PW6001_user_manual_chi_20191018H.pdf - 第240页
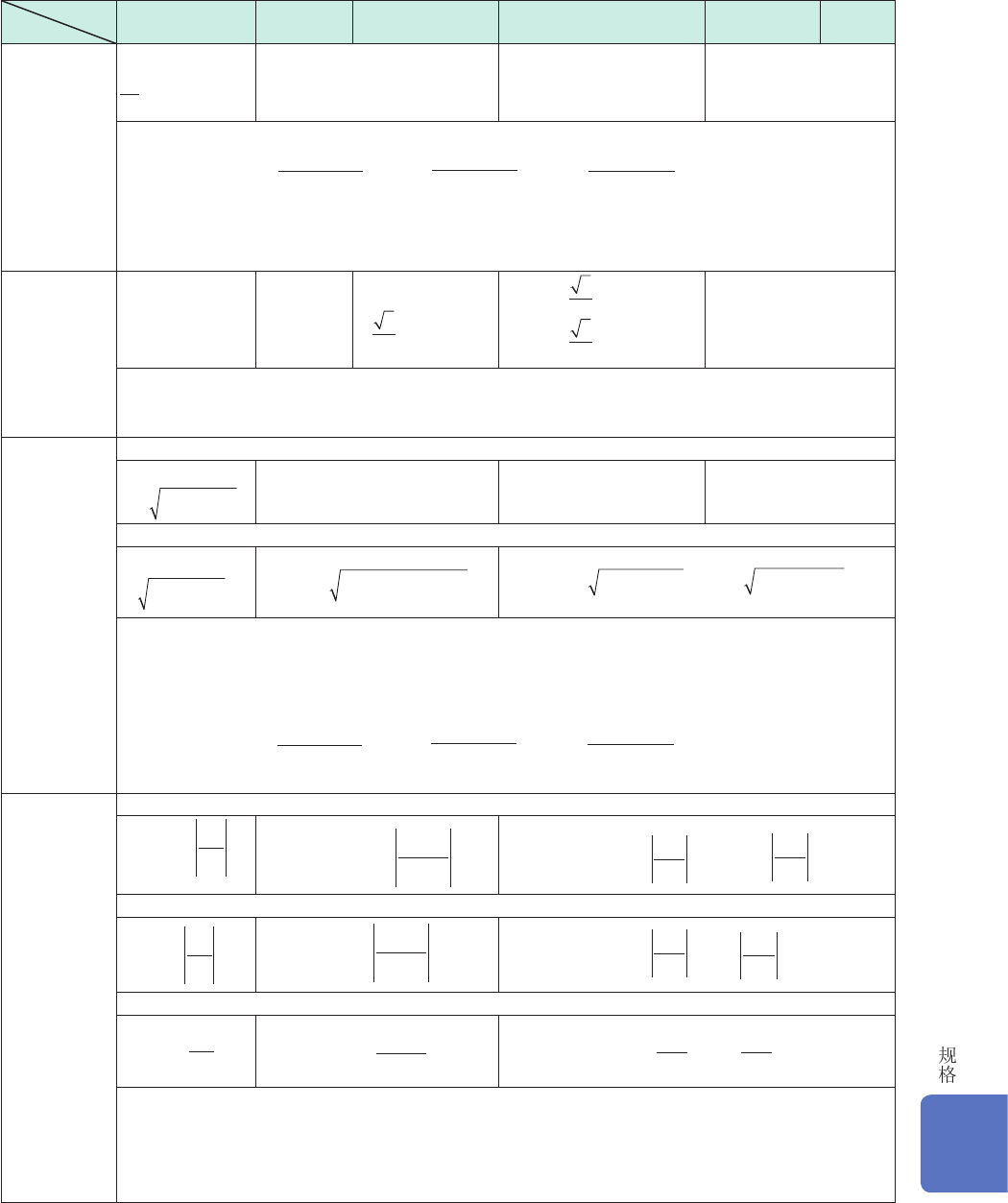
234 运算公式规格 接线设置 项目 1P2W 1P3W 3P3W2M 3V3A 3P3W3M 3P4W 功率相位角 选择运算公式 T ype1 时 φ (i) =si (i) cos -1 | λ (i) | φ (i)(i+1) =si (i)(i+1) cos -1 | λ (i)(i+1) | φ 123 =si 123 cos -1 | λ 123 | φ 456 =si 456 cos -1 | λ 456 | 选择运算公式…
233
运算公式规格
接线设置
项目
1P2W 1P3W 3P3W2M 3V3A 3P3W3M 3P4W
有功功率
P
(i)
=
1
0
1
M
UI
is is
S
M
() ()
-
×
()
=
∑
P
(i)(i+1)
=P
(i)
+P
(i+1)
P
123
=P
1
+P
2
P
456
=P
4
+P
5
P
123
=P
1
+P
2
+P
3
P
456
=P
4
+P
5
+P
6
•
为
3P3W3M与 3P4W 接线时,电压波形 U(i)s使用相电压。
U
UU
s
ss
1
13
3
=
−
()
U
UU
s
ss
2
21
3
=
−
()
U
UU
s
ss
3
32
3
=
−
()
3P3W3M :
, ,
•
为
3V3A接线时,电压
U
(i)
使用线电压。(3P3W2M 与 3V3A 的运算相同)
•
有功功率
P
的极性符号 :消耗时利用 (+P) 表示功率的潮流方向,再生时利用 (-P) 表示功率的潮流方
向
视在功率
S
(i)
=U
(i)
×I
(i)
S
(i)(i+1)
=
S
(i)
+S
(i+1)
S
(i)(i+1)
= +
()
()
+
()
3
2
1
SS
ii
S
123
=
3
3
(S
1
+S
