ~ 100%f.s.为 DC0 V ~ +5 V
电流简单平均值 Idc
相对于量程的 ±
100%f.s.为 DC±5 V
电流基波成分 Ifnd 相对于量程的 0 ~ 100% f.s.为 DC0 V ~ +5 V
电流峰值 + Ipk+
相对于量程的 ±
0 ~ 300% f.s.为 DC±5 V
电流峰值 - Ipk-
相对于量程的 ±
0 ~ 300% f.s.为 DC±5 V
总谐波电流失真率 Ithd 相对于 0 ~ 500%为 DC0 V ~ +5 V
电流纹波率 Irf 相对于 0 ~ 500% 为 DC0 V ~ +5 V
电流不平衡率 Iunb 相对于 0 ~ 100%为 DC0 V ~ +5 V
有功功率 P
P1/P2/P3/P4/P5/P6 :电压量程 × 电流量程
P12/P34/P45/P56 :(电压量程 × 电流量程)×2
3V3A
、3P3W3M的 P123/P456 :(电压量程 × 电流量程)×2
3P4W
的 P123/P456 :(电压量程 × 电流量程)×3
例 :为 3P4W、P123、300 V量程、10 A量程时
300 V×10 A×3 = 9 kW为满量程
相对于 ±9 kW f.s.为 DC±5 V
基波有功功率 Pfnd
与有功功率
(P) 相同
视在功率
S
S1/S2/S3/S4/S5/S6
:电压量程 × 电流量程
S12/S34/S45/S56 :(电压量程 × 电流量程)×2
3V3A
、3P3W3M的 S123/S456 :(电压量程 × 电流量程)×2
3P4W
的 S123/S456 :(电压量程 × 电流量程)×3
例 :为 S34、150 V量程、10 A量程时
150 V×10 A×2 = 3 kW为满量程
相对于 0 ~ 3 kW f.s.为 DC0 V ~ +5 V
8
172
使用 D/A 输出(仅限于带马达 &D/A 型号)(模拟输出与波形输出)
