PW6001_user_manual_chi_20191018H.pdf - 第92页
86 查看马达测量值 (带马达 &D/A 型号) 选择 Pulse 时 项目 选择项目 内容 马达极数 以 2 ~ 254 范围内的偶数设置要测量 马达的极数 用于将作为转差率运算或对应机械角的频率所输入的旋 转信号转换为对应于电相角的频率。 在数字键窗口中进行输入。 脉冲数 在 1 ~ 60000 的范围内设置机械角旋 转 1 圈的脉冲数 连接 1 圈 1000 脉冲的增量式旋转编码器时, 设置 1000 。 在数字键窗口中进…
85
查看马达测量值(带马达 &D/A型号)
项目 选择项目 内容
扭矩单位
mNm、Nm、kNm 请根据要连接的扭矩传感器进行设置。
转换 0.01 ~ 9999.99 范围内的任意数值
请组合扭矩单位的设置,设置要连接的扭矩传感器的额
定扭矩。
中心频率
频率范围
在
1 kHz ~ 500 kHz的范围内按 1 Hz
步幅进行设置
分别在中心频率设置扭矩为 0的中心频率,在频率范围设
置传感器额定扭矩时的频率与中心频率之差的频率。
不能设置超出下述限制的数值。
(中心频率
+ 频率范围)≦ 500 kHz
(中心频率 - 频率范围)≧ 1 kHz
设置旋转信号输入
项目 选择项目 内容
输入设置
