PW6001_user_manual_chi_20191018H.pdf - 第242页
236 运算公式规格 谐波测量项目的运算公式 接线设置 项目 1P2W 1P3W 3P3W2M 3V3A 3P3W3M 3P4W 谐波电压 U k(i) = UU kr ik ii () () () + () 22 谐波电压 相位角 θU k(i) =tan -1 U U kr i ki i () () − 谐波电流 I k(i) = II kr ik ii () () () + () 22 谐波电流 相…
235
运算公式规格
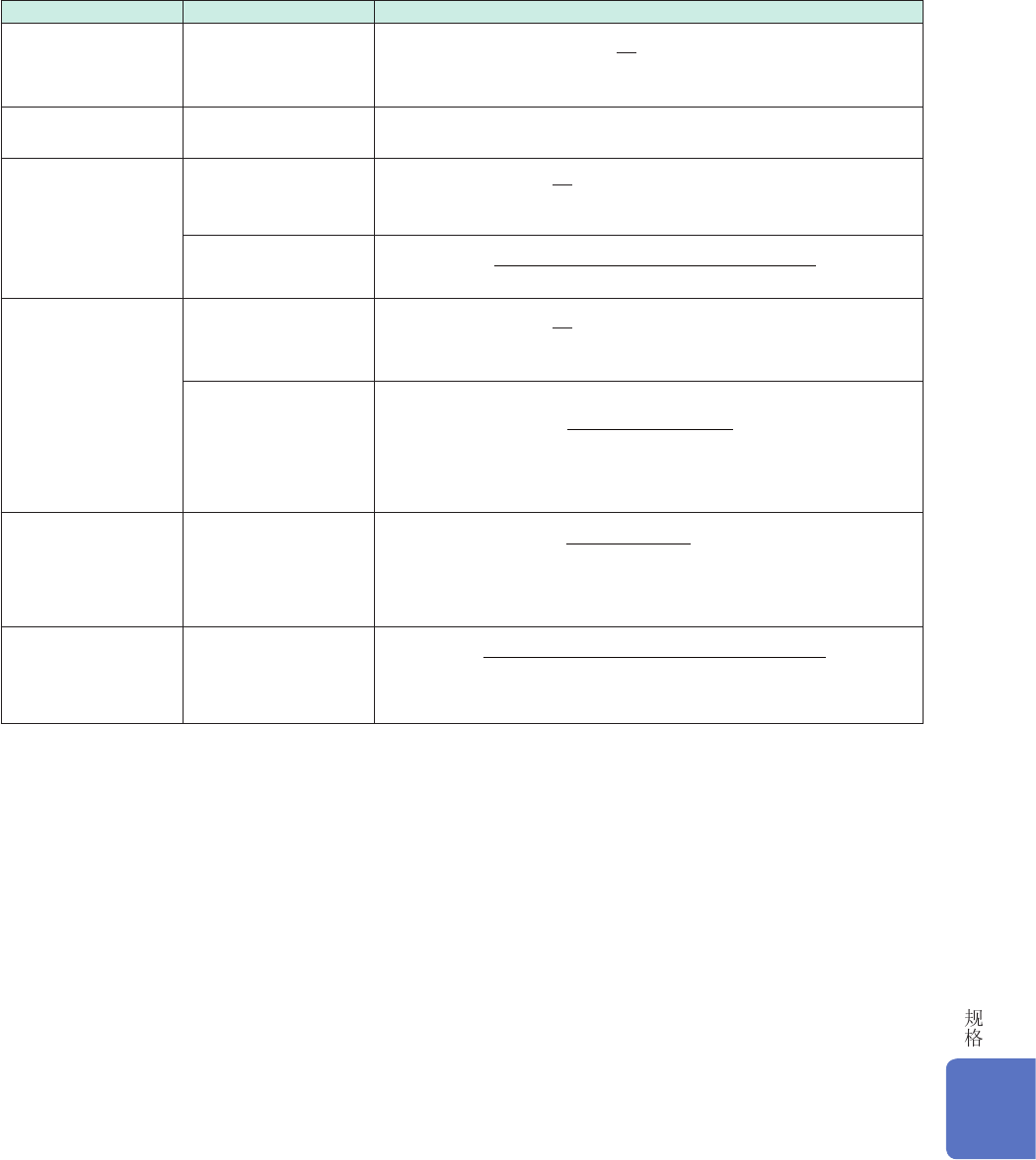
马达分析选件的运算公式
测量项目 设置 运算公式
电压 模拟
DC
1
0
1
M
A
s
S
M
=
∑
-
M
:同步时序之间的采样数,
s
:采样数
脉冲频率 脉冲 脉冲频率
扭矩
模拟
DC
1
0
1
M
A
s
S
M
=
∑
-
× 转换比设置值
M
:同步时序之间的采样数、
s
:采样数
频率
(测量频率 -
fc
设置值)× 额定扭矩值
fd
设置值
转速
模拟
DC
1
0
1
M
A
s
S
M
=
∑
-
× 转换比设置值
M
:同步时序之间的采样数、
s
:采样数
脉冲
60
× 脉冲频率
脉冲数设置值
Si
极性符号
si
在单模式下旋转方向检测有效时,取自A相脉冲的上升沿 /
下降沿与 B相脉冲逻辑电平 (High/Low)。
马达功率
2
×
π
× 转速
60
扭矩 × × 单位系数
扭矩单位为 N·m时,单位系数为 1 ;扭矩单位为 mN·m时,单位系
数为
1/1000 ;扭矩单位为 kN·m时,单位系数为 1000
转差率
2
×
60
× 输入频率 -| 转速 |× 极数设置值
2
×
60
× 输入频率
