PW6001_user_manual_chi_20191018H.pdf - 第96页
90 查看马达测量值 (带马达 &D/A 型号) 如果旋转信号输入中输入了脉冲,并且在 CH D 中输入原点信号 (Or igin) 时将输入通道 1 ~ 6 的同步源设 为 Zph. ,则可查看以马达旋转 1 圈 (机械角 1 周期) 为基准的电压 / 电流测量值。 基波频率 (U1) 外部同步信号 ( Z 相) 基准 运算范围 基准 4 极马达示例 • 由于可始终将马达旋转 1 圈作为运算范围进行处理 (与马达极数无关) ,…
89
查看马达测量值(带马达 &D/A型号)
检测马达的旋转方向
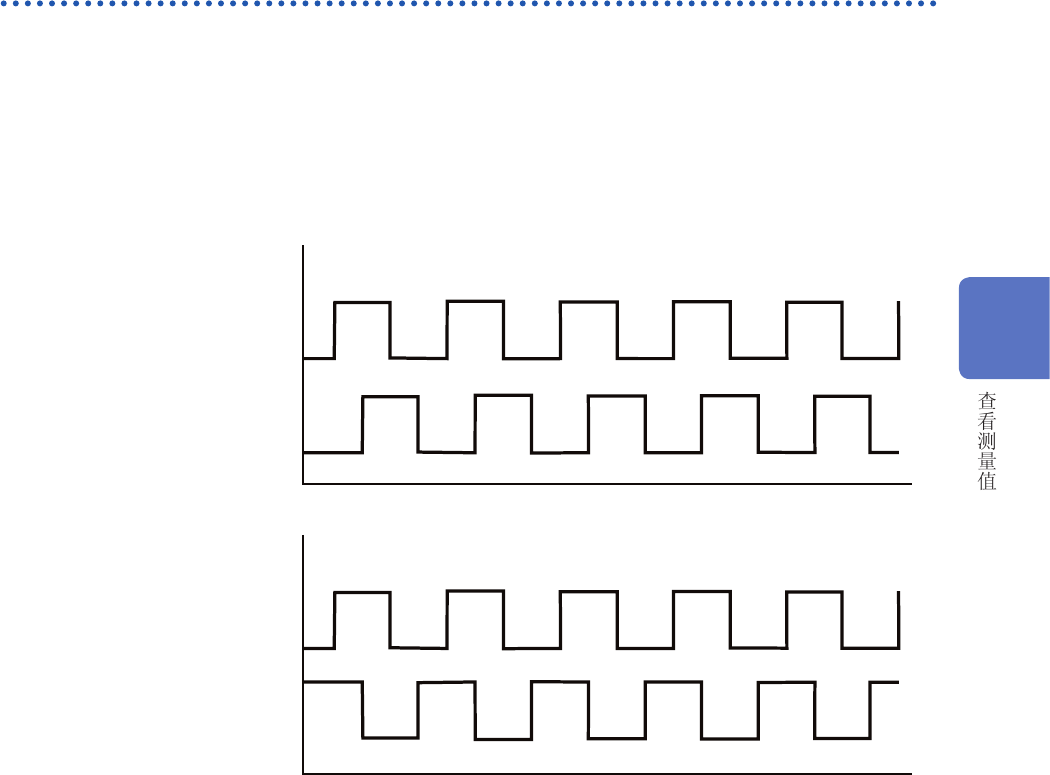
在旋转信号输入 CH B 与 CH C输入端子中输入增量式旋转编码器的 A 相脉冲与 B相脉冲时,可检测
轴的旋转方向并在转速上附加极性符号。
如果在测量项目的设置中选择模式 1 或模式 2,则会检测旋转方向。
按照 A 相脉冲与 B相脉冲的上升 / 下降检测时序,根据另一方的电平 (High/Low) 判定旋转方向。
A相
B相
正转
转速的极性符号为 +
A相
B相
反转
转速的极性符号为 -
已检测的旋转方向作为极性符号附加在转速测量值上,并且也会反映到马达功率 (Pm) 的测量值中。