2
+S
3
)
S
456
=
3
3
(S
4
+S
5
+S
6
)
S
123
=S
1
+S
2
+S
3
S
456
=S
4
+S
5
+S
6
•
U
(i)
与
I
(i)
从 rms/mn 中选择
•
3P3W3M与 3P4W 接线时,电压
U
(i)
使用相电压。
•
3V3A接线时,电压
U
(i)
使用线电压。
无功功率
选择运算公式
Type1 与 Type3 时
Q
(i)
=
Si
(i)
SP
ii
() ()
−
22
Q
(i)(i+1)
=Q
(i)
+Q
(i+1)
Q
123
=Q
1
+Q
2
Q
456
=Q
4
+Q
5
Q
123
=Q
1
+Q
2
+Q
3
Q
456
=Q
4
+Q
5
+Q
6
选择运算公式 Type2 时
Q
(i)
=
SP
ii
() ()
−
22
Q
(i)(i+1)
=
SP
ii ii
()
+
() ()
+
()
−
1
2
1
2
Q
123
=
SP
123 123
22
−
、
Q
456
=
SP
456
2
456
2
−
•
运算公式
Type1 与 Type3时的无功功率
Q
的极性符号
si
表示超前与滞后的极性,符号[ 无 ] 表示滞后
(LAG)
,符号 [-]表示超前 (LEAD)。
•
极性符号
si
(i)
取自各测量通道
(i)
的电压波形
U
(i)s
与电流波形
I
(i)s
的超前与滞后。
•
为
3P3W3M与 3P4W 接线时,电压波形
U
(i)s
使用相电压。
U
UU
s
ss
1
13
3
=
−
()
U
UU
s
ss
2
21
3
=
−
()
U
UU
s
ss
3
32
3
=
−
()
3P3W3M :
, ,
•
选择运算公式
Type2 时,不带极性符号。
功率因数
选择运算公式
Type1 时
λ
(i)
=Si
(i)
P
S
i
i
()
()
λ
(i)(i+1)
=Si
(i)(i+1)
P
S
ii
ii
()