选择要连接的旋转信号类型。
Analog
直流 (DC) 电压信号与转速成比例时
仅测量项目模式为
4时可选择。
Pulse 脉冲信号与转速成比例时
下述设置项目会因选择的设置而异。
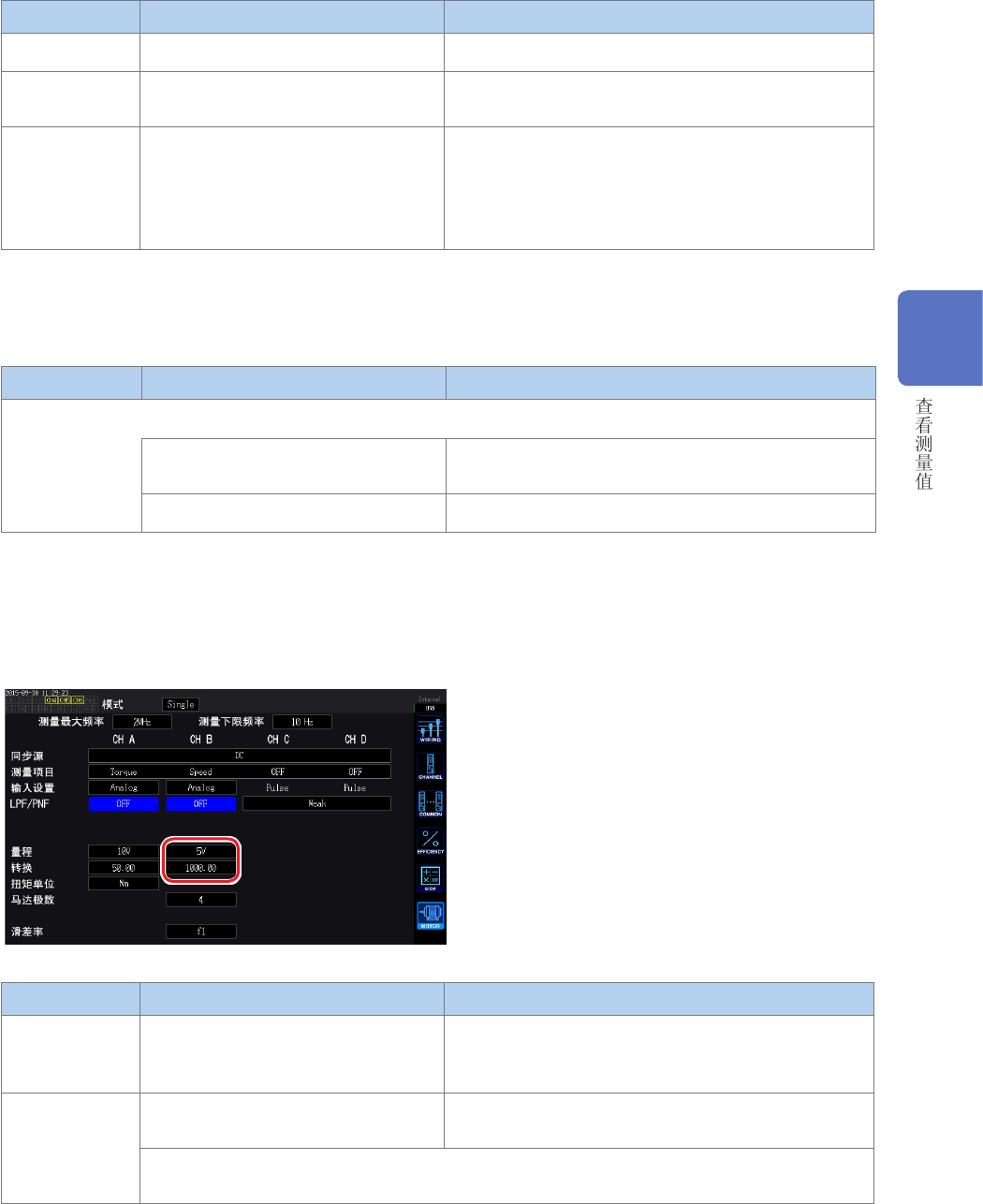
选择 Analog 时
将输入设置设为Analog 时,根据旋转信号设置
量程、转换 2 个项目。
项目 选择项目 内容
量程
1 V量程、5 V 量程、10 V 量程
请根据要连接的旋转信号的输出电压进行选择。
通道显示 LED处于 AB点亮状态时,也可以利用电流量
程键操作旋转信号输入的电压量程。
转换
在
0.01 ~ 99999.9的范围内设置任意
值
在数字键窗口中进行输入。
显示为转速测量值
= 输入电压 × 转换比值。
请设置要连接的旋转信号输出的
1 V的值。
3
86
查看马达测量值(带马达 &D/A型号)
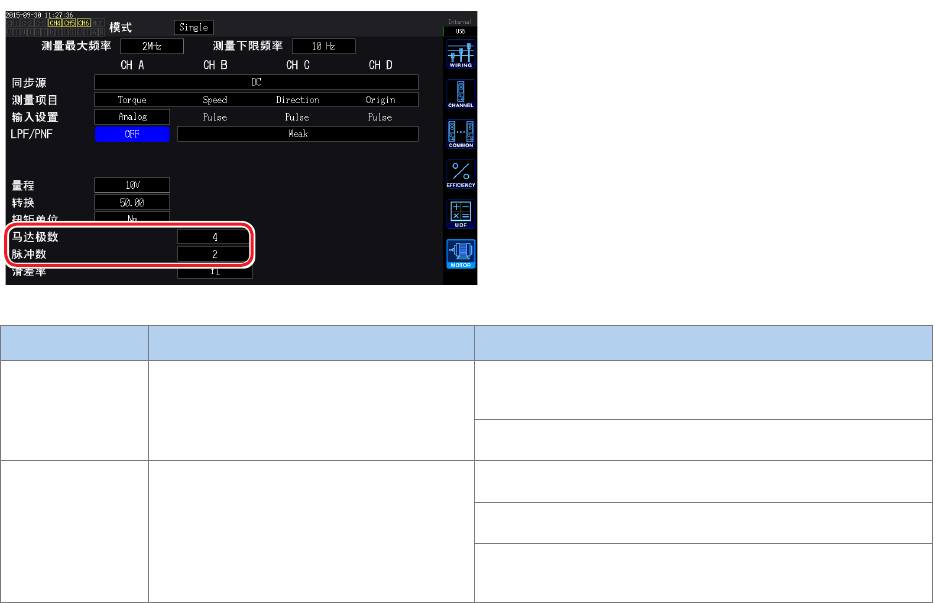
选择
Pulse时
项目 选择项目 内容
马达极数
以
2 ~ 254 范围内的偶数设置要测量
马达的极数
用于将作为转差率运算或对应机械角的频率所输入的旋
转信号转换为对应于电相角的频率。
在数字键窗口中进行输入。
脉冲数
在
1 ~ 60000 的范围内设置机械角旋