100
×
输入频率从
f
1 ~
f
6中选择
10
236
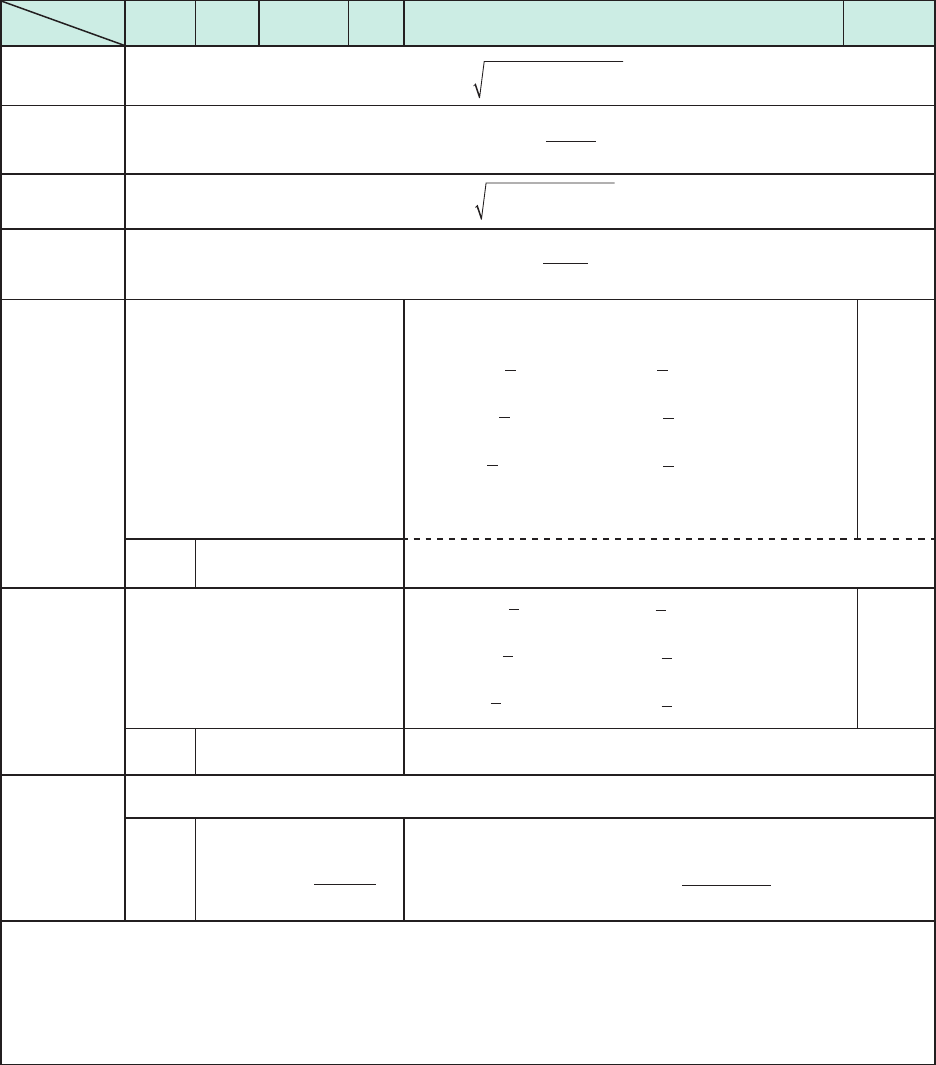
运算公式规格
谐波测量项目的运算公式
接线设置
项目
1P2W 1P3W 3P3W2M 3V3A 3P3W3M 3P4W
谐波电压
U
k(i)
=
UU
kr
ik
ii() ()
()
+
()
22
谐波电压
相位角
θU
k(i)
=tan
-1
U
U
kr i
ki i
()
()
−
谐波电流
I
k(i)
=
II
kr
ik
ii() ()
()
+
()
22
谐波电流
相位角
θI
k(i)
=tan
-1
I
I
kr i
ki i
()
()
−
谐波
有功功率
P
k(i)
=U
kr(i)
×I
kr(i)
+U
ki(i)
×I
ki(i)
P
k(i)
=
1
3
(U
kr(i)
-U
kr(i+2)
)×I
kr(i)
+
1
3
(U
ki(i)
-U
ki(i+2)
)×I
ki(i)
P
k(i+1)
=
1
3
(U
kr(i+1)
-U
kr(i)
)×I
kr(i+1)
+
1
3
(U
ki(i+1)
-U
ki(i)
)×I
ki(i+1)
P
k(i+2)
=
1
3
(U
kr(i+2)
-U
kr(i+1)
)×I
kr(i+2)
+
1
3
(U
ki(i+2)
-U
ki(i+1)
)×I
ki(i+2)
与
1P2W
相同
--
P
k(i)(i+1)
=P
k(i)
+P
k(i+1)
P
k(i)(i+1)(i+2)
=P
k(i)
+P
k(i+1)
+P
k(i+2)
谐波
无功功率
(仅用于内部运
算)
Q
k(i)
=U
kr(i)
×I
ki(i)
-U
ki(i)
×I
kr(i)
Q
k(i)
=
1
3