+
()
()
+
()
1
1
λ
123
=Si
123
P
S
123
123
、
λ
456
=Si
456
P
S
456
456
选择运算公式 Type2 时
λ
(i)
=
P
S
i
i
()
()
λ
(i)(i+1)
=
P
S
ii
ii
()
+
()
()
+
()
1
1
λ
123
=
P
S
123
123
、
λ
456
=
P
S
456
456
选择运算公式 Type3 时
λ
(i)
=
P
S
i
i
()
()
λ
(i)(i+1)
=
P
S
ii
ii
()
+
()
()
+
()
1
1
λ
123
=
P
S
123
123
、
λ
456
=
P
S
456
456
•
运算公式
Type1 时的功率因数
λ
的极性符号
si
表示超前与滞后的极性,符号[ 无 ] 表示滞后 (LAG),
符号
[-]表示超前 (LEAD)。
•
极性符号
si
(i)
取自各测量通道
(i)
的电压波形
U(i)s
与电流波形 I
(i)s
的超前与滞后。
si
12
、si
34
、si
123
分别
取自
Q
12
、Q
34
、Q
123
的符号。
•
运算公式
Type3 时的极性符号直接使用有功功率
P
的符号。
10
234
运算公式规格
接线设置
项目
1P2W 1P3W 3P3W2M 3V3A 3P3W3M 3P4W
功率相位角
选择运算公式
Type1 时
φ
(i)
=si
(i)
cos
-1
|
λ
(i)
|
φ
(i)(i+1)
=si
(i)(i+1)
cos
-1
|
λ
(i)(i+1)
|
φ
123
=si
123
cos
-1
|
λ
123
|
φ
456
=si
456
cos
-1
|
λ
456
|
选择运算公式 Type2 时
φ
(i)
=cos
-1
|
λ
(i)
|
φ
(i)(i+1)
=cos
-1
|
λ
(i)(i+1)
|
φ
123
=cos
-1
|
λ
123
|