转
1圈的脉冲数
连接
1圈 1000 脉冲的增量式旋转编码器时,设置1000。
在数字键窗口中进行输入。
如果设置马达极数设置值的
1/2 倍数,则可在同步源中
选择
Ext。
87
查看马达测量值(带马达 &D/A型号)
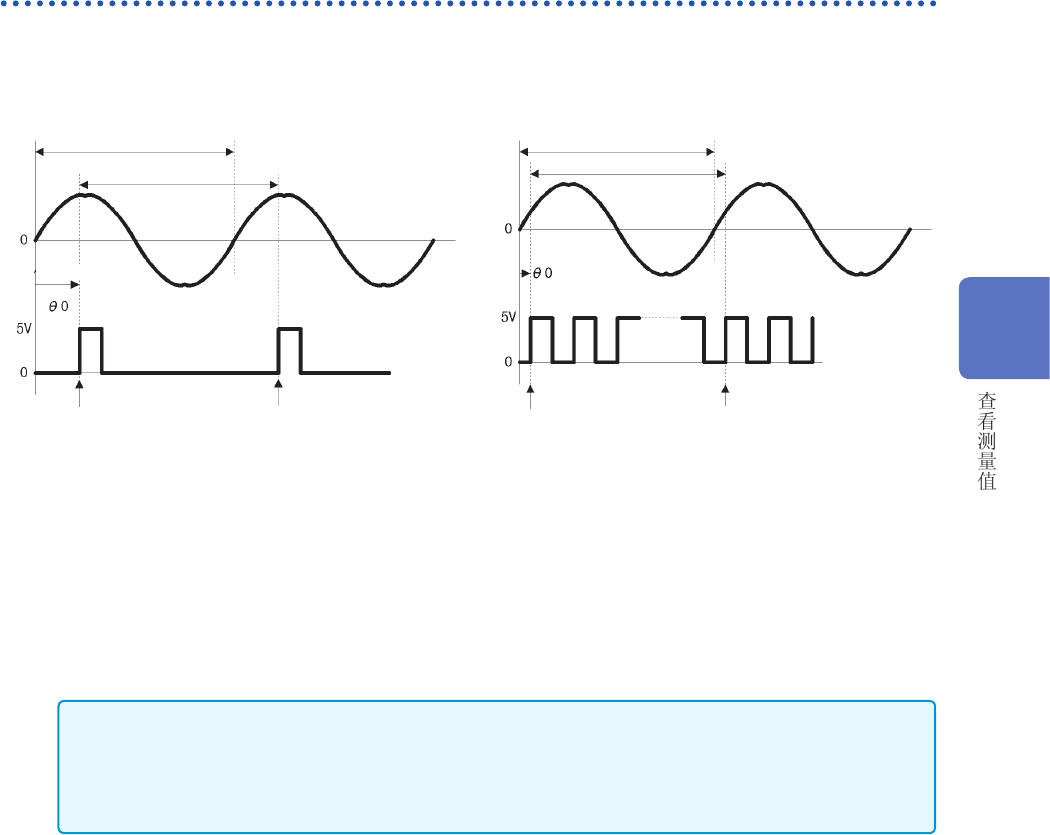
测量马达的电相角
如果在旋转信号输入中输入脉冲时将输入通道1 ~ 6 的同步源设为Ext1 或 Ext2,则可查看以脉冲
为基准的电压、电流相位的变化。
利用多个脉冲测量电相角时
•
建议使用原点信号(
Z相)。如果使用原点信号(Z 相),则可根据原点信号确定基准脉冲,始终进行
以固定脉冲为基准的相位测量。
•
不使用原点信号(
Z相)时,同步时确定基准脉冲。未取得同步时,可能会在再次取得同步时以不同
的脉冲为基准。
•
为了与旋转信号输入脉冲同步地进行谐波分析,需要输入频率的整数倍脉冲数。比如,为
4极马
达时,需要 2 的整数倍脉冲数 ;为 6极马达时,需要 3 的整数倍脉冲数。
•
按
3P3W3M接线方式测量内部为Y 接线的马达时,可通过使用
∆
-Y转换功能测量相电压与相电
流的相位角。
基波频率 (U1)
运算范围
外部同步信号
相位差
基准
基准
基波频率 (U1)
运算范围
外部同步信号
基准
基准
3