(U
kr(i)
-U
kr(i+2)
)×I
ki(i)
-
1
3
(U
ki(i)
-U
ki(i+2)
)×I
kr(i)
Q
k(i+1)
=
1
3
(U
kr(i+1)
-U
kr(i)
)×I
ki(i+1)
-
1
3
(U
ki(i+1)
-U
ki(i)
)×I
kr(i+1)
Q
k(i+2)
=
1
3
(U
kr(i+2)
-U
kr(i+1)
)×I
ki(i+2)
-
1
3
(U
ki(i+2)
-U
ki(i+1)
)×I
kr(i+2)
与
1P2W
相同
--
Q
k(i)(i+1)
=Q
k(i)
+Q
k(i+1)
Q
k(i)(i+1)(i+2)
=Q
k(i)
+Q
k(i+1)
+Q
k(i+2)
谐波电压电流
相位角
θ
k(i)
=θI
k(i)
-θU
k(i)
--
θ
k(i)(i+1)
=tan
-1
Q
P
ki i
ki i
()
+
()
()
+
()
1
1
θ
k(i)(i+1)(i+2)
=tan
-1
Q
P
ki ii
ki ii
()
+
()
+
()
()
+
()
+
()
12
12
•
(i)
:测量通道、
k
:分析次数、
r
:FFT后的实数部分、
i
:FFT后的虚数部分
•
谐波电压相位角与谐波电流相位角将作为相位基准的谐波同步源基波补偿为
0°
(但谐波同步源为 Ext时除外)
同步源为 DC时,将数据更新时序设为 0°。
同步源为 Ext、Zph.、CH C、CH D时,将同步脉冲的上升沿设为 0°。(有谐波用 AAF的群延迟补偿)
•
对于谐波电压电流相位差,以相电压为基准运算
3P3W3M、3P4W时的各相相位差,而与
∆
转换的 ON/OFF无关。
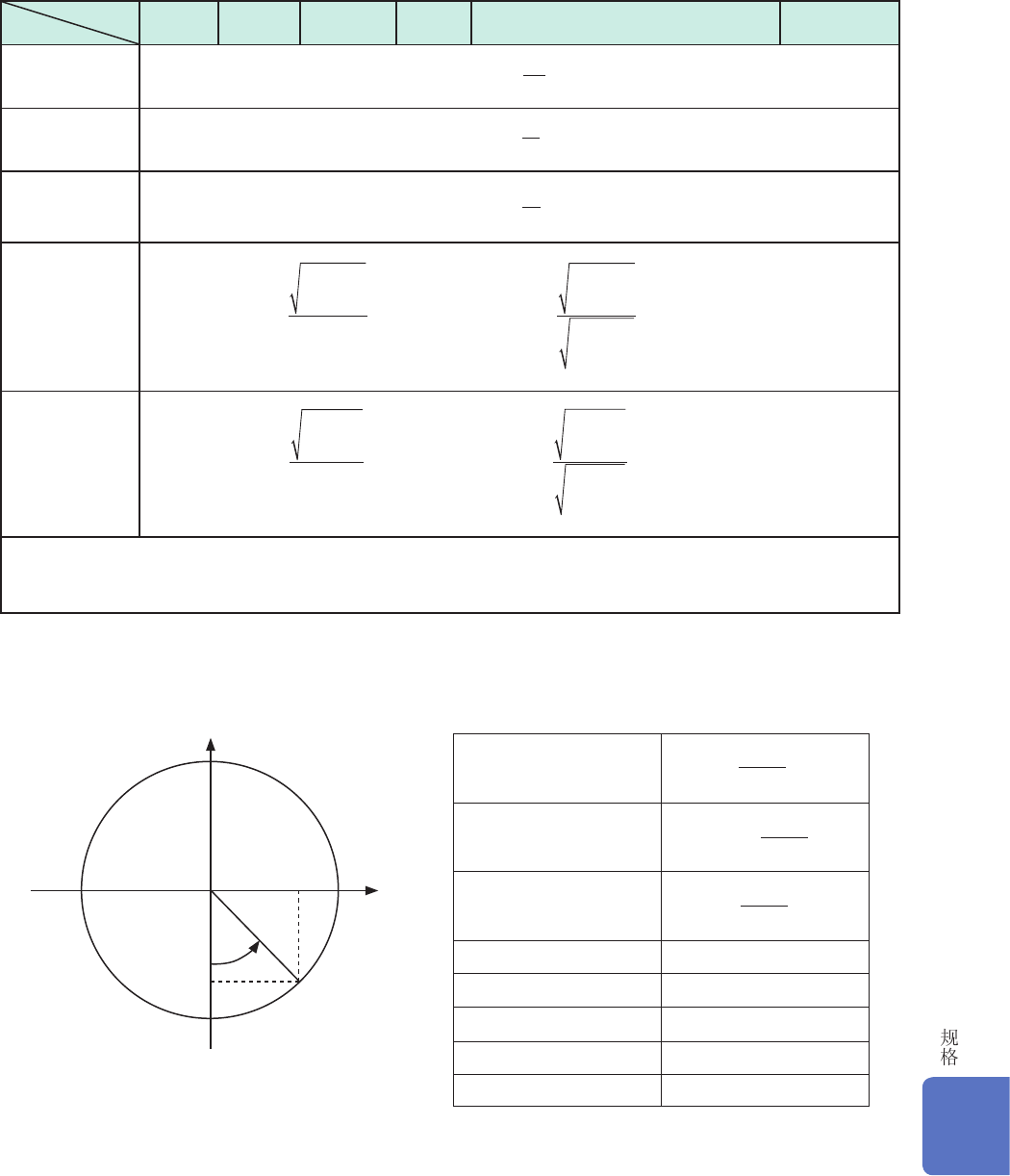