φ
456
=cos
-1
|
λ
456
|
选择运算公式 Type3 时
φ
(i)
=cos
-1
λ
(i)
φ
(i)(i+1)
=cos
-1
λ
(i)(i+1)
φ
123
=cos
-1
λ
123
φ
456
=cos
-1
λ
456
•
运算公式
Type1 时的极性符号
si
表示超前与滞后的极性,符号 [无 ]表示滞后 (LAG),符号[-] 表示超
前
(LEAD)。
•
极性符号
si
(i)
取自各测量通道
(i)
的电压波形
U
(i)s
与电流波形
I
(i)s
的超前与滞后。
si
12
、
si
34
、
si
123
分别取自
Q
12
、
Q
34
、
Q
123
的符号。
•
运算公式
Type1 与 Type2 的运算公式中的
cos
-1
|
λ
|在 P ≧ 0时,替代 P<0时的情况,使用 |
180-cos
-
1
|
λ
||。
(i)
:测量通道、
M
:同步时序之间的采样数、
s
:采样点数
在
3V3A与 3P3W3M 中进行
∆
-Y转换时,使用 3P4W 的运算公式。
在
3P4W中进行 Y-
∆
转换时,直接使用 3P4W的运算公式。
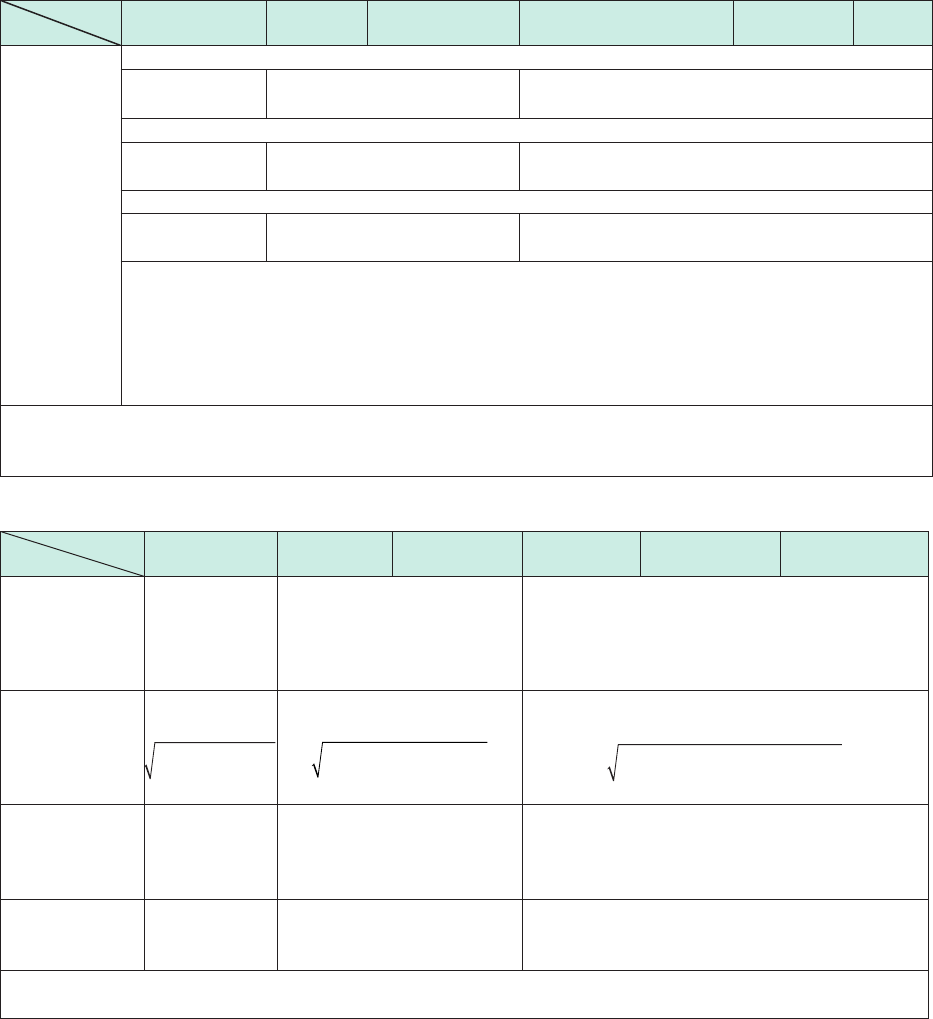
接线设置
项目
1P2W 1P3W 3P3W2M 3V3A 3P3W3M 3P4W
基波
有功功率
谐波有功
功率的
P
1(i)
谐波有功功率的
P
1(i)(i+1)
谐波有功功率的
P
1(i)(i+1)(i+2)
基波
视在功率
Sfnd
1(i)
=
PQ
1(i)
2
1(i)
2
()
+
()
Sfnd
1(i)(i+1)
=
PQ
1(i)(i+1)
2
1(i)(i+1)
2
()
+
()
Sfnd
1(i)(i+1)(i+2)
=
PQ
1(i)(i+1)(i+2)
2
1(i)(i+1)(i+2)
2
()
+
()
基波
无功功率
谐波无功功率的
Q
1(i)
×(-1)