3
90
查看马达测量值(带马达 &D/A型号)
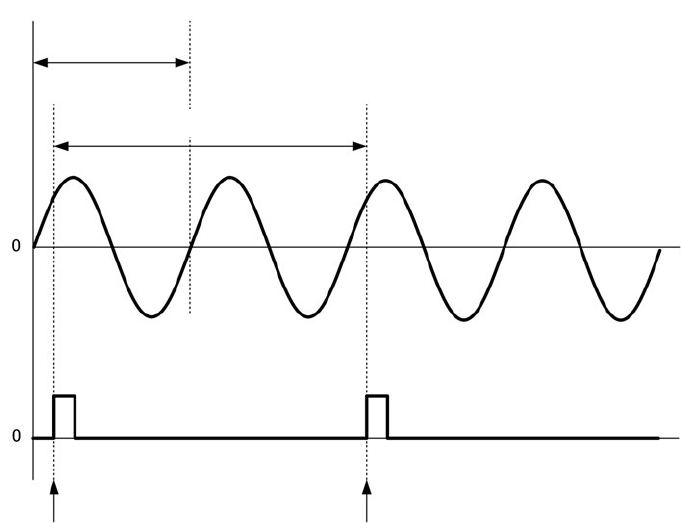
如果旋转信号输入中输入了脉冲,并且在
CH D中输入原点信号 (Origin) 时将输入通道 1 ~ 6的同步源设
为 Zph.,则可查看以马达旋转 1 圈(机械角 1周期)为基准的电压 /电流测量值。
基波频率 (U1)
外部同步信号(Z 相)
基准
运算范围
基准
4极马达示例
•
由于可始终将马达旋转
1圈作为运算范围进行处理(与马达极数无关),因此,可对因马达机械特性而导
致的各极偏差进行平均化测量。
•
作为“马达极数
/2”的次数,电压/ 电流的谐波测量值会以基波测量值的形式出现。在这之后,“马达极数
/2 × n”会以电压 /电流的 n 次谐波的形式出现。
•
电压
/电流的频率测量值用于测量电压 / 电流的基波频率。
•
可在马达分析的动作模式(第
80页)为 Single时使用。
•
请进行与
CH A ~ CH D测量项目(第 82 页)相应的输入。不仅要向 CH D(Z 相脉冲)中输入原点信号,
而且还要向 CH B(A 相脉冲)、CH C(使用Direction时的 B 相脉冲)中正确地输入旋转信号。
•