237
运算公式规格
接线设置
项目
1P2W 1P3W 3P3W2M 3V3A 3P3W3M 3P4W
谐波电压
含有率
U hd
k(i)
=
U
U
k
1
×100
谐波电流
含有率
I hd
k(i)
=
I
I
k
1
×100
谐波功率
含有率
Phd
k(i)
=
P
P
k
1
×100
总谐波
电压失真率
Uthd
(i)
=
U
U
k
k
K
()
=
∑
2
2
1
×100
(THD-F设置时)或
U
U
k
k
K
k
k
K
()
()
=
=
∑
∑
2
2
2
1
×100
(THD-R设置时)
总谐波
电流失真率
Ithd
(i)
=
I
I
k
k
K
()
=
∑
2
2
1
×100
(THD-F设置时)或
I
I
k
k
K
k
k
K
()
()
=
=
∑
∑
2
2
2
1
×100
(THD-R设置时)
(i)
:测量通道、
k
:谐波次数、
K
:最大分析次数(可根据同步频率进行变更)
Real
θ
U
k(i)
U
kr(i)
U
ki(i)
I
IV
II
(-)
(-)
-90°
+90°
+180°
(+)
(+)
III
Image
0°
相位基准
例 :谐波电压时
I
tan
−
()
()
−
1
U
U
kr i
ki i
+180°
III、IV
tan
−
()
()
−
1
U
U
kr i
ki i
II
tan
−
()
()
−
1
U
U
kr i
ki i
-180°
U
ki(i)
= 0、U
kr(i)
<
0
-90°
U
ki(i)
= 0、U
kr(i)
>
0
+90°
U
ki(i)
<
0、U
kr(i)
= 0
0°
U
ki(i)
= 0、U
kr(i)
= 0
0°
U
ki(i)
> 0、U
kr(i)
= 0
+180°
10