:输出电压带有极性
输出选择项目 标记 极性 额定输出电压
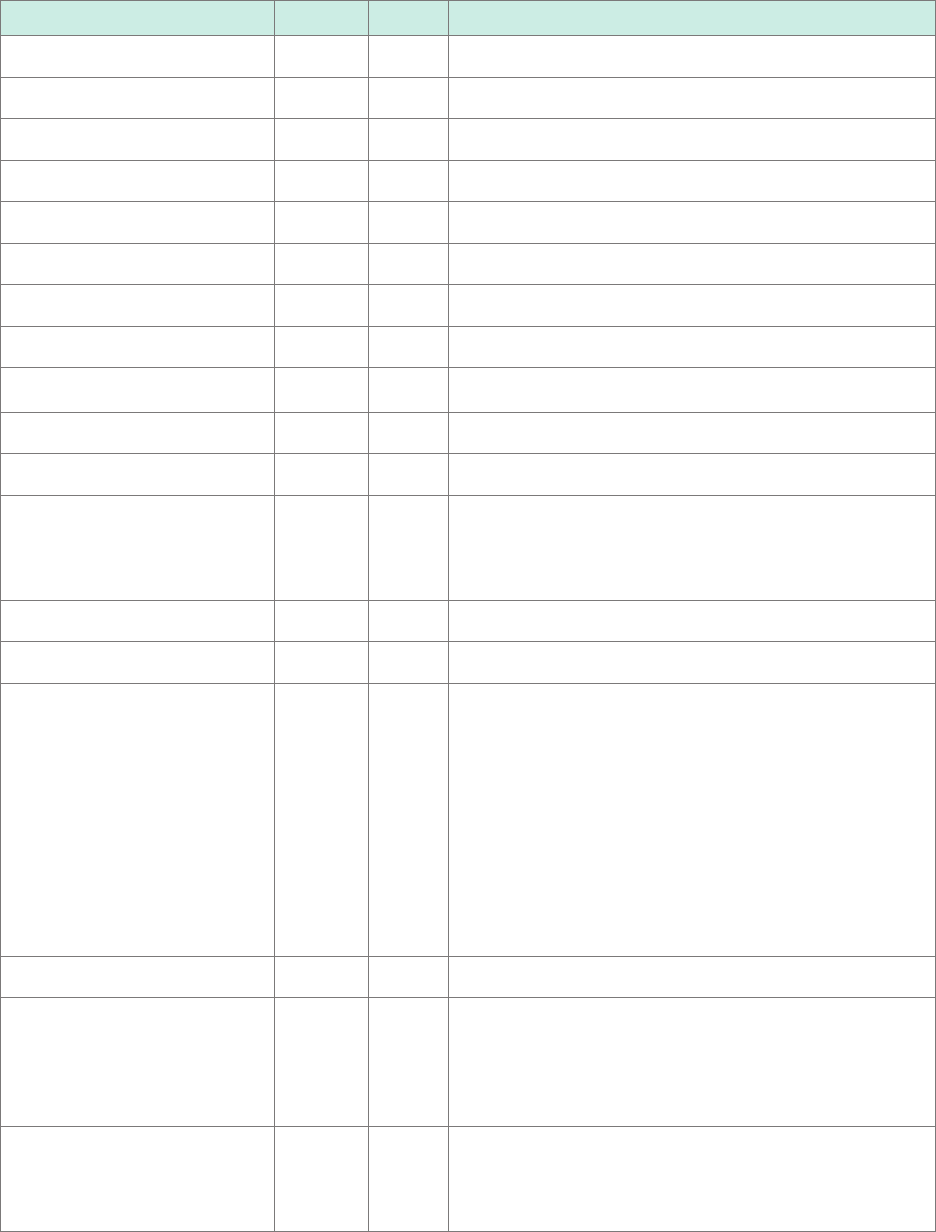
基波视在功率 Sfnd 与视在功率 (S) 相同
无功功率
Q
与有功功率
(P)相同
基波无功功率 Qfnd
与有功功率
(P)相同
功率因数
λ
相对于功率因数 ±1为DC±5 V
基波功率因数
λ
fnd
相对于基波功率因数 ±
1为 DC±5 V
电压相位角
θ
U
相对于电压相位角 ±
180°为 DC±5 V
电流相位角
θ
I
与电压相位角
(
θ
U)
相同
功率相位角
φ
与电压相位角
(
θ
U)
相同
频率 f 相对于上限频率设置为 DC+5 V
累计正向电流量 Ih+ 与累计正负向电流量和 (Ih) 相同
累计负向电流量 Ih-
*4
与累计正负向电流量和(Ih)相 同
累计正负向电流量和
Ih
电流量程 × 累计满量程
例 :在
10A量程下进行 1小时累计时,
10Ah为电流累计 f.s.
*2
相对于 ±10Ah为 DC±5V
累计正向功率量 WP+ 与累计正负向功率量和 (WP) 相同
累计负向功率量 WP-
*4
与累计正负向功率量和(WP)相 同
累计正负向功率量和
WP
WP1/WP2/WP3/WP4/WP5/WP6 :
电压量程 × 电流量程 ×累计满量程
WP12/WP34/WP45/WP56 :
(电压量程 × 电流量程 ×累计满量程)×2
3V3A
、3P3W3M的 WP123/WP456 :
(电压量程 × 电流量程 ×累计满量程)×2
3P4W
的 WP123/WP456 :
(电压量程 × 电流量程 ×累计满量程)×3
例 :在 WP123、300V 量 程、10A 量程下进行1 小时累计时,
9kWh为有功功率累计 f.s.
相对于 ±9kWh为 DC±5 V
效率 η 针对0 ~ 200%,为 DC0 V ~ +5 V
损耗值 Loss