谐波无功功率的
Q
1(i)(i+1)
×(-1)
谐波无功功率的
Q
1(i)(i+1)(i+2)
×(-1)
基波
功率因数
λfnd
1(i)
=
si
(i)
|
cosθ
1(i)
|
λfnd
1(i)(i+1)
=
si
(i)(i+1)
|
cosθ
1(i)(i+1)
|
λfnd
1(i)(i+1)(i+2)
=
si
(i)(i+1)(i+2)
|
cosθ
1(i)(i+1)(i+2)
|
极性符号
si
:运算公式 TYPE1时,取自基波无功功率的符号 ;运算公式 TYPE3时,取自基波有功功率的符号。选择
运算公式
Type2 时,不带极性符号。
235
运算公式规格
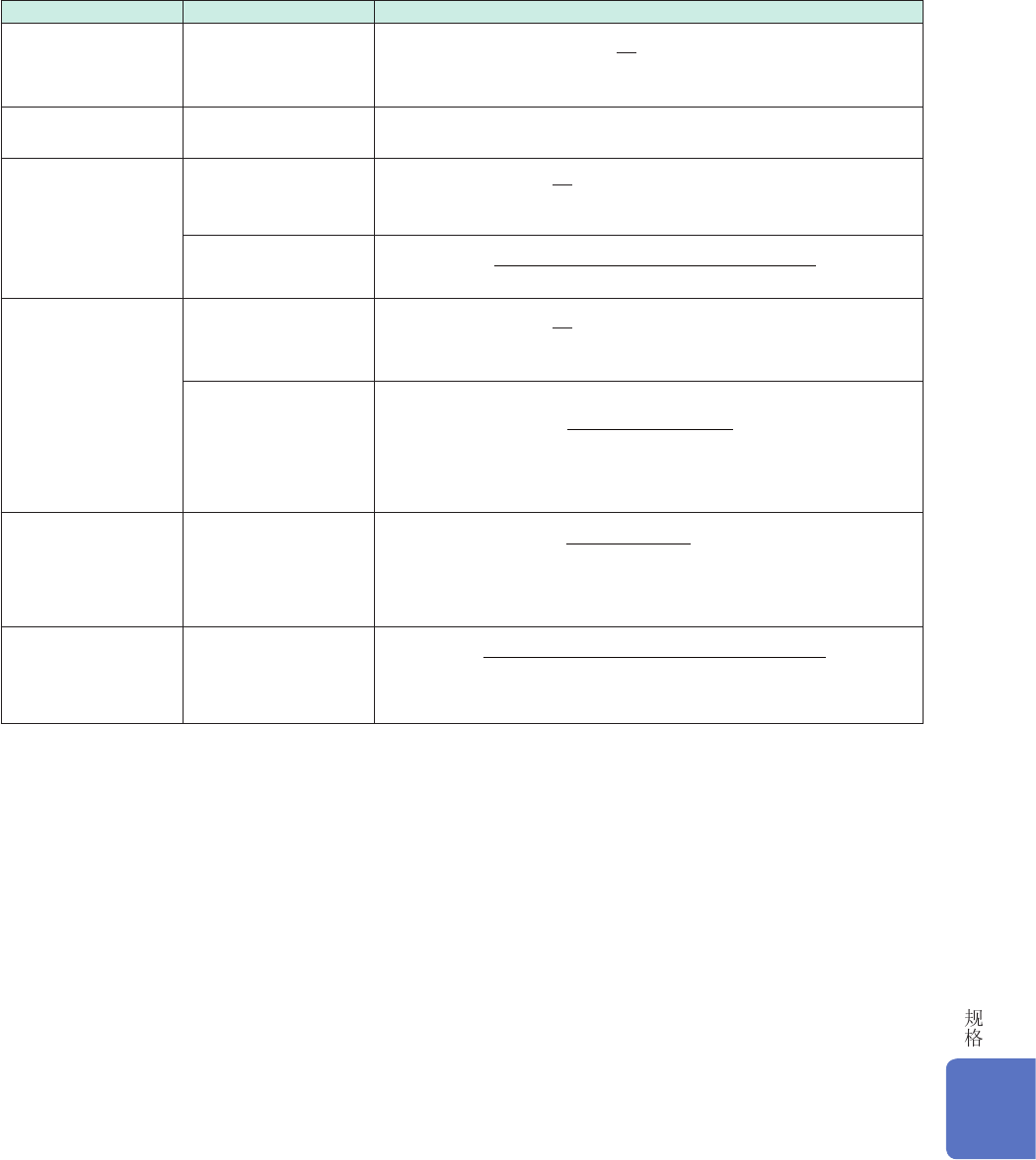
马达分析选件的运算公式
测量项目 设置 运算公式
电压 模拟
DC
1
0
1
M
A
s
S
M
=
∑
-
M
:同步时序之间的采样数,
s
:采样数
脉冲频率 脉冲 脉冲频率
扭矩
模拟
DC
1
0
1
M
A
s
S
M
=
∑
-
× 转换比设置值
M
:同步时序之间的采样数、
s
:采样数
频率
(测量频率 -
fc
设置值)× 额定扭矩值
fd
设置值
转速
模拟
DC
1
0
1
M
A
s
S
M
=
∑
-
× 转换比设置值
M
:同步时序之间的采样数、
s
:采样数
脉冲
60
× 脉冲频率
脉冲数设置值
Si
极性符号
si
在单模式下旋转方向检测有效时,取自A相脉冲的上升沿 /
下降沿与 B相脉冲逻辑电平 (High/Low)。
马达功率
2
×
π
× 转速
60
扭矩 × × 单位系数
扭矩单位为 N·m时,单位系数为 1 ;扭矩单位为 mN·m时,单位系
数为
1/1000 ;扭矩单位为 kN·m时,单位系数为 1000
转差率
2
×
60
× 输入频率 -| 转速 |× 极数设置值
2
×
60
× 输入频率
100
×
输入频率从
f
1 ~
f
6中选择
10