要将任意脉冲(而非旋转编码器输出的脉冲)用作运算范围的基准时,建议采取将马达分析的动作模式设
为
Indiv.,将输入通道1 ~ 6的同步源设为 CH C 或 CH D的方法。请在选择的同步源中输入基准脉冲。
91
4
查看波形
可显示要测量的所有通道的电压 / 电流波形或马达输入波形。
由于波形显示操作与功率测量完全独立,因此,本章记载的操作不会影响功率或谐波的测量值。
4.1 显示波形
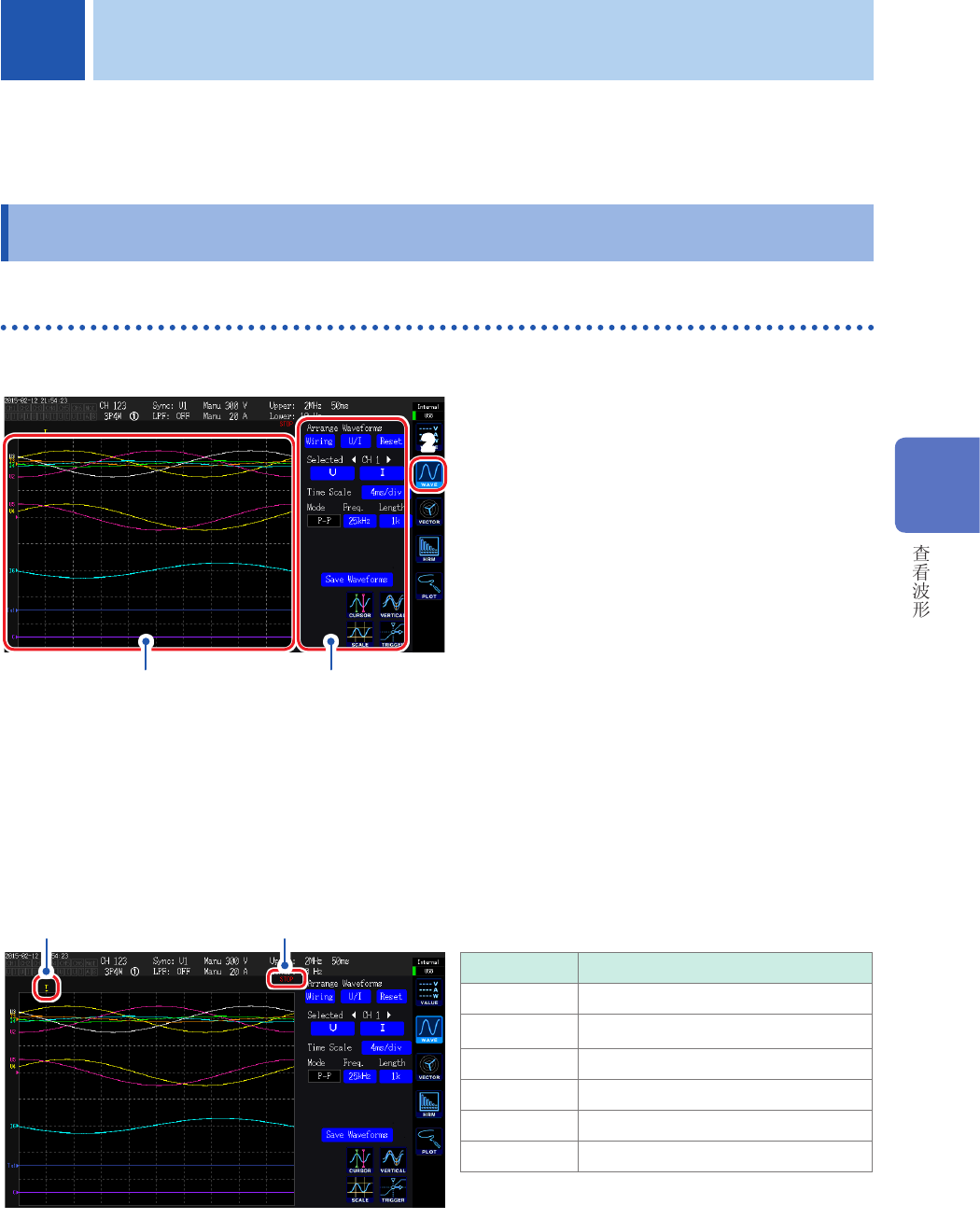
在波形显示 (WAVE) 画面中进行显示
在画面中仅显示波形。
波形显示区域 设置区域
2
1
按下 [MEAS] 键
2
触摸 WAVE
3
按下 [RUN/STOP]键
(
[RUN/STOP] :点亮为绿色)
开始波形记录,并更新画面显示。(进行触
发之后,开始记录(第 100页) )
4
再次按下 [RUN/STOP]键
(
[RUN/STOP] :点亮为红色)
停止波形记录与画面显示更新。
波形记录状态的显示
波形显示需要时间时或不显示波形时,作为状态的大致标准。
波形记录状态触发位置(第 98页)
显示 状态说明
STOP 记录停止
WAIT 等待触发
PTR 预触发波形记录
STRG 触发后的波形记录
CMP 生成显示用波形
ABRT 波形记录停止处理
4 查看波形
4