Pin=Pin1+Pin2+Pin3+Pin4、
Pout=Pout1+Pout2+Pout3+Pout4
将 Pin与 Pout 中较大的一方设为 P 量程。
相对于 P量程的 ±100%为 DC±5 V
例:P 量程为 3 kW时,相对于 3 kW的±100% 为 DC±5 V
扭矩 Tq
模拟
DC输入 :电压量程 × 转换比值= 额定扭矩
相对于额定扭矩的 ±100%为 DC±5V
频率输入 :转换比值 =额定扭矩
针对额定扭矩的 ±100%,为 DC±5V
173
使用 D/A 输出(仅限于带马达 &D/A 型号)(模拟输出与波形输出)
输出选择项目 标记 极性 额定输出电压
转速
Spd
模拟
DC输入 :电压量程 × 转换比值= 额定转速
脉冲输入 :(60× 上限频率)/脉冲数设置值 =额定转速
相对于额定转速的 ±100%为DC±5 V
马达功率 Pm
相对于
Pm量程的 ±100%为±5 V
*3
转差率 Slip
相对于 ±
100%为±DC5 V
独立输入模式时的自由输入
CH*
*1
模拟 DC输入 :相对于电压量程的 ±100%为 DC±5 V
脉冲输入 :相对于上限频率的 ±100%为 DC±5 V
用户定义运算
UDF
相对于按用户定义运算设置的“
MAX”值 的 ± 100%,为
DC
±5 V
*1
:模拟 DC 输入具有极性。脉冲频率输入没有极性。
*2 :累计值超过 ±5 V时,模拟输出变为 0 V,并继续发生变化。
*3 :Pm 量程是在马达功率运算公式中,将额定扭矩代入到扭矩中,将额定转速代入到转速中计算得出的。
*4 :始终带有 -符号。
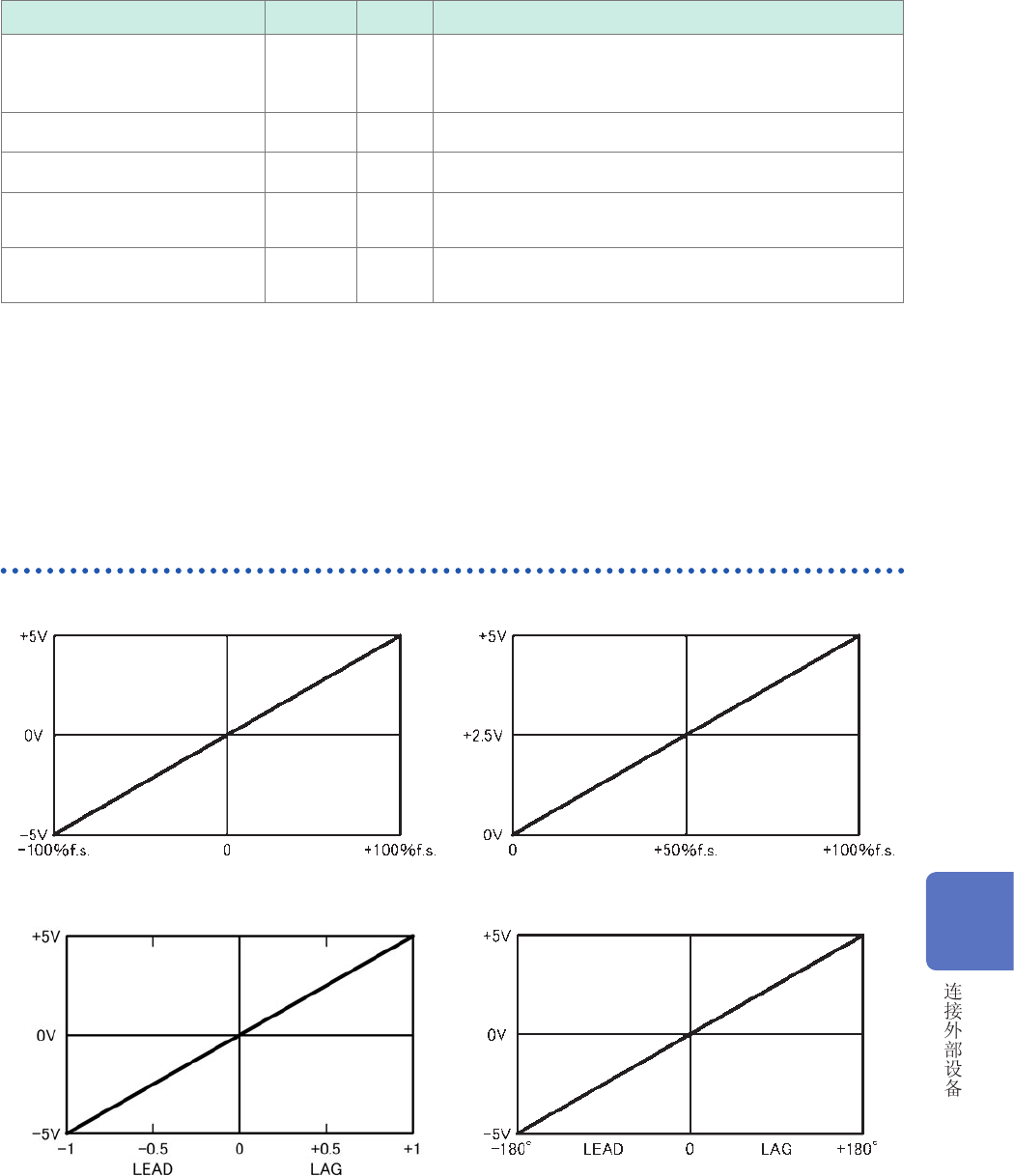
D/A输出示例
电压 /电流 (dc)、有效功率、无效功率 电压 /电流 (rms、mn、ac、fnd、unb)、视在功率
功率因数
电压 /电流 /功率相